推进轴系橡胶艉轴承刚度等效研究
2018-03-03 03:50:13徐颖蕾张志谊
噪声与振动控制 2018年1期
徐颖蕾,张志谊,2
(1.上海交通大学 机械系统与振动国家重点实验室,上海 200240;2.上海交通大学 高新船舶与深海开发装备协同创新中心,上海 200240)
橡胶轴承由于其减振性能良好,越来越广泛地应用于船舶轴系[1]。在轴系计算中,通常将橡胶艉轴承简化为一个弹性支承,其刚度由经验或试验得出,简化模型的计算结果与实际情况有时相差较大。同时,橡胶材料具有非线性,橡胶艉轴承对于轴系分析计算的影响更大,因此对于艉轴承支承刚度等效的准确度要求更高[2]。
对于橡胶轴承刚度的研究,主要集中在对轴承本身进行建模和分析,如张圣东运用有限元法和线性回归拟合出艉轴承静刚度计算参数,验证了静刚度计算公式的有效性[3]。熊晨熙通过有限元软件中的非线性接触分析计算了轴承等效质量和等效刚度[4]。Liu Shibing利用实验动态参数建立了考虑空间分布力的WLRBs模型[5–6]。Hargreaves D从理论上得出了3个轴向槽的水润滑轴承的稳态和动态旋转特性[7]。Pai R S研究了6个轴向槽的水润滑轴承非线性瞬态特性[8]。张敏将艉后轴承简单等效为4个等刚度的均布支承[9]。当考虑艉后轴承与轴系耦合时,计算模型复杂,因而有必要对轴承进行适当简化,在保证精度的前提下提高计算效率。但是,等效处理需要考虑轴承与轴系的相互作用,在考虑实际载荷分布和变形的条件下,等效才是准确的。
为提高艉后轴承简化支承模型的计算精度,本文提出一种推进轴系橡胶艉轴承支承刚度等效方法,并将简化模型的计算结果与转轴-轴承耦合模型的计算结果进行对比,以验证等效方法的有效性。
1 转轴-轴承系统有限元模型
1.1 轴承有限元模型
在转轴-轴承系统的有限元模型中,艉轴承的有限元模型非常重要。艉轴承由外层铜质外衬、内层橡胶轴瓦以及轴瓦内金属板条三部分构成,三部分均采用6面体单元划分,共划分153 120个单元,材料参数如表1所示。

表1 艉后轴承有限元参数
其中橡胶轴瓦选用非线性两参数M-R模型,Rivilin系数分别为C10=0.631 64 MPa,C01=-0.063 773 MPa[10],橡胶艉轴承的有限元模型如图1所示。

图1 艉后轴承有限元模型
1.2 转轴-轴承系统有限元模型
采用实体单元、壳单元与梁单元相结合的方式建立转轴-轴承有限元模型,如图2(a)所示。有限元计算模型由转轴、螺旋桨、艉后轴承、艉前轴承、推力轴承和弹性联轴器从动端构成。转轴与艉后轴承相接触的轴段采用壳单元建模,该轴段外表面与艉后轴承内表面建立接触对模型,如图2(b)所示,其余轴段采用梁单元建模,艉前轴承和推力轴承均简化为弹簧单元。
1.3 有限元模型求解
对艉后轴承外表面所有位移进行约束,对转轴施加重力,进行非线性接触计算,求解结果如图5所示。

图2 转轴-轴承有限元模型

图3 转轴-轴承系统静力计算结果
由结果可以看出,轴承变形及应力靠近螺旋桨端(左)最大,沿着轴向逐渐减小,至靠近电机端(右)轴承端面变形量很小。因此对于简化支承的位置及支承刚度需要根据轴承实际载荷分布和变形进行等效。
2 艉后轴承单点支承简化
将艉后轴承面接触支承方式简化为单点支承时,应使轴承力矩之和在支承点处为零,同时保证支承点处位移与转轴-轴承模型在该点的位移相等,以最大程度保证单点支承等效的精确性。
提取艉后轴承承载面y向节点力,轴承承载面受力分布如图4所示,角度坐标θ为轴承承载面节点法线与有限元模型xy平面的夹角。

图4 艉后轴承外表面节点力分布
欲求得轴承单点支承位置,即支点的轴向坐标x0,在图4中取平面x=x0,使得该平面两侧节点力力矩之和为零,记
即节点力z为x和θ函数。
则有

由此可得
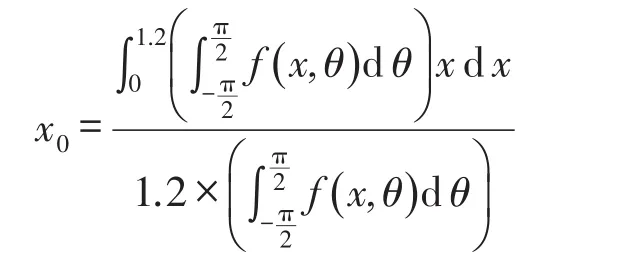
代入节点力和几何参数,求得x0=0.307 8 m,即为艉后轴承单点简化支承位置。提取1.3中轴承y向位移曲线,如图5所示。

图5 艉后轴承y向位移曲线
由曲线可得,轴承在x0=0.307 8 m处的y向变形量UY为-5.881 9×10-4m。
以梁单元建立转轴简化模型,艉前轴承和推力轴承均简化为弹簧单元,艉后轴承支点位于x0,设置该点y向位移-5.881 9×10-4m,对整个轴系施加重力求解,得到艉后轴承的支点反力

由此求出艉后轴承简化为单根线性弹簧时的刚度

以此弹簧支承对艉后轴承进行简化,计算得到轴系简化模型的重力变形,将模型简化前后各项指标进行对比,如表2所示。

表2 单点支承模型简化前后指标对比
由表2可知,取该简化弹簧支承进行分析时,所得轴系y向变形较为精确,但对于前轴承处转角,计算结果差异较大。
3 艉后轴承多点支承简化
3.1 艉后轴承多点支承静刚度等效
由单点支承计算结果可以看出,单点简化模型虽能较好地计算轴系位移,但转角计算误差较大,因此考虑对艉后轴承进行多点简化以减小转角计算误差。
将艉后轴承面接触支承方式简化为多点支承时,考虑将艉后轴承均分为5段,按照前述支承点计算方法,每段轴承的重心点设置为支承位置,采用5点支承对艉后轴承进行简化,简化示意图如图6所示。
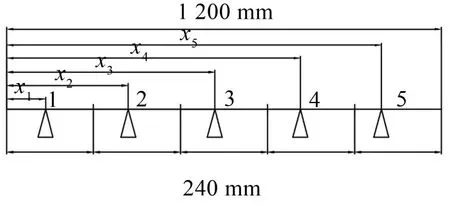
图6 艉后轴承5点支承简化示意图
经计算得每个支承点的位置为

等效时使每段轴承平均位移及受力与转轴-轴承模型相应位置的位移及受力相等。
提取每段轴承y向位移的平均值

提取每段轴承承载面的节点力之和,视为每个支承点的受力

由力与位移的比值得到5个支承的静刚度:

将简化模型中艉后轴承按照上述支承位置及支承刚度进行建模,计算得到5点支承简化模型的重力变形,将模型简化前后各项指标进行对比,如表3所示。
由表3可知,采用5点支承,艉前轴承处的位移及转角误差明显减小,推力轴承处的位移及转角误差也有所下降,但最大位移及最大转角误差略有增加,均小于10%。5点支承的刚度之和为1.616 9×108N/m,略大于单点支承的线性弹簧刚度。

表3 5点支承模型简化前后指标对比
3.2 艉后轴承多点支承动刚度等效
对轴系进行静力分析时,采用5点支承等效可以得到较为准确的结果,但对轴系进行动态响应分析时,等效的静刚度不再适用。基于3.1节的静刚度等效方式,进行5点支承动刚度等效。
在重力变形计算的基础上,在轴系螺旋桨处施加y向力F,令F从-10 000 N到10 000 N变化,间隔1 000 N,对21个工况下的轴承-转轴进行静力求解计算,提取每个工况下艉后轴段的变形数据。按照3.1节5点支承简化方法,从转轴-轴承模型计算结果中提取每段轴承的y向位移平均及每段轴承节点力,绘制出每个支承的力-位移曲线,如图7所示。
各曲线对应的拟合函数为

将重力变形中每段轴承的平均位移带入拟合函数的1阶导数,可得平衡位置各支承段的等效动刚度,约为等效静刚度的1.5~2倍:
在轴系螺旋桨处施加频率为0.5~100 Hz、大小为10 000 N的激励力,分别对轴承-转轴模型和5点简化支承模型进行谐响应分析。取轴系螺旋桨、艉后轴段最左端、艉后轴段最右端、艉前轴承、推力轴承处的响应进行对比,结果如图8所示。
由各频响曲线可以看出,5点支承动刚度模型可以较准确地描述模型各处频响曲线的共振峰值频率及幅值,对艉前轴承和艉后轴承处的高频段(大于60 Hz)反共振峰的描述有一定的误差,但简化模型在低频段(小于60 Hz)的频响与轴承-转轴模型几乎一致。

图7 5点简化模型各支承点力-位移曲线

图8 动刚度模型简化前后频响对比
5 结语
本文给出一种推进轴系橡胶艉轴承支承刚度等效方法,将计算模型较复杂的轴承-转轴非线性接触模型,简化为有限点支承模型,可用于更复杂的动力学系统。模型简化结果表明,单点支承等效可以较为准确地描述转轴位移,但转角不够准确;5点支承等效较单点支承等效具有更高的精度,可以较为准确地描述轴系变形。在5点支承静刚度等效基础上,提出5点支承动刚度等效方法,结果表明,等效后动刚度模型也能较准确地描述轴承-转轴非线性接触模型频响特性(在微幅振动条件下),尤其在低频段,与转轴-轴承接触模型的计算结果几乎一致。
[1]金勇,田宇忠,刘正林.橡胶艉轴承的试验模态分析[J].噪声与振动控制,2012,32(1):34-38.
[2]王滨.轴承刚度对船舶轴系振动特性的影响研究[J].齐齐哈尔大学学报(自然科学版),2009(6):55-60.
[3]张圣东,刘正林.船用水润滑橡胶尾轴承静刚度计算模型[J].交通运输工程学报,2013,(05):61-66.
[4]熊晨熙,谢基榕,孙凌寒.船用橡胶轴承刚度分析[J].计算机辅助工程,2014(2):99-104.
[5]LIU S,YANG B.Modeling and analysis of flexible multistage rotor systems with water-lubricated rubber bearings[C]//ASME 2014 InternationalMechanical Engineering Congress and Exposition.American Society of Mechanical Engineers, 2014: V04BT04A078-V04BT04A078.
[6]SHIBING LIU,BINGEN YANG.A new model of waterlubricated rubberbearingsforvibration analysis of flexible multistage rotor systems[J].Journal of Sound and Vibration,2015(349):230-258.
[7]HARGREAVES D,MAJUMDAR BC,PAI R.Analysis of water-lubricated journal bearings with multiple axial grooves[J].ARCHIVE Proceedings of the Institution of Mechanical Engineers Part J Journal of Engineering Tribology1994-1996(vols 208-210),2004,218(2):135-146.
[8]PAI R S.Stability of four-axial and six-axial grooved water-lubricated journal bearings under dynamic load[J].ARCHIVEProceedingsoftheInstitutionof Mechanical Engineers Part J Journal of Engineering Tribology1994-1996(vols 208-210),2008,222(222):683-691.
[9]张敏.转子—水润滑橡胶轴承轴系校中特性研究[D].哈尔滨:哈尔滨工业大学,2012.
[10]车凯凯.水润滑橡胶轴承摩擦特性及轴系振动研究[D].上海:上海交通大学,2014.
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
上海大中型电机(2021年1期)2021-06-09 09:12:06
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
山东冶金(2019年2期)2019-05-11 09:12:24
电脑爱好者(2016年23期)2017-01-05 20:39:51
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
舰船科学技术(2016年1期)2016-02-27 15:39:19