一种机械臂的力/位混合控制方法研究
2018-03-02 09:45孙海波
机电产品开发与创新 2018年1期
陈 洪,孙海波
(福建省三明市东辰机械制造有限责任公司,福建 三明 365500)
0 引言
随着时代的进步,机器人技术已经成为高科技中的一个重要组成部分,已经成为一个国家发展进步的重要指标。随着应用环境的增加,单纯的位置控制已经不能满足要求。尤其当机器人的末端执行器与环境相接触时,需要对与环境的接触力进行控制,才能达到控制精度[1]。所以,机器人的力/位混合控制已经成为机器人研究领域的热点问题。周军、丁希伦提出一种利用遗传算法来对双臂机器人进行模糊力和位置的同时控制[2]。魏立新等人为增加接触刚度不确定性的鲁棒性,设计出了一种并行控制的力控制器,具有稳定性[3]。
论文主要研究机器人在作业时,既能实现力的跟踪也能完成位置的跟踪[4]。因此这里提出一种基于零空间位置矢量的机械臂的力/位混合控制算法,该力/位混合控制方法是基于六自由度机械臂来研究的,利用零空间位置矢量优化接触力以此来改善机器人的运动特性。利用力差值性能指标,通过对力差值性能指标来优化控制,实现力/位混合控制。
1 基于零空间位置矢量的力/位混合控制算法
当机械臂末端执行器工作时,与外界环境存在自然约束,当在约束方向上进行力控制时,该方向的位置控制将不再起作用,在笛卡尔空间下,执行器的位姿控制数量将减少,此时可以基于零空间矢量对机械手臂进行优化控制,以力控制为优化对象进行控制。


式中:J+是 J的伪逆,J+∈Rn×m;I是 n×n 阶单位矩阵;(IJ+J)是零空间 N(J)的映射矩阵,φ˙∈Rn是任意矢量。
根据机械臂终端执行器与环境的接触特性,将机器人整体(包括本体和传感器等)和环境看成一个弹性系统,假设该系统的弹性系数为Ke,那么我们可以得到力的差值FC:

式中:F—给定的期望力;x—机器人运动的偏差,Kex的值可由机械臂末端的力传感器得到。

由上述可求得关节角加速度:


式中:q0—前一时刻关节角度;t—采样时间。
在迭代运行中,当力差值为零时,此时的机械手臂末端与环境的接触力恰为期望力,完成了力和位置的同时控制。
2 仿真验证
以PUMA560机械臂为例,末端期望沿着x方向保持10N的力。如图1所示,用滑块弹簧系统代表机械臂末端沿着弹簧压缩的方向进行力的控制,弹簧k=0.5N/mm,利用弹簧的变形量计算力传感器的值。机械臂末端从刚刚接触滑块时开始运动,其余的运动位姿不变,即机械臂末端的运动速度为:
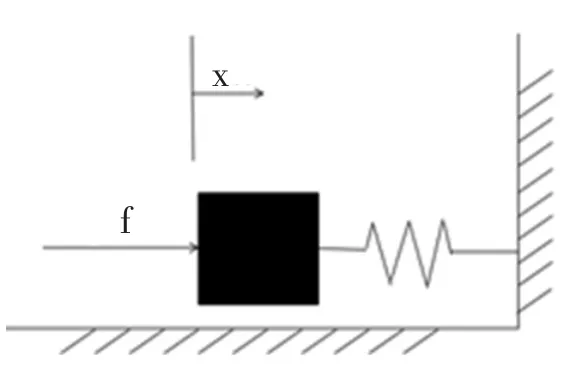
图1 滑块弹簧系统Fig.1 The system of slider-spring
由式(2)可得:

进而可知关节角速度只与零空间位置矢量有关:

零空间位置矢量只能改变x方向的速度,因此,可以保证机械臂末端沿着x方向运动。φ˙只有x项有力差值,即φ˙=[Fx 0 0 0 0 0]T。力差值为期望值与弹簧的弹力之差。
通过Matlab仿真,得到机械臂末端位置曲线,如图2所示。从图中的机械臂末端位置跟踪曲线可以知道:经过6次迭代,机械臂末端到达位置20mm,此时弹簧的弹力为10N,即机械臂对弹簧施加的力,与期望力大小相同。
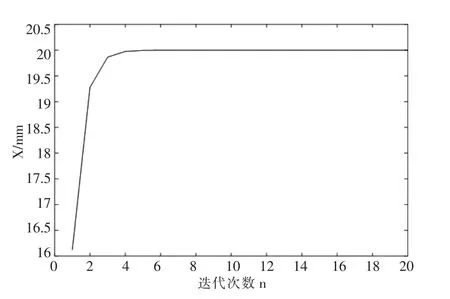
图2 位置跟踪曲线Fig.2 Position tracking curve
3 结束语
实验证明,在笛卡尔空间下,该算法可以同时满足力和位置跟踪的要求,所以基于零空间位置矢量的六自由度机械手臂的力/位混合控制具有可行性,并且得到了验证。
[1]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[2]周军,丁希伦.基于遗传算法的双臂机器人模糊力/位混合控制[J].机器人,2008,4.
[3]魏立新,李二超,王洪瑞.自适应模糊与CMAC并行的机器人力/位置控制[J].控制工程,2006,1.
[4]Miyamura A,Kimura H.Stability of feedback error learning scheme[J].Systems&Control Letters,2002,4.
猜你喜欢
气象水文海洋仪器(2021年4期)2021-12-11
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2017年9期)2017-11-27
中成药(2017年6期)2017-06-13
婚姻与家庭·性情读本(2017年1期)2017-02-16
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
中国塑料(2015年9期)2015-10-14
中国钢铁业(2012年11期)2012-08-22
中国钢铁业(2012年11期)2012-08-22