
基于模糊算法的双电机履带式推土机转向控制策略研究
2018-03-06 00:44宁源源
建筑机械 2018年2期
王 昌,赵 勇,宁源源
转向控制是履带式车辆动力学控制的核心内容,也是电传动履带式车辆研究开发过程中的重要环节,许多学者研究并提出了有效的控制策略[1-4],但仍存在一些问题,如转向不够灵活、缺乏稳定性、系统响应时间过长等[5-8]。
针对以上问题,本文首先分析了履带车辆的转向特性,提出了基于模糊算法的双电机履带式推土机转向控制策略,该控制策略由模糊控制单元和两侧电机控制器组成。驾驶员模型实时对驾驶员意图进行解释,并对内部电机控制器发出目标指令,使履带车辆实现稳定的转向轨迹,并提高横摆角速度动态响应能力。最后,基于Matlab/Simulink建立了转向控制系统的仿真模型,并对控制策略进行仿真验证。
1 双电机驱动系统
双电机履带式推土机的电传动系统通过独立控制两侧电机实现车辆的驱动和转向。发动机、发电机和超级电容共同组成车载能源系统。
该系统具有结构简单、控制灵活等优点。是目前最广泛使用的履带式推土机电传动结构。
发动机驱动发电机发电,经过整流变换后作为汽车能源,集成控制单元和电机控制器通过CAN总线连接,电机控制器控制电机。在转矩调节控制策略中,集成控制单元将油门踏板、制动踏板和拇指轮输入解释为电机两侧的目标转矩,实时发送到电机控制器,并接收电机控制器的反馈。电机控制器实时调节转矩,以确保实际输出转矩与目标转矩命令相同。

图1 双电机履带式推土机系统结构示意图
推土机的运动由两侧电机输出转矩决定。两侧电机转矩之和克服车辆的滚动阻力,决定了车辆的平均加速度;两侧电机转矩之差克服车辆滚动阻力矩、转向阻力矩的总和,决定了转向横摆率。如果可以随时控制电机的转矩差值,则可以根据驾驶员的意图来控制整个车辆的加速度和转向角加速度,并且可以实现按照预定的轨迹运动。这是转矩控制策略的基本思想。
2 数学建模
混合动力履带式推土机主要包括以下驾驶员控制设备:拇指轮、制动踏板,转向手柄,作业装置手柄。数学模型的详细描述如下:
2.1 拇指轮
拇指轮向中央控制单元发送信号,给出驾驶员想要的推土机速度指令。拇指轮的旋转角度与最大行驶速度之间的关系定义如下:

式中 vs是拇指轮当前角度对应的车速,φ是拇指轮的旋转角度,φmax是拇指轮最大旋转转角,Vmax和Vmin分别是推土机理论最大最小行驶速度。
2.2 转向手柄
转向手柄负责两个方面的功能,向前和向后推动手柄以控制推土机驱动模式,向左右推动手柄以控制推土机转向。规定左转为负,右转为正。转向手柄的角位移与其最大角位移的比率对应于推土机的转向角速度:= -

式中 α是转向手柄转动角度,maxα和minα分别表示最大旋转角度以及转向手柄的自由行程角度。
2.3 制动踏板
制动踏板的不同位置对应电机制动器和机械制动器,并定义了与电机制动范围内制动踏板角位移相对应的推土机减速度线性关系,如下:

式中 β是制动踏板转动角度,v是推土机的速度减少量,βmax和β0分别为制动踏板最大角位移和制动踏板的自由行程。
2.4 推土机动力学模型
式中 M是车辆质量,vy是沿纵轴中心线速度分量,F1、2是地面对车辆的作用力,Fr1和Fr2是两侧履带受到的滚动阻力,Iz是车辆的惯性矩,w是转向角速度,B是履带中心距,Mh是转向阻力矩,φ是地面附着系数,T1、2是两侧电机的启动转矩,i0是马达输出轴到驱动轮的传动比,η是电机的输出轴到驱动轮的效率,r是驱动轮半径,λ是履带中心的垂直偏移量,L是履带的接地长度,u是转向阻力系数。
3 转向控制策略
转向控制策略设计的关键是将拇指轮输入信号解释为两侧电机的控制指令,使车辆能够根据驾驶员的意图行驶。
当推土机转向过程达到稳态时,如果外侧阻力不变,则转弯半径R仅与内侧的制动力有关。因此,驾驶员拇指轮信号可以被解释为内侧电机的制动力矩:

图2 模糊控制策略流程图

式中 TBmax是内侧电机的最大制动力矩,~代表是估值,wm1是内侧电机的转速,max { TB( wm1)}机当前的转速下的最大制动转矩,λs是方向盘转角输入信号。

首先确定内侧电机的目标转矩,然后根据两两侧电机转矩与制动力之间的关系,使用外侧电动机的转矩来跟随内侧电机,然后可以得到外侧电机的转矩。
4 模糊控制策略
很多时候对象不能被准确控制或是难以建立精确的数学模型。因此,如果可以使用语言来描述人的经验并且形成一系列控制规则的条件语句。然后使用模糊理论、模糊语言变量和模糊逻辑推理将模糊控制规则提升为数值运算,这样可以用计算机程序实现这些控制规则。因此,可以使用计算机模拟来自动控制受控对象,这便是模糊控制的基本思想。
模糊控制器由4部分组成:(1)模糊:主要功能是选择模糊控制器的输入并将其转换为系统可以识别的模糊量。(2)规则库:根据人类专家的经验建立模糊规则库。(3)模糊推理:主要实现基于知识的推理决策。(4)清晰化:主要作用是控制量的推理转变成控制输出。
为了实现控制目标的转向,采用模糊控制策略对外侧马达的目标转矩进行控制。模糊控制器采用的是Mandani结构,这种结构是双输入单输出,模糊输入包括转向半径及其变化率,模糊输出是外部电机扭矩的调整系数,模糊输出和输出变量的隶属函数如图3所示。

图3 模糊输入输出隶属度函数
模糊控制规则是基于外部电机转矩调节的实时模糊输入,其控制思想是:如果R比较大且dR也比较大意味着车辆在在转向的初始阶段,则应对外部电机转矩施加更大的调节量,然后增加dR。另一方面,如果R和dR都是比较小的值,这意味着转向瞬态过程结束较快,然后力矩分配策略的目标值应该是一个较小的dR调整。
根据模糊输入的隶属度函数,可以建立12条模糊规则,模糊规则的形式为:

在确定了模糊输入的系数之后,外电机目标转矩为:

5 MATLAB仿真与结果
在MATLAB/SIMULINK环境下建立了电传动履带推土机转向仿真模型,对转向模糊控制策略进行了仿真验证,并给出了控制模块的仿真模型如图4所示。

图4 模糊转向控制策略仿真模块
与原始转矩控制策略相比,引入模糊算法后,有效地消除了参数波动对车辆运行状态的影响。车辆的速度可以更迅速的进入稳定状态并且车辆控制策略更符合驾驶员的意图。
当转向角度超过45°时,两个电机的转矩之间的差异相对于电机的目标转矩太小,根据T2= x (T2- T1) +T1,我们可以看出这时的模糊控制效果不明显,所以本文验证情况时,拇指轮转动30°和15°。
通过仿真可以发现与没有模糊控制的转向策略相比,采用模糊控制策略可以明显改善转向响应能力。从图5可以看出,在没有模糊控制的情况下推土机实现稳定需要约6s,而在使用模糊控制的情况下只需要3s,大大提高了推土机的转向稳定性和灵活性,在图6中可以得出同样的结论,同等条件下,采用模糊算法推土机可更迅速地达到稳态。
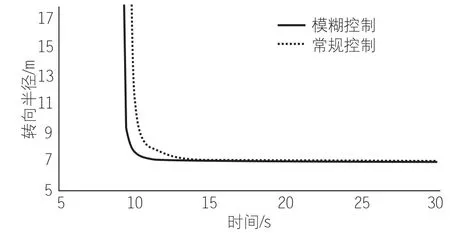
图5 转角为30°时的仿真结果

图6 转角为15°时的仿真结果
6 结论
在一定的外部阻力情况下,当履带式推土机转向进入稳定阶段时,转向半径仅与内侧履带有关。模糊控制减小了履带式推土机的动态响应时间,减少了车辆转向所需的时间,使车辆变得更加灵活。仿真结果表明,本文提出的控制策略可以实现良好的履带式推土机转向性能,具有更好的稳定性,提高了转向动态响应能力。
[1] 翟丽,孙凤春,谷中丽. 电子差速履带车辆转向转矩神经网络PID控制[J]. 农业机械学报,2009,40(2):1-5.
[2] 孙逢春,陈树勇,郭汾. 基于转矩控制策略的电传动履带车辆驱动特性研究[J]. 兵工学报,2007,28(02):129-133.
[3] 邹渊,孙逢春,张承宁. 电传动履带车辆双侧驱动转矩调节控制策略[J]. 兵工学报,2007,28(12):1409-1414.
[4] 翟丽,孙凤春,谷中丽,等. 电传动履带车辆电子差速转向控制策略[J]. 北京理工大学学报,2009,29(2):113-117.
[5] 陈泽宇,赵广耀,翟丽,等. 基于模糊PID算法的双侧电传动履带车辆转向控制策略研究[J]. 中国机械工程学报,2013,24(3):410-414.
[6] 宋强,曾普,王红. 串联电传动履带推土机功率跟随控制策略研究[J]. 北京理工大学学报,2014,34(03):267-272.
[7] 孙尚志,郝东辉,孙骏. 电—电混合动力电动汽车的建模与仿真[J]. 农业装备与车辆工程,2011,(1):11-15.
[8] 鲁连军,孙逢春,翟丽. 基于MATLAB SIMULINK的电传动履带车辆转向性能仿真[J]. 兵工学报,2006,27(1):69-74.
猜你喜欢
兵器装备工程学报(2021年3期)2021-04-09
装备制造技术(2020年11期)2021-01-26
石油化工建设(2019年6期)2020-01-16
电子制作(2018年11期)2018-08-04
现代农机(2018年1期)2018-02-11
中国军转民(2017年6期)2018-01-31
Coco薇(2015年10期)2015-10-19
筑路机械与施工机械化(2015年8期)2015-09-11
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
