风速不确定度的分析和计算
2018-03-04 12:20:24马友林
风能 2018年8期
文 | 马友林
本文主要描述了IEC 61400-12-1 Annex D 和Annex E中不确定度(Uncertainty)相关部分的处理计算,主要包含以下三个部分:
(1)不确定度的基本概念。
(2)IEC 61400-12-1不确定度介绍。
(3)IEC 61400-12-1风速测试不确定度。
本文主要遵循以下标准的相关内容(下称“标准”):IEC 61400-12-1:2017, Wind turbine-Part 12-1: Power performance measurements of electricity producing wind turbines。
不确定度的基本概念
测量不确定度意指根据所用到的信息,表征赋予被测量值分散性的非负参数。测试不确定度是基于被测量的概率分布而估计的离散程度,用标准差表示的不确定度又被称为标准不确定度。在某些情况下需要对不确定度进行更可靠的估计,即对标准不确定度乘以一个包含因子k得到扩展不确定度。
不确定度分为A、B两类,它们的本质是一样的,其区别在于获取被测量概率分布的方式不同;不能简单地用“系统误差”和“随机误差”进行区分。
A类不确定度:其概率分布是直接的,通过多次测量的方式得到的。
B类不确定度:其概率分布是间接的,通过数学模型、假定等方式得到的。
将各不确定度分量进行合并,可以得到合成不确定度。
测量模型为:
敏感系数为:
如果各分量不相关:

式中:
U(xi)为不确定度分量。
如果分量相关:

[注:不确定度的概念和计算主要参考以下标准:JJF1059.1-2012、JCGM 100: 2018 (GUM1995 with minor corrections)]。
风速不确定度
一、概述
在测试中需要使用传感器采集风速相关数据,针对不同传感器,其不确定度的计算也有所差异。一般在风电测试中,主要采用安装在测风塔上的风杯式风速计和遥感测风设备进行风信息的采集和测量。
关于各个不确定度分量,标准中已经有相关规定。表1为IEC61400-12-1,2017版中附录D所列的不确定度分量。
由表1可知,IEC61400-12-1功率测试中考虑的不确定度可以分为图1所示的几类。

图1 风速不确定度的分类
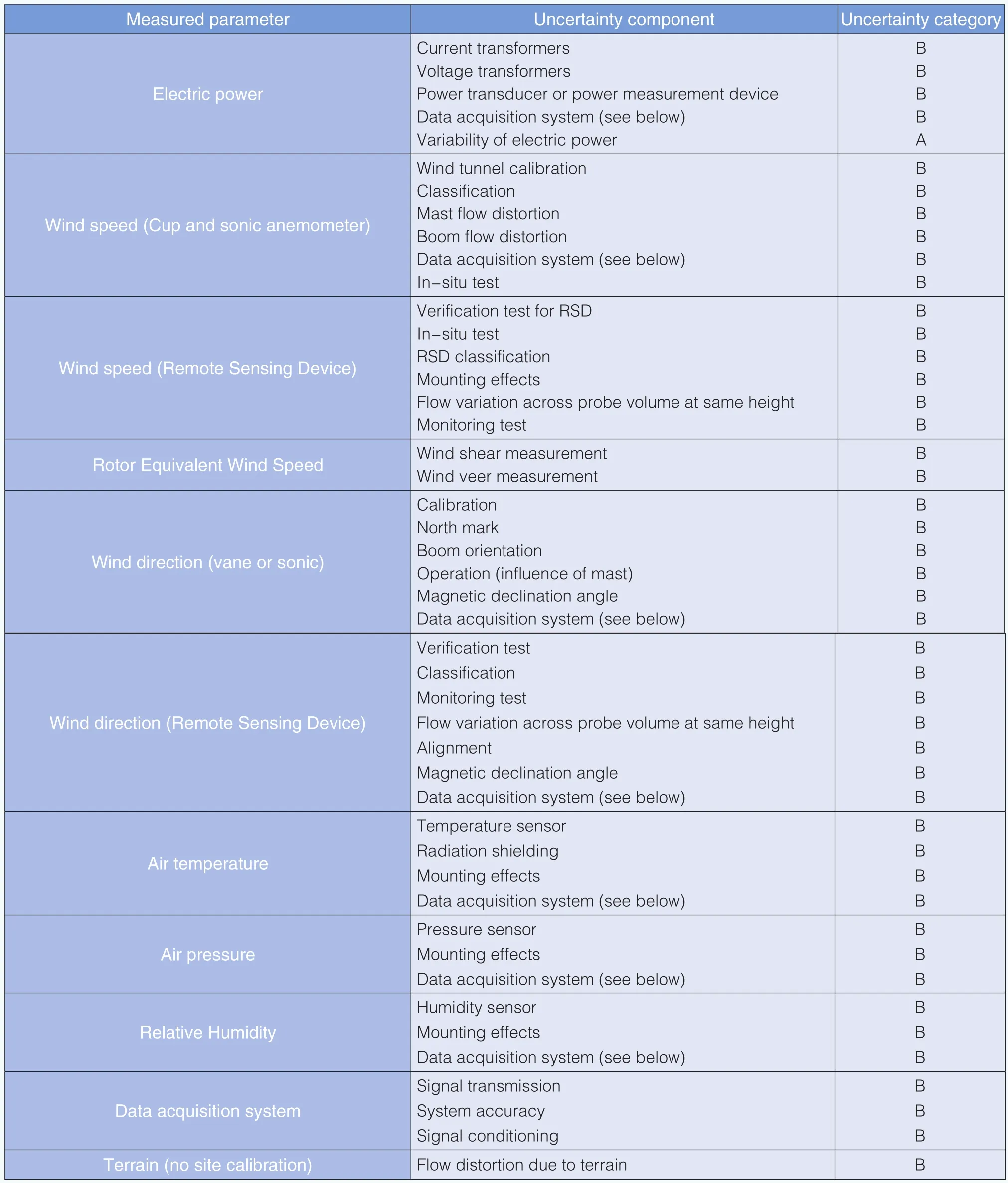
表1 数据筛选原则
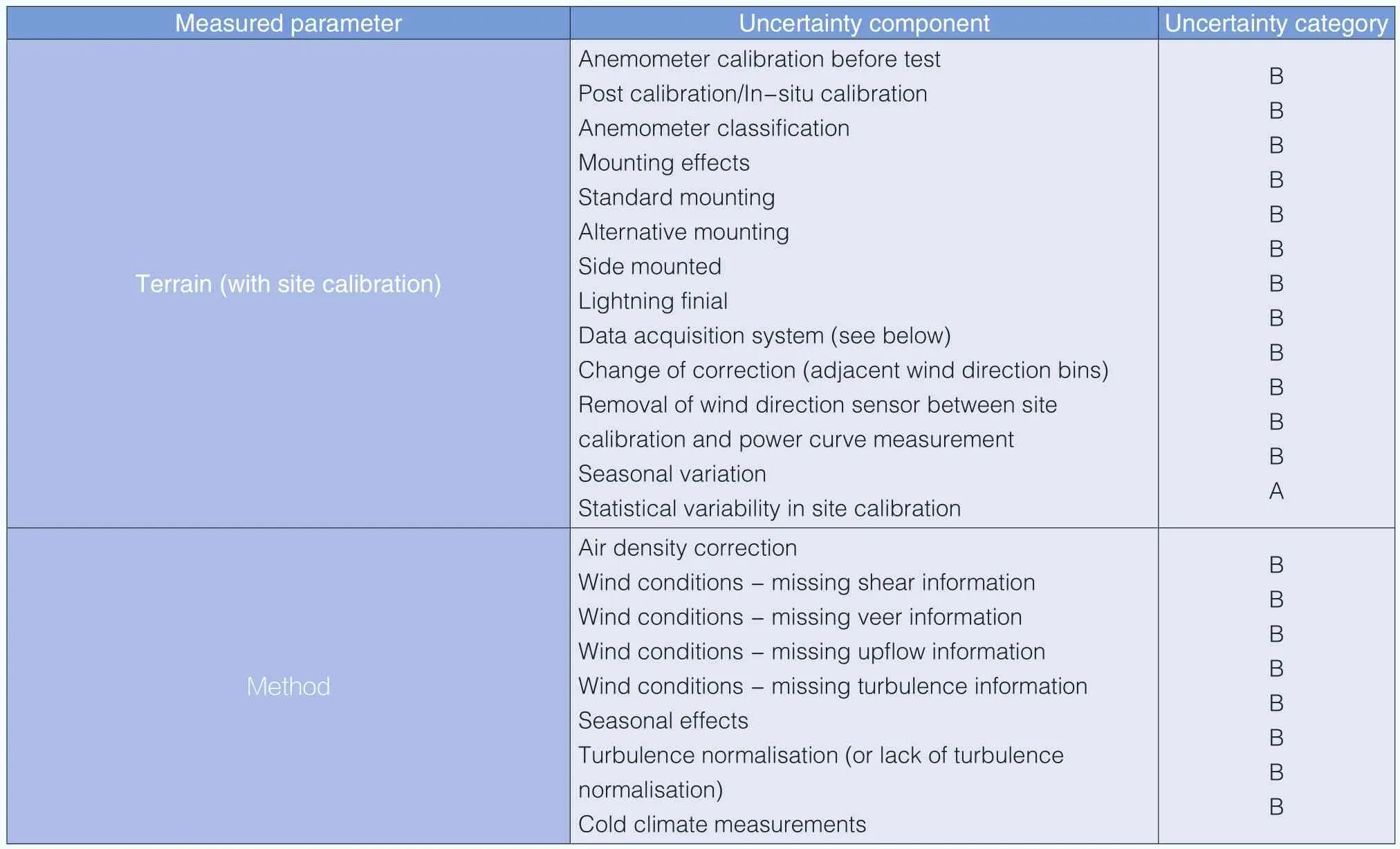
Measured parameter Uncertainty component Uncertainty category Terrain (with site calibration)Anemometer calibration before test Post calibration/In-situ calibration Anemometer classification Mounting effects Standard mounting Alternative mounting Side mounted Lightning finial Data acquisition system (see below)Change of correction (adjacent wind direction bins)Removal of wind direction sensor between site calibration and power curve measurement Seasonal variation Statistical variability in site calibration BBBBBBBBBBBBA Method Air density correction Wind conditions - missing shear information Wind conditions - missing veer information Wind conditions - missing upflow information Wind conditions - missing turbulence information Seasonal effects Turbulence normalisation (or lack of turbulence normalisation)Cold climate measurements BBBBBBBB
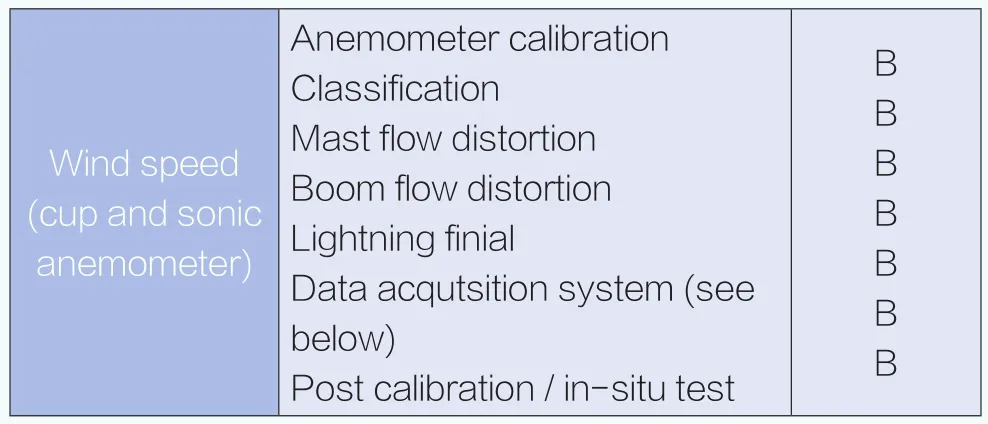
表2 风杯式风速计所需计算的不确定度

表3 遥感测风设备所需计算的不确定度

表4 风速测量不确定度分量
风杯式风速计和遥感测风设备的不确定度在大类别上并没有太大的差异,但是由于设备不同,其计算方法有较大的区别。因此,在计算不确定度时,有必要将风杯式风速计和遥感测风设备的不确定度分别计算。根据标准,风杯式风速计和遥感测风设备的不确定度分量见表2和表3。
二、风杯式风速计不确定度的计算
1.概述
参照标准,风速测量的不确定度分量见表4。
风速测试的合成不确定度按照以下公式进行计算:

式中:
uVS,precal,i—风速计标定所产生的不确定度;
uVS,postcal,i—采集器现场/后标定的不确定度;
uVS,class,i—风速计分级所产生的不确定度;
uVS,mnt,i—风速计安装所产生的不确定度;
uVS,lgt,i—避雷针所产生的不确定度;
uVS,mnt,i—风速计安装所产生的不确定度;
udVS,i—采集系统的不确定度。
2.标定不确定度
在风速测试的合成不确定度计算公式中,uVS,precal,i为风速计标定所带来的不确定度,如图2所示。
通过风速计的校准证书,可以查看校准实验室资质、校准日期和风速计信息,如图3所示。
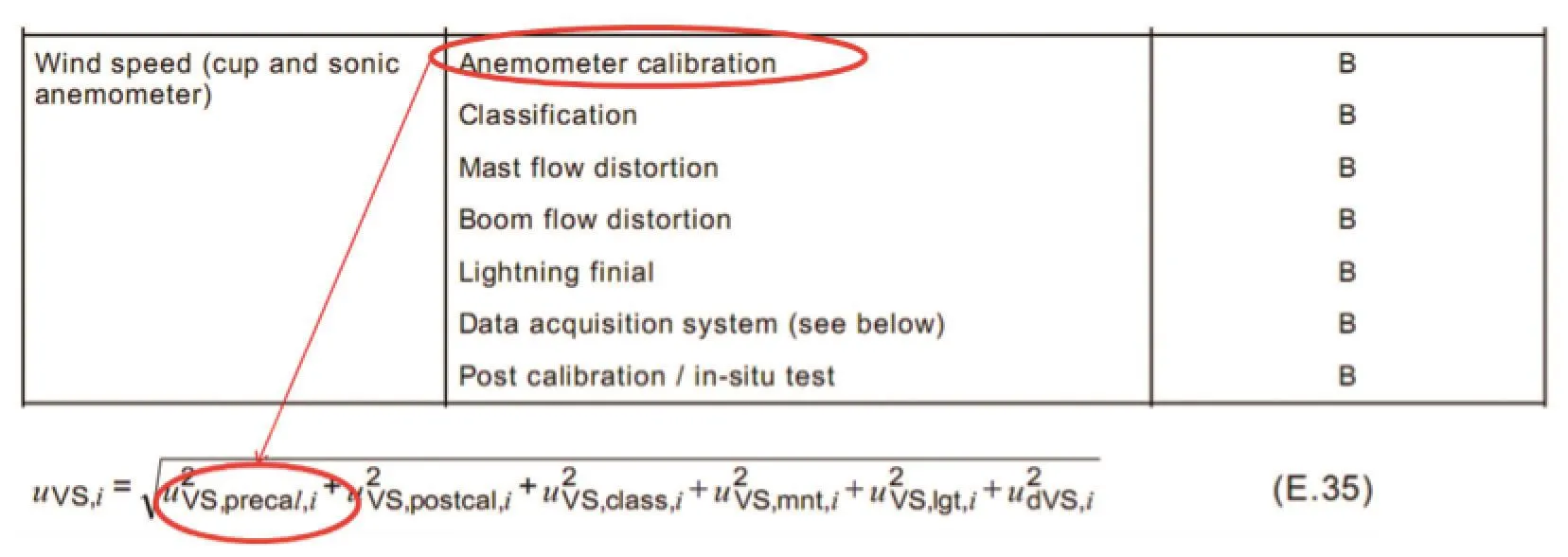
图2 风速计标定不确定度

图3 风速计校准证书1
通过风速计的校准证书,还可以查看执行标准、支撑杆的直径,如图4所示。
同时,风速计标定不确定度也可以从标定报告中获取。在这里,标准不确定度uVS,precal,i可以取成(0.05m/s)/k=0.025m/s,如图5所示。
3.风速计运行特性(分级)不确定度
在风速测试的合成不确定度计算公式中,uVS,class,i为风速计运行特性(分级)不确定度。
IEC61400-12-1附录I和附录J中列出了风速计分级测试的相关要求。温度、入流角、湍流度、空气密度等在测试周期内都会发生变化,因此,风速计将在不同的环境条件下运行,并会受到环境变化的影响。而风速计分级的目的是得到风速计在不同环境条件下的运行特性,并在数据处理中考虑运行特性带来的不确定度,如图6与图7所示。

根据不同的使用环境应用对应的分级系数k计算不确定度。
例如,10m/s的风速,使用A1.8的分级结果,对应的运行不确定度为:

4.风速计安装不确定度
在风速测试的合成不确定度计算公式中,uVS,mnt,i为风速计安装所产生的不确定度,如图8所示。
风速计安装不确定度可参照标准中的默认值进行计算,如表5所示。
5.避雷针不确定度
在风速测试的合成不确定度计算公式中,uVS,lgt,i为避雷针所产生的不确定度,如图9所示。按照标准要求,避雷针不确定度的默认值为 0.1% ~ 0.2%。
6.采集系统不确定度
在风速测试的合成不确定度计算公式中,udVS,i为采集系统的不确定度,如图10、图11所示。
7.后标定/现场标定不确定度
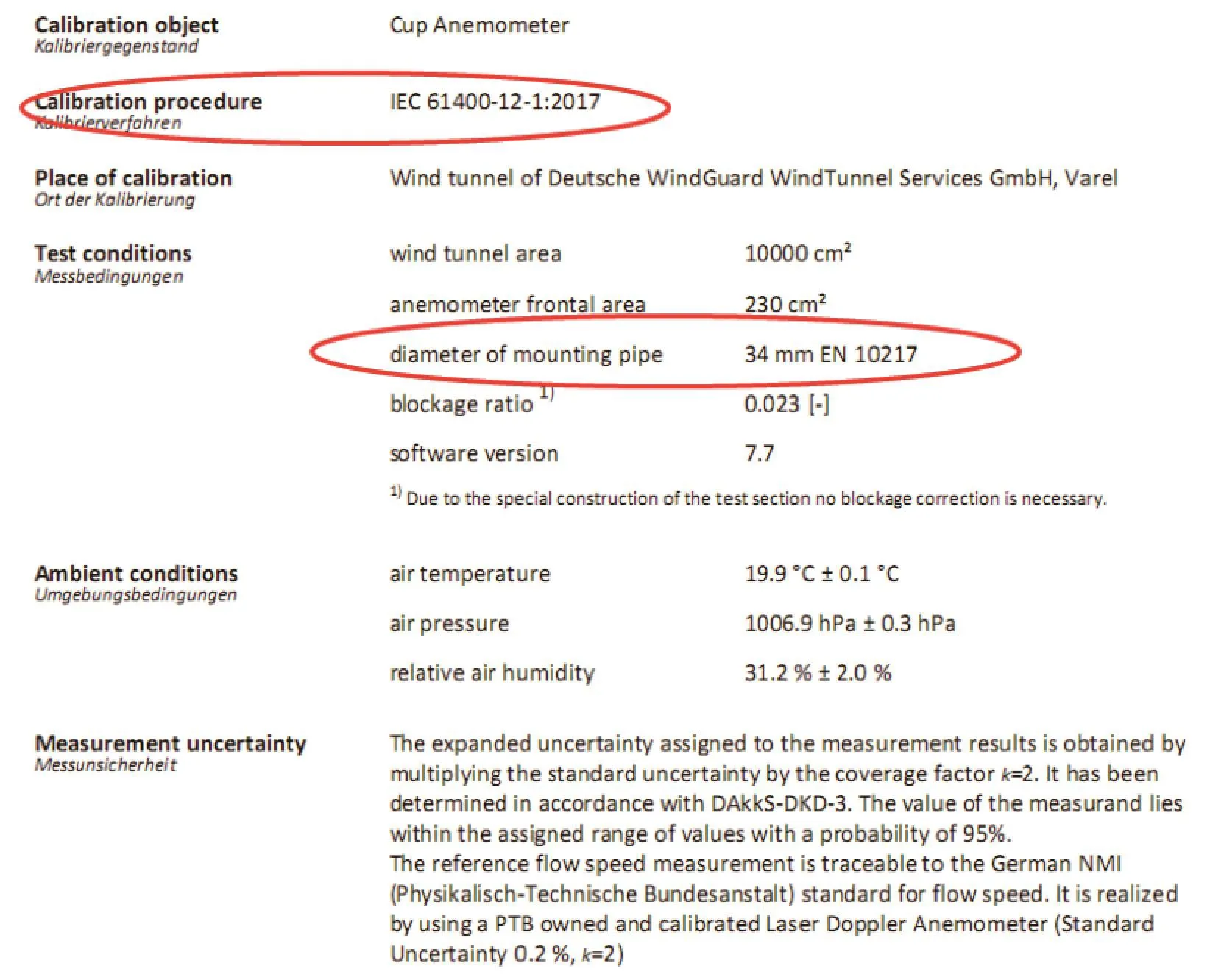
图4 风速计校准证书2
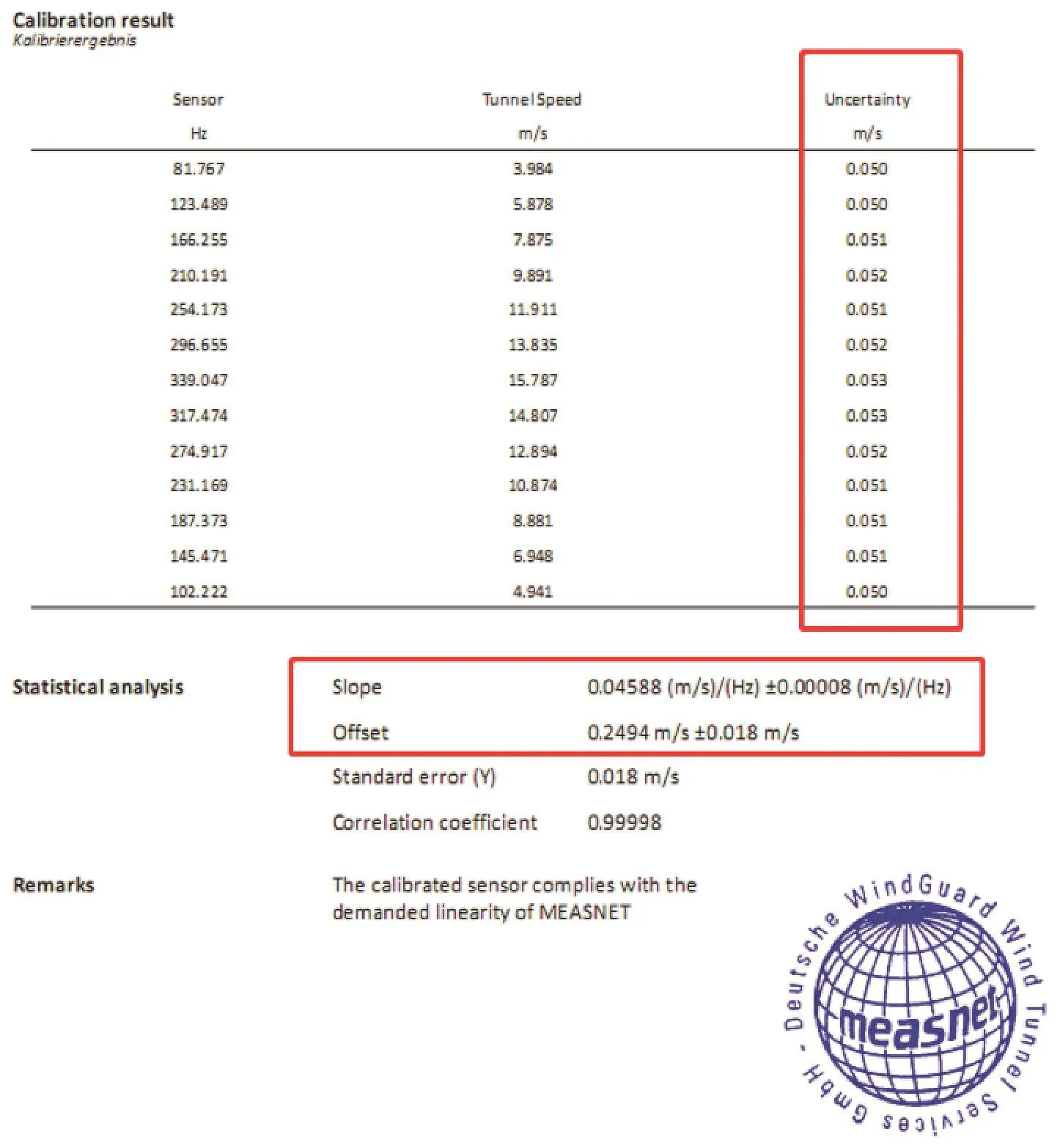
图5 风速计校准证书3
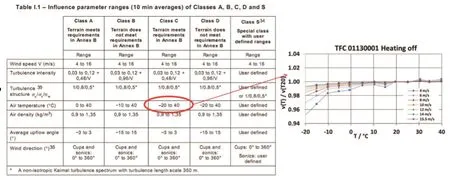
图6 温度变化对测试结果的影响
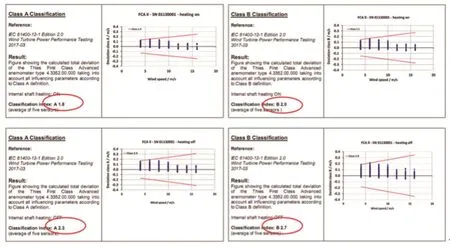
图7 分级测试结果
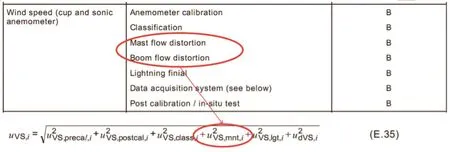
图8 风速计安装不确定度
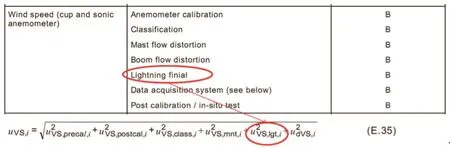
图9 避雷针不确定度
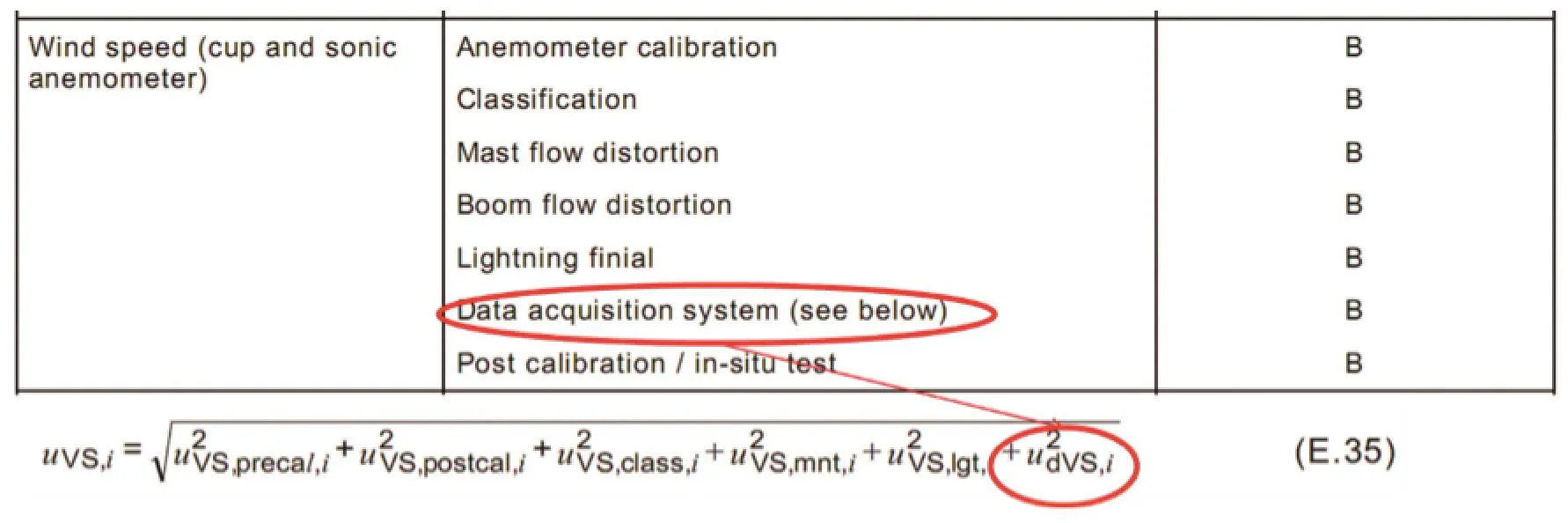
图10 采集系统不确定度
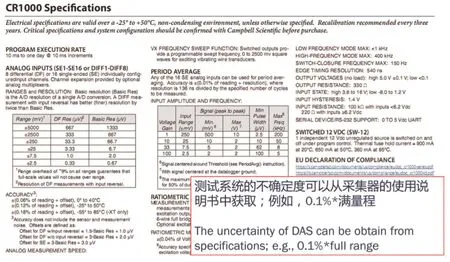
图11 采集器使用说明书

表5 风速计安装的不确定度
在风速测试的合成不确定度计算公式中,uVS,postcal,i为采集器后标定/现场的不确定度,如图12所示。
利用以下公式进行计算:
通过风速比对可以得到现场标定风速比对关系,如图13所示。
如果进行了后标定:不确定度可以估计为4~12m/s范围内两次标定差异的最大值,上限为0.2m/s。
如果进行了现场标定:不确定度可以估计为4~12m/s范围内最大的δ值,上限为0.2m/s,如图14所示。
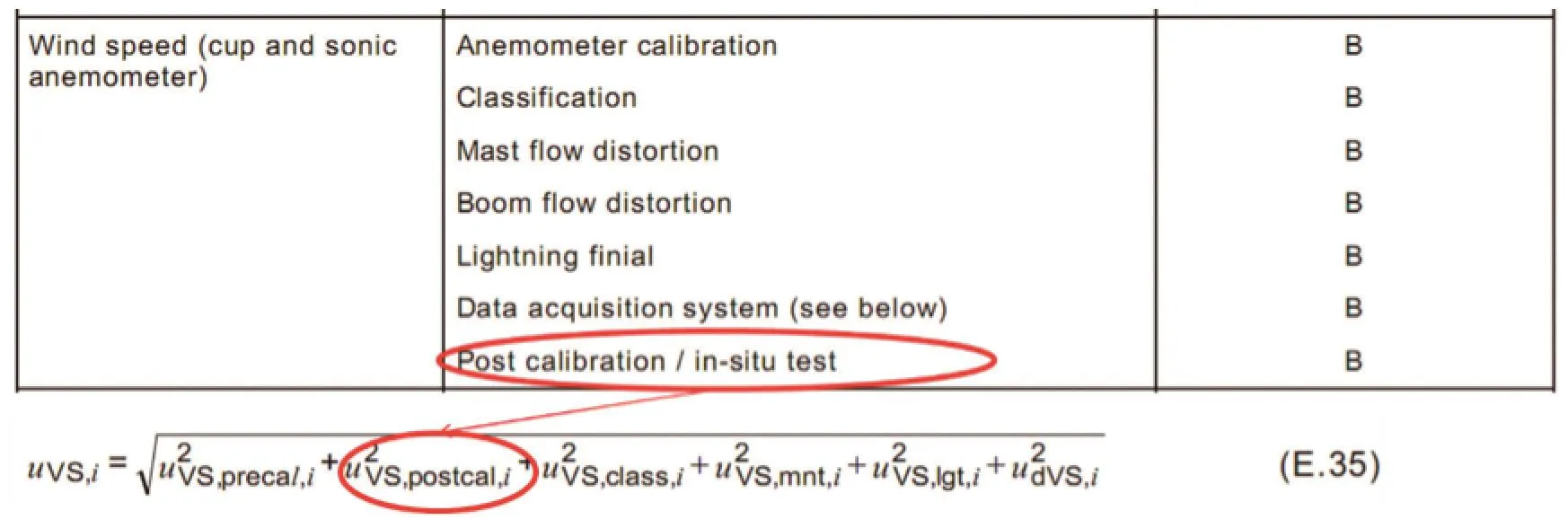
图12 后标定/现场的不确定度
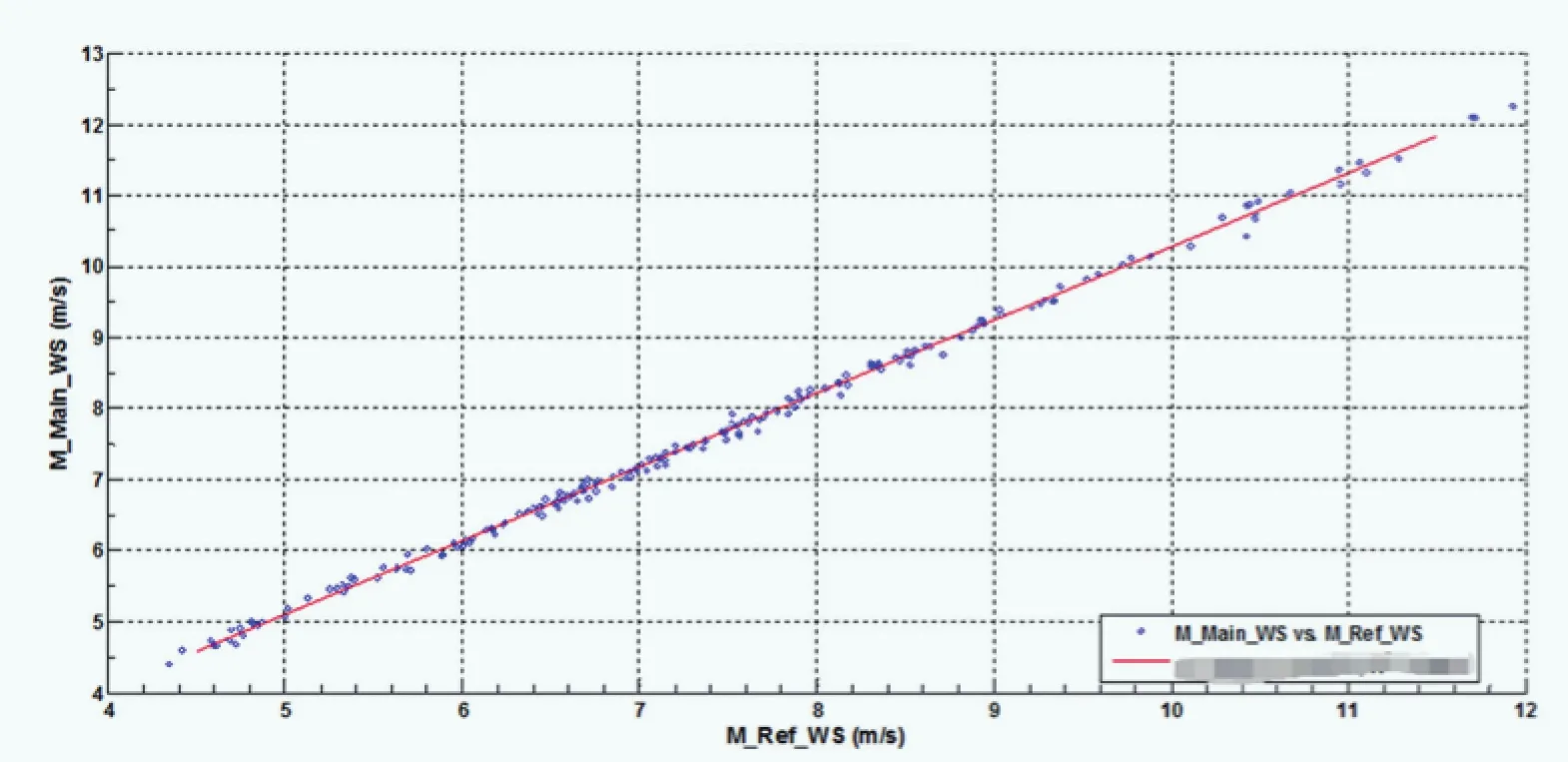
图13 现场标定风速比对关系
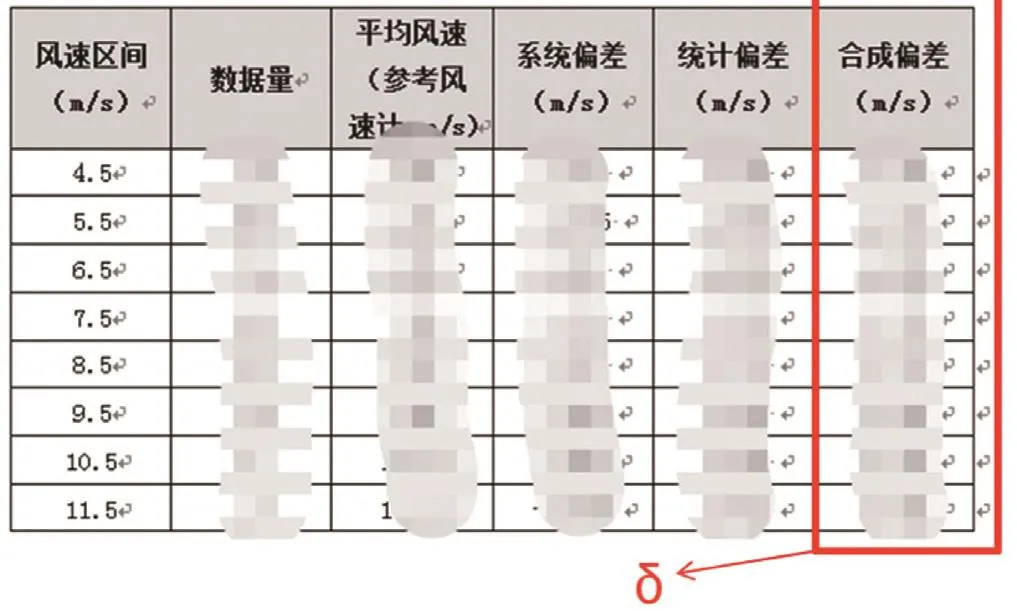
图14 风速计in-situ不确定度
8.风速测量合成不确定度
按照以上的方法,可以得到风速不确定度的各个分量,由各个分量可以合成总的风速不确定度,如图15所示。
至此,风速测量不确定度的计算工作已经完成。
三、遥感装置不确定度
1.概述
在标准附录L中,有与遥感装置相关的叙述。附录L是一个规范性附录,也就是附录中的要求都是必须要遵守的。
附录L描述了对远程风速测试装置(RSD)的操作要求,例如光雷达(LIDARS)和声雷达(SODARS)。
附录L中规定了一个流程:确保测量的可追溯性符合国际标准并用于功率曲线评估的相关不确定性分量。
附录L包含以下内容:
(1)L.1 General;
(2)L.2 Classi fi cation of remote sensing devices;
(3)L.3 Verification of the performance of remote sensing device;
(4)L.4 Evaluation of uncertainty of measurements of remote sensing devices;
(5)L.5 Additional checks;
(6)L.6 Other requirements specific to power curve testing;
(7)L.7 Reporting。
2.遥感装置不确定度的主要分量
遥感装置不确定度主要包含图16所示的几个部分。
通过以下公式可以求出遥感装置的不确定度:
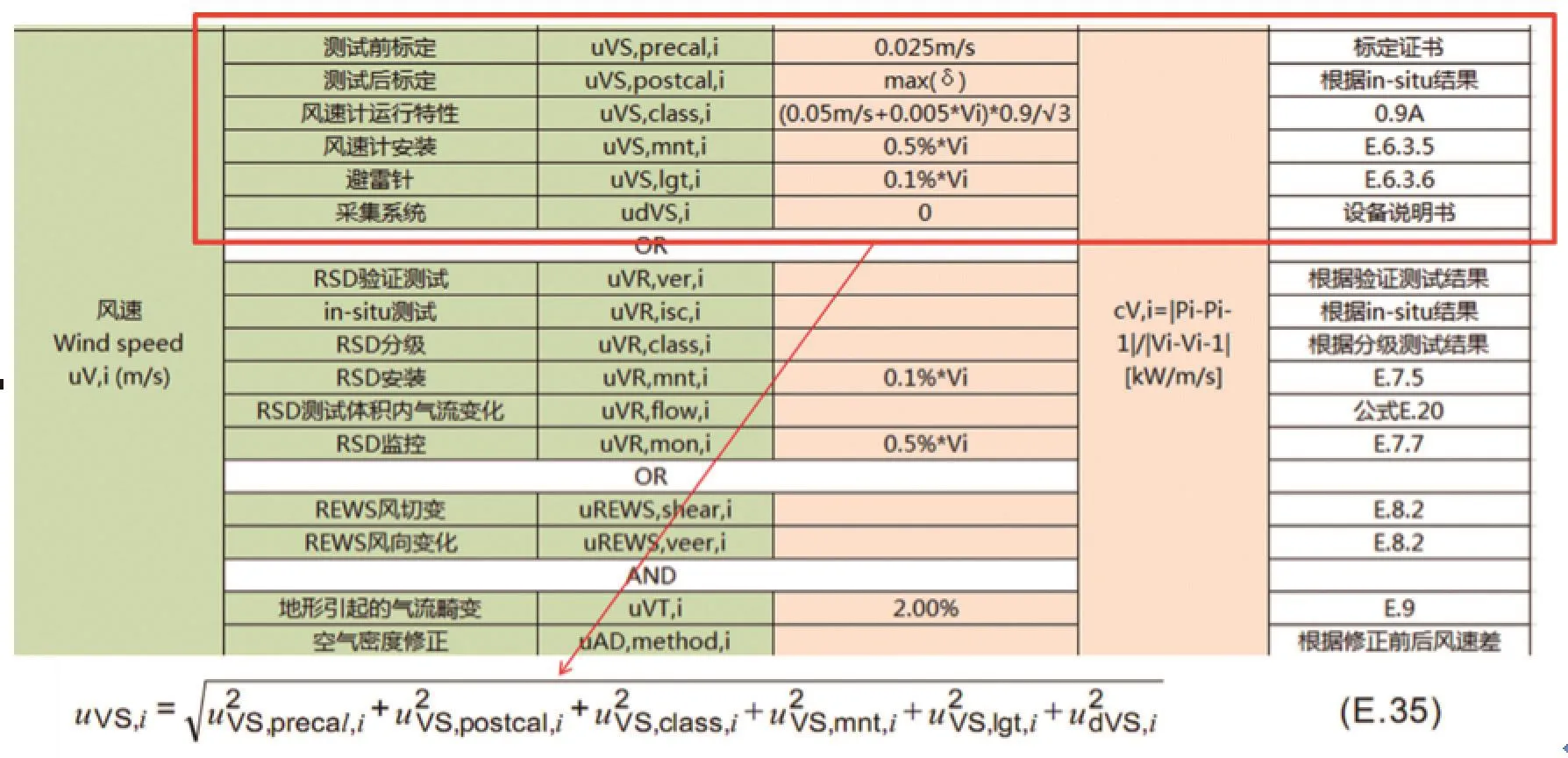
图15 风速测量不确定度的计算
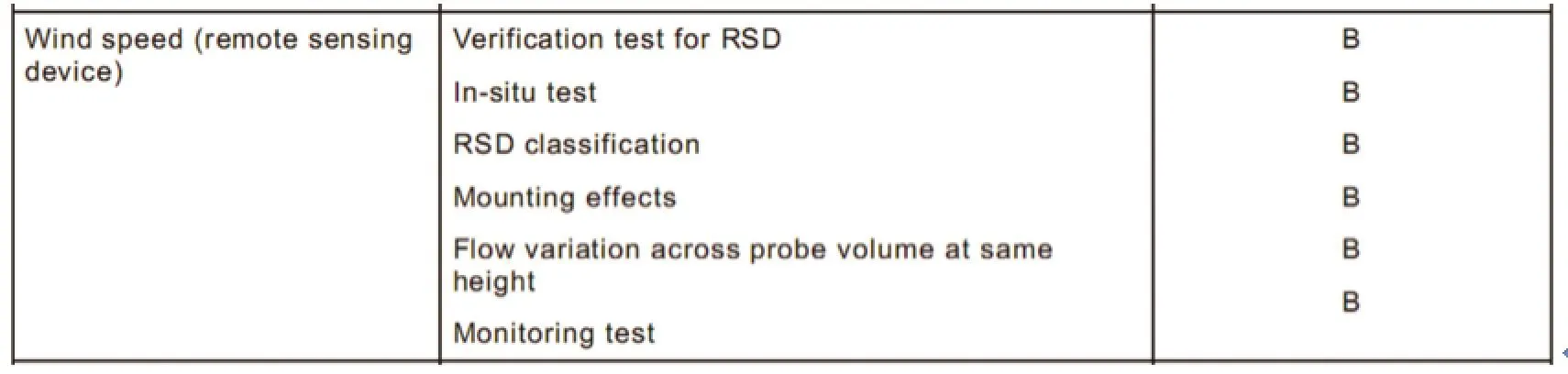
图16 遥感装置不确定度

式中:
uVR,ver,i—RSD验证的不确定度;
uVR,isc,i—RSD现场标定的不确定度;
uVR,class,i—RSD分级的不确定度;
uVR,mnt,i—RSD安装的不确定度;
uVR,flow,i—RSD安装的不确定度;
uVR,mon,i—RSD安装的不确定度。
3.RSD验证和分级不确定度
在遥感装置不确定度计算公式中,uVR,ver,i为RSD验证的不确定度,uVR,class,i为RSD分级的不确定度,如图17所示。
若要计算RSD验证和分级不确定度,必须先了解RSD的验证和分级测试。参照标准中的要求,遥感装置(RSD)使用时须遵循图18所示的流程。
RSD需要经过分级和验证后才可以在测试中使用。通过分级测试,可以得到环境因素对遥感设备的影响大小,即敏感性。同时,可以得到独立变量对于遥感设备的精度计算结果。结合相关结果,得到最终的不确定度,如图19-图21。
4.RSD安装不确定度
在遥感装置不确定度计算公式中,uVR,mnt,i为RSD安装的不确定度1,如图22所示。参照标准,该不确定度的默认值为0.1%。
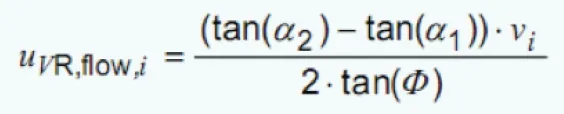
在遥感装置不确定度计算公式中,uVR,flow,i为RSD安装的不确定度2,如图23所示。
参照标准,该不确定度的默认值为2%~3%,可按照以下公式进行计算:
在遥感装置不确定度计算公式中,uVR,mon,i为RSD安装的不确定度3,如图24所示。参照标准,该不确定度默认值为0.5%。
5.RSD现场标定不确定度
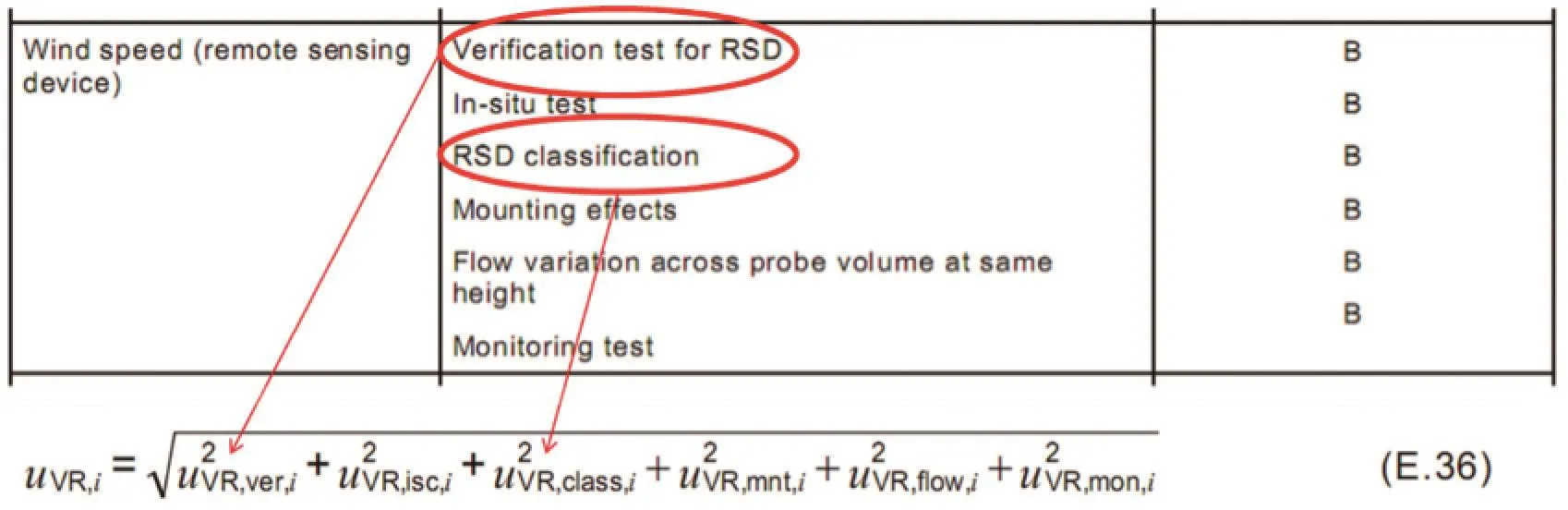
图17 RSD验证和分级不确定度
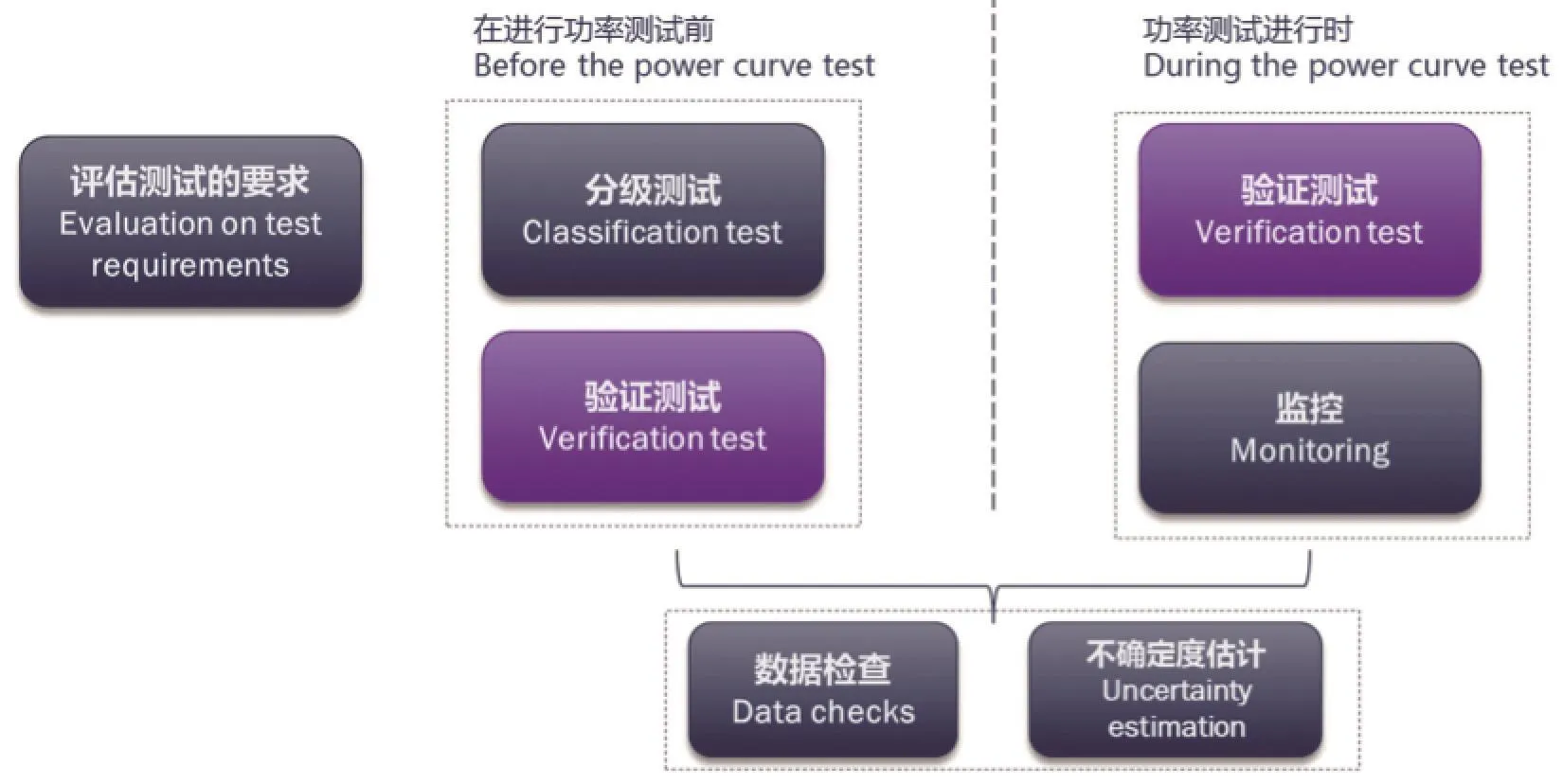
图18 RSD使用流程

图19 精度计算方法

图20 IEC标准中的案例
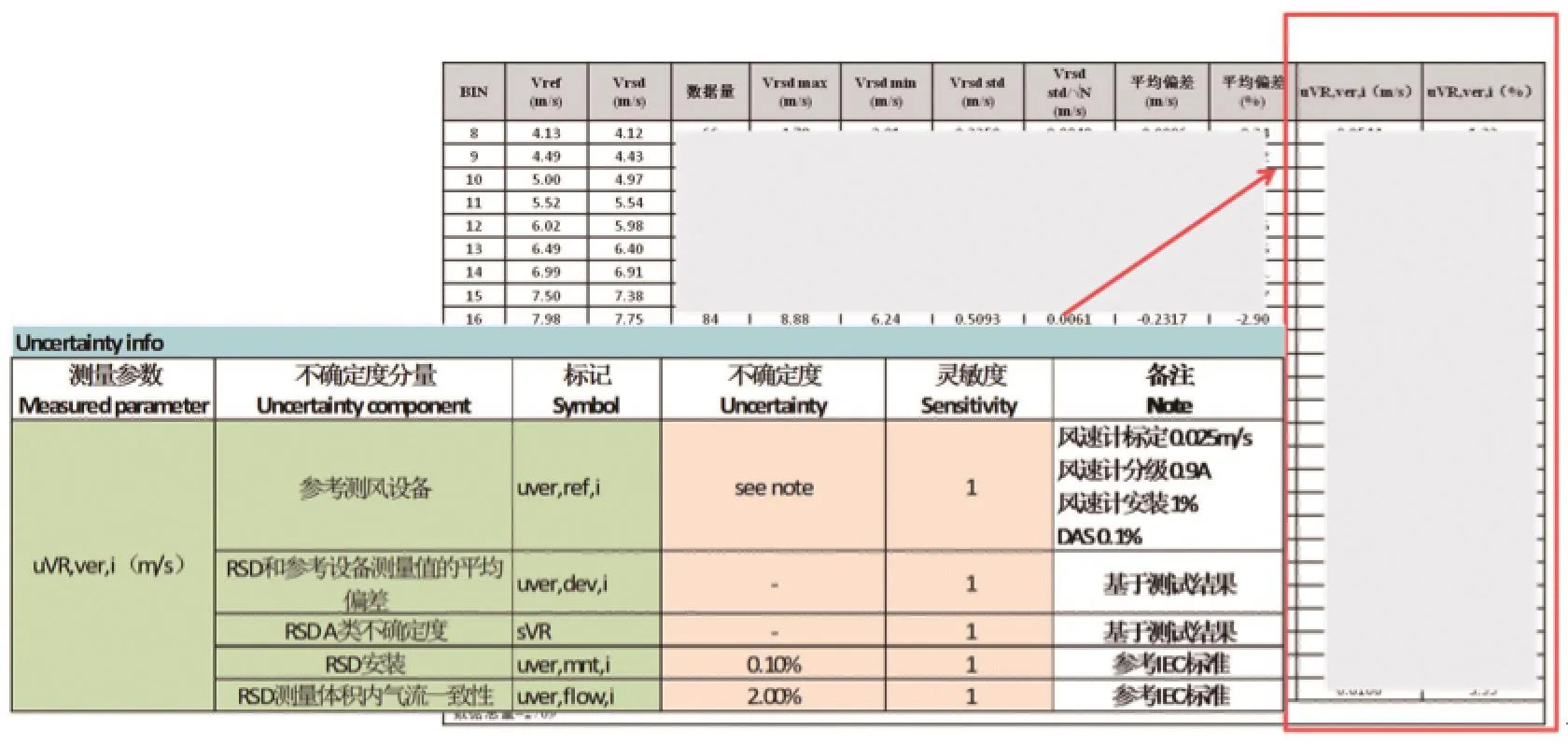
图21 遥感装置不确定度的计算
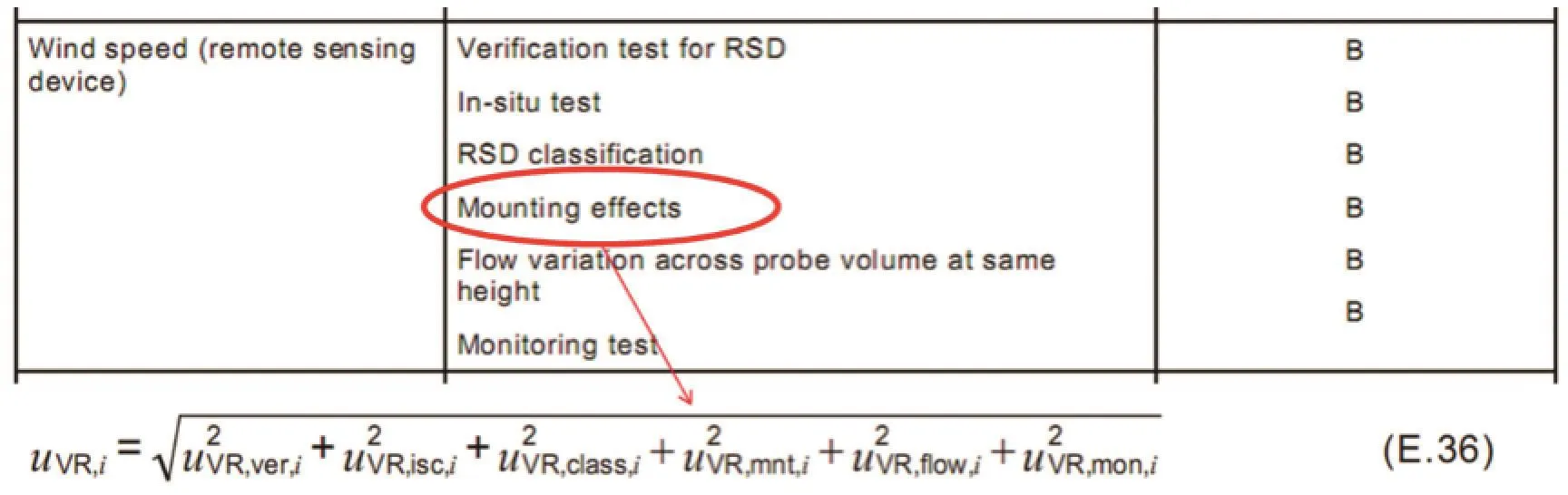
图22 RSD安装不确定度1
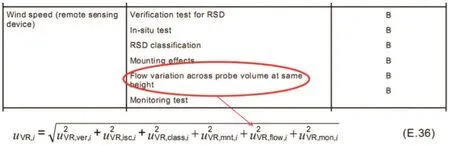
图23 RSD安装不确定度2

图24 RSD安装不确定度
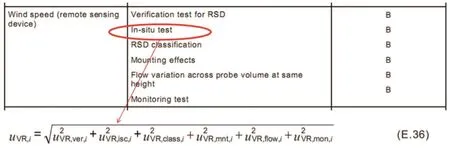
图25 RSD现场标定不确定度

图26 RSD合成不确定度计算表
关于RSD现场标定,标准附录K中有详细描述,相关信息如图25所示。
6.RSD合成不确定度
RSD合成不确定度计算表如图26所示。
至此,RSD的不确定度计算完毕。
综上,实际测试和分析中,需要根据实际情况,先求取不确定度的分量,再合并成最终的合成不确定度。

摄影:王鹏岳
猜你喜欢
防爆电机(2022年4期)2022-08-17 05:59:50
基层中医药(2021年12期)2021-06-05 06:56:26
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国眼镜科技杂志(2019年9期)2019-11-11 12:15:26
智族GQ(2019年9期)2019-10-28 08:16:21
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
纺织科学研究(2017年6期)2017-07-03 12:14:15
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38