
无人驾驶重型车辆底盘电控化改装技术研究
2018-03-06 04:28周元豪黄茂杨大磊林森
汽车实用技术 2018年3期
周元豪,黄茂,杨大磊,林森
(陕西重型汽车有限公司,陕西 西安 710200)
前言
随着智能技术的不断发展,无人驾驶技术凭借其广阔的应用前景,已经成为航空、航天、汽车、军事等行业的研究热点。在汽车领域,国内外已经出现了各种各样的无人驾驶车辆,虽然这些无人驾驶车辆大部分还都处于原理样机阶段,但已经显示出了无人驾驶的巨大优势。
国内的无人驾驶车辆绝大部分都是在现有的量产乘用车上进行改装,其底盘大都采用电喷发动机及自动变速箱,以便于适应无人驾驶改装。油门、换挡、刹车等车辆操作机构均采用电机驱动机械臂的方式,这种方式纯粹模拟驾驶员的操作动作,系统复杂,可靠性难以保障。另外电机驱动机械臂运动一般都需要配合减速器使用,整套装置体积较大,需占用一定车内空间。随着汽车电子技术的快速发展,车辆底盘的电控化、总线化为无人驾驶系统对车辆底盘的控制提供了新的途径。比如,大部分发动机、变速箱的电控系统本身预留了供第三方控制的总线接口及I/O接口,无人驾驶计算机可以直接利用这些接口控制发动机、变速箱,省去了电机、减速器、机械臂等一种套驱动装置,简化了整个无人驾驶系统的结构。
1 无人驾驶底盘改装技术方案
随着近些年我国汽车工业的迅速发展,特别是汽车电子技术的发展,我国重型车辆大多采用电喷发动机,电控自动变速箱,CAN总线及自诊断等先进技术,这些先进总成及先进技术的应用使我国重型车辆实现无人驾驶控制成为可能。
1.1 无人驾驶底盘改装要求
重型车辆区别于普通乘用车辆,根据目前实现无人驾驶后的用途及应用前景,其改装后的功能要求主要有以下几个方面:
1)无人驾驶系统可以控制车辆油门、刹车、转向、档位;
2)车辆既可以无人驾驶也可以有人驾驶,且无人驾驶模式与有人驾驶模式可以快速切换;
3)无人驾驶系统可以控制车辆的灯光、起动、熄火、喇叭;
4)无人驾驶系统可以控制车辆的全轮驱动装置,包括轮轴差、分动器;
5)无人驾驶模式车辆具有紧急停车功能;
6)无人驾驶系统能够实现汽车车速、发动机转速、档位及方向盘转角等信号的监测。
1.2 无人驾驶底盘电控化改装方案
本系统目标车型采用高压共轨电控发动机,电控液力自动变速箱,整车电子/电器系统采用多路CAN总线网络架构,具备故障自诊断能力。本系统采用 CAN总线及电控方式实现无人驾驶系统对车辆底盘的控制,其核心是采用了无人驾驶底盘控制器,该控制器采用 32位微控制器芯片,含有 4路CAN总线接口及丰富的I/O接口。系统方案如图1所示。
无人驾驶控制系统通过无人驾驶控制总线向无人驾驶底盘控制器发送油门、档位、制动、转向等控制指令,无人驾驶底盘控制器将油门等指令转换为底盘各电控系统可以识别的信号或指令,通过底盘动力总线接口或底盘各电控单元I/O进行控制,对于喇叭、电磁阀等车辆电器负载,则通过无人驾驶底盘控制器本身的功率驱动口进行控制。无人驾驶底盘控制器能够将车辆最基本的车速、发动机转速、档位及方向盘转角等信息通过 CAN总线传递给无人驾驶控制层,做到精准控制。
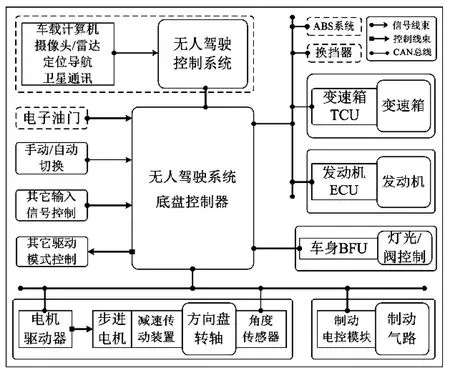
图1 无人驾驶重型车辆底盘电控化改装方案
无人驾驶车辆系统通讯采用SAE1939,控制指令采用“专有A”报文,信息报文采用SAEJ1939-71规定的标准SPN,如信息无定义则可自主定义SPN。根据SAE1939定义及控制器功能,系统对控制器都规定了源地址如表1。

表1 无人驾驶车辆系统控制器源地址分配
1.3 发动机油门控制
目标车辆的发动机电控系统具有完善的第三方总线控制接口及I/O接口。无人驾驶对发动机的控制主要是对发动机油门的控制。根据发动机控制功能的开放程度,本方案采用总线方式直接对发动机油门进行控制,控制协议遵循SAEJ1939-71。底盘控制器直接向发动机ECU转发无人驾驶控制系统发出的油门开度控制指令。
无论车辆处于有人驾驶模式或无人驾驶模式,无人驾驶控制系统都能够接收底盘控制器转发的有关发动机的重要信息,可实现对发动机运转状况进行实时远程监测,同时当发动机出现故障时,还可以远程故障诊断。
1.4 变速箱档位控制
目标车辆采用的电控液力自动变速箱,其电控单元支持双换挡机构控制器(主换挡器和辅换挡器),且为总线控制方式,主换挡控制器的源地址为0x05,辅换挡控制器的源地址为0x06。
换挡器选择开关用于告知变速箱换挡操作由哪个换挡器控制,换挡器选择开关由底盘控制器驱动换挡器选择继电器来实现。当车辆处于有人驾驶模式时,换挡器选择继电器断开,变速箱电控系统响应主换挡器发出的报文;当车辆处于无人驾驶模式时,底盘控制器驱动换挡器选择继电器闭合,变速箱电控系统响应辅换挡器发出的报文,此时,底盘控制器接收无人驾驶控制总线上传输的换挡信息并向变速箱电控单元传输换挡信息。如果要在双换挡器之间进行切换时,两个换挡器都必须处于空档且车辆静止。
同样,无人驾驶控制系统接收变速箱的重要信息,实现对变速箱运转状况进行远程监测,同时当变速箱出现故障时,可以远程故障诊断。
1.5 制动控制
为了实现无人驾驶控制系统对重型车辆制动系统的控制,必须进行制动系统电控化改装。系统采用国内技术成熟可靠的EBS系统。行车制动方面,在前桥制动回路中串入单模块电控继动阀,用双模块电控继动阀取代传统后桥制动回路中的气控继动阀,同时电控继动阀保留了传统气控方式;驻车制动方面,在传统的驻车制动回路并入脉冲式电磁开关阀。
当车辆处于有人驾驶模式时,底盘控制器不使能EBS系统,EBS保持原有的控制逻辑。处于无人驾驶模式时:行车制动方面,底盘控制器通过无人驾驶控制总线接收无人驾驶控制系统发出的刹车踏板位置报文,底盘控制器按照规定的协议解析刹车踏板位置报文,控制EBS控制器进而控制底盘电控继动阀使车辆制动。同时电控继动阀上集成有压力传感器用来监测制动气室压力,底盘控制器采集压力传感器的值并通过无人驾驶控制总线传输制动压力信息;驻车制动方面,底盘控制器接收到无人驾驶控制总线上发送的解除手刹指令时,底盘控制器控制电磁开关阀通气,反之则控制电磁开关阀断气。
1.6 转向控制
由于目前车辆的转向系统机构还无法实现线控方式,必须采取硬连接,因此无人驾驶重型车辆转向系统还需采用机电控制系统进行转向控制,但是部分部件可以实现总线控制。
系统方案中伺服电机外接行星减速器与转向管柱机械连接,电机驱动器控制伺服电机转动带动转向管柱转动,实现对无人驾驶越野车辆的转向控制。当车辆处于无人驾驶模式,电机驱动器通过无人驾驶控制总线接收目标转向角度及转动方向信息,同时通过总线接收角度传感器发出的实际方向盘角度信息,通过计算后驱动电机转动达到目标转向角度;当车辆处于有人驾驶模式时,电机不通电,电机可跟随方向盘进行转动。
电机驱动器是无人驾驶车辆转向系统的核心,该驱动器采用16位飞思卡尔微控制器芯片,含电机驱动模块、电流检测模块、CAN驱动模块。在电机的控制策略上,采用双闭环PID控制,外环为位置环、内环为电流环,这样能够确保转向系统准确、快速、平稳的要求。
1.7 底盘电器控制
无人驾驶控制系统对底盘电器控制主要包括起动、熄火、灯光及电磁阀控制。系统通过在原有车型上增加转换式继电器实现无人驾驶控制系统对车辆底盘电器的控制,同时,为了采集车身信息,底盘控制器需连接到底盘车身总线上,将车辆底盘车速、气压、油量信号打包成 CAN报文发送至无人驾驶控制总线上供无人驾驶顶层控制使用。系统对底盘电器控制的改装方式无须更改原有车辆车身控制器的控制协议,只需增加控制线路转换继电器来进行控制信号切换。
无人驾驶控制系统对发动机起动及熄火控制主要通过动力总线采用事先定义的起动、熄火 CAN指令直接控制发动机ECU,达到发动机起动、熄火的目的。
系统对车身信息的采集是通过底盘控制器间接转发CAN报文的方式实现,底盘控制器充当网关对CAN信息进行过滤,只对所需的信息进行打包重组,最后发送至无人驾驶控制总线上供无人驾驶控制使用,其优点在于:减轻无人驾驶控制总线上的负载率,确保总线通讯顺畅。
1.8 控制报文汇总
系统中CAN通讯采用SAE1939协议,控制报文采用“专有 A”报文,结合 SAEJ1939-71,系统控制报文信息如表 2所示。

表2 无人驾驶控制系统控制报文汇总
2 结论
本文首先对重型车辆底盘无人驾驶改装现状进行了研究,通过对重型车辆无人驾驶改装要求进行分析,设计了重型车辆底盘无人驾驶电控化改装的技术方案,实现了对发动机油门、起动、熄火的控制,对变速箱档位的控制,对转向系统的控制,对重型车辆制动系统的控制以及对底盘电器的控制。通过设计合理的 CAN总线网络架构,实现无人驾驶控制系统对动力系统状态的检测、对车身系统压力、油量、车速等重要信息的监测以及无人驾驶控制系统对底盘的控制。
与以往基于机电系统的改装方案相比,基于电控化及总线化的重型车辆无人驾驶改装方案具有如下优势:
1)简化了系统复杂度,提高了系统可靠性,节省了驾驶室宝贵的安装空间。
2)省去了以往车型改装需要进行的大量机电系统设计工作,只需更改部分通讯协议,即可实现无人驾驶系统在不同车型之间的移植,具体较强的适应性。
3)无人驾驶系统通过车辆总线可以获得车辆底盘丰富的数据,这些数据可以用于修正无人驾驶的智能控制策略,有助于提高无人驾驶重型车辆的整体性能。
[1] Vehicle Application Layer-SAE J1939/71.SAE.2008.
[2] CX28.CX31和CX35公路用变速箱应用与安装指南(电气).卡特彼勒,2010.
[3] 潍柴WISE15电器匹配手册.潍柴动力,2014.
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年9期)2022-05-20
电子制作(2019年22期)2020-01-14
中国外汇(2019年11期)2019-08-27
雷达与对抗(2019年4期)2019-03-10
汽车实用技术(2018年20期)2018-10-26
中小企业管理与科技·中旬刊(2017年5期)2017-06-06
科技视界(2016年6期)2016-07-12
