一种空间站餐后垃圾压缩装置的研制
2018-03-02 09:44秦俊杰朱景涛孙启臣
机电产品开发与创新 2018年1期
秦俊杰,朱景涛,孙启臣,袁 淼,王 燕,姚 旗,马 永
(1.北京卫星制造厂,北京 100094;2.中国航天员科研训练中心,北京 100094)
0 引言
随着载人航天飞行任务的持续开展,空间站废弃物的处理问题也日渐突出[1]。目前空间站的生活垃圾处理方式为手动将废物收集于容器中,通过双脚将其压实,该种方式压缩率低且不方便操作[2-3]。为了减少餐后垃圾的存储体积,研制了适用于空间站的餐后垃圾压缩装置。
根据餐后垃圾的压缩特性及随机装载特点开展了摸底压缩试验,为垃圾压缩装置输出压缩力值确定及压缩率指标提供设计依据。由于垃圾压缩装置在轨频繁使用,需对垃圾压缩装置进行长寿命设计,并通过寿命试验验证机构的工作寿命。本文主要论述垃圾压缩装置研制工作。
1 垃圾特性分析
1.1 垃圾类型
航天员在空间站驻留期间会产生餐后垃圾,餐后垃圾主要包括金属罐、软包装袋、清洁纸巾和少量残余食品等。其中金属罐为主要餐后垃圾,且该材料具有较高的强度、刚度及表面硬度。餐后垃圾的状态为随机装载。
1.2 垃圾压缩试验
为了确定压缩装置的输出力载,需要对压缩对象的压缩特性进行摸底试验。
在所有被压缩垃圾中,金属罐为主要且强度刚度最大的垃圾,通过压缩试验确定压缩率与压缩力的关系作为装置输出力载设计的重要依据。
试验采用CSS-1110压力机,最大压力为10t,将自制压头与压力机连接,金属罐装载至垃圾收集袋中并放置于模拟压缩腔中,通过联机电脑可直接获得压缩力与压缩位移的关系曲线,为了清晰反映压缩力与压缩率的关系,压缩腔采用透明有机玻璃制作。试验系统组成如图1所示。
通过开展大样本量的压缩试验,得到压缩力与压缩率关系如图2所示。
试验结果表明,压缩力随着压缩率的增大而增大。压缩进程前期,压缩率变化明显,压缩力增长缓慢,压缩进程后期,压缩力随着压缩率的增加而大幅增大。
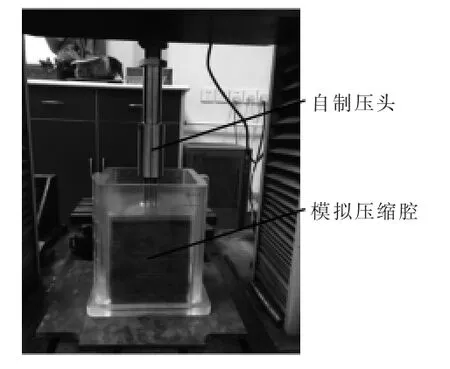
图1 压缩试验工装Fig.1 Tooling of compression test

图2 压缩率与压缩力关系Fig.2 Relationship of compression ratio and compressive force
2 垃圾压缩装置设计
2.1 压缩装置技术参数
垃圾压缩装置的主要技术参数如下:压缩装置有效容积≮6L,垃圾体积压缩率≮50%[4],压缩操作力≯50N,复位操作力≯25N,使用寿命≮10000次。
2.2 压缩装置总体结构设计
垃圾压缩装置总体结构设计如图3所示。操作手柄模块由加载手柄组件及复位手柄组件等组成,位于整个装置外侧面,为压缩装置提供动力源。传动模块由锥齿轮副及滚珠丝杠组件等组成,位于整个装置内部,实现力与运动的传递。压缩模块由压缩活塞组件、门组件及压缩腔等组成,位于整个装置的一端,实现餐后垃圾的收纳及压缩。操作手柄模块内部含有棘轮装置,可实现手柄的往复操作。压缩模块中压缩活塞、压缩腔及门组件形成密闭空间,可防止餐后垃圾压缩过程中溢出。
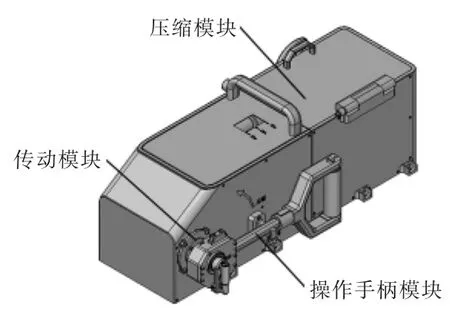
图3 垃圾压缩装置整体构型图Fig.3 Configuration diagram of trash compactor device
2.3 压缩装置工作原理
垃圾压缩装置主要包括操作手柄模块、传动模块和压缩模块三部分。
操作手柄模块为加载操作及复位操作提供动力源,手柄加载操作时,操作手柄驱动棘轮回转,将扭矩传递至传动模块;手柄回位操作时,棘轮位置被锁定;复位操作时,将棘轮装置解锁,通过复位手柄组件将扭矩传递至传动模块。
传动模块实现力与运动的传递,锥齿轮副与棘轮固定连接,通过棘轮将扭矩传递至滚珠丝杠组件,滚珠丝杠的转动转化成滚珠螺母的直线移动[5]。
压缩模块实现餐后垃圾的收纳与压缩,压缩活塞组件与滚珠螺母固定连接,滚珠螺母的直线移动使压缩活塞对压缩腔内的垃圾产生压缩位移,同时滚珠丝杠的扭矩转换成压缩活塞对垃圾的压缩力。压缩装置工作原理如图4所示。

图4 垃圾压缩装置工作原理Fig.4 Working principle diagram of trash compactor device
2.4 压缩装置工作模式
垃圾压缩装置为有人在轨使用产品,乘员入轨后解除活动部件束缚机构,使用垃圾压缩装置进行垃圾压缩处理。
垃圾压缩装置使用频率为一天一次,每日用餐完毕后,乘员使用垃圾压缩装置对当日收集完垃圾的收集袋进行压缩,每次压缩一个收集袋,压缩前乘员手动将收集袋放置到压缩装置内,压缩完毕后手动取出被压缩的收集袋。垃圾处理完毕后对垃圾压缩装置进行清洁处理。
垃圾压缩装置在舱内的工作模式如表1所示。
垃圾压缩装置各阶段状态见图5所示。

表1 垃圾压缩装置工作模式Tab.1 Work pattern of trash compactor device
3 试验情况
基于上述分析,制作了垃圾压缩装置原理样机,并进行了功能性能试验,如图6所示,试验结果如表2所示。
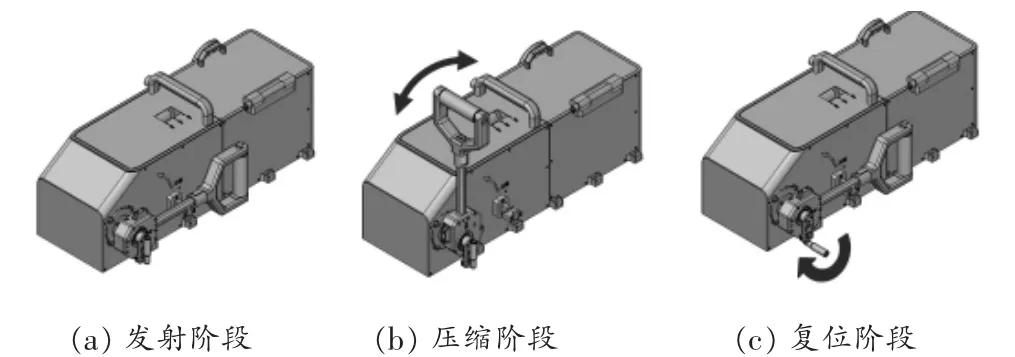
图5 垃圾压缩装置工作模式示意图Fig.5 The work pattern schematic diagram of trash compactor device
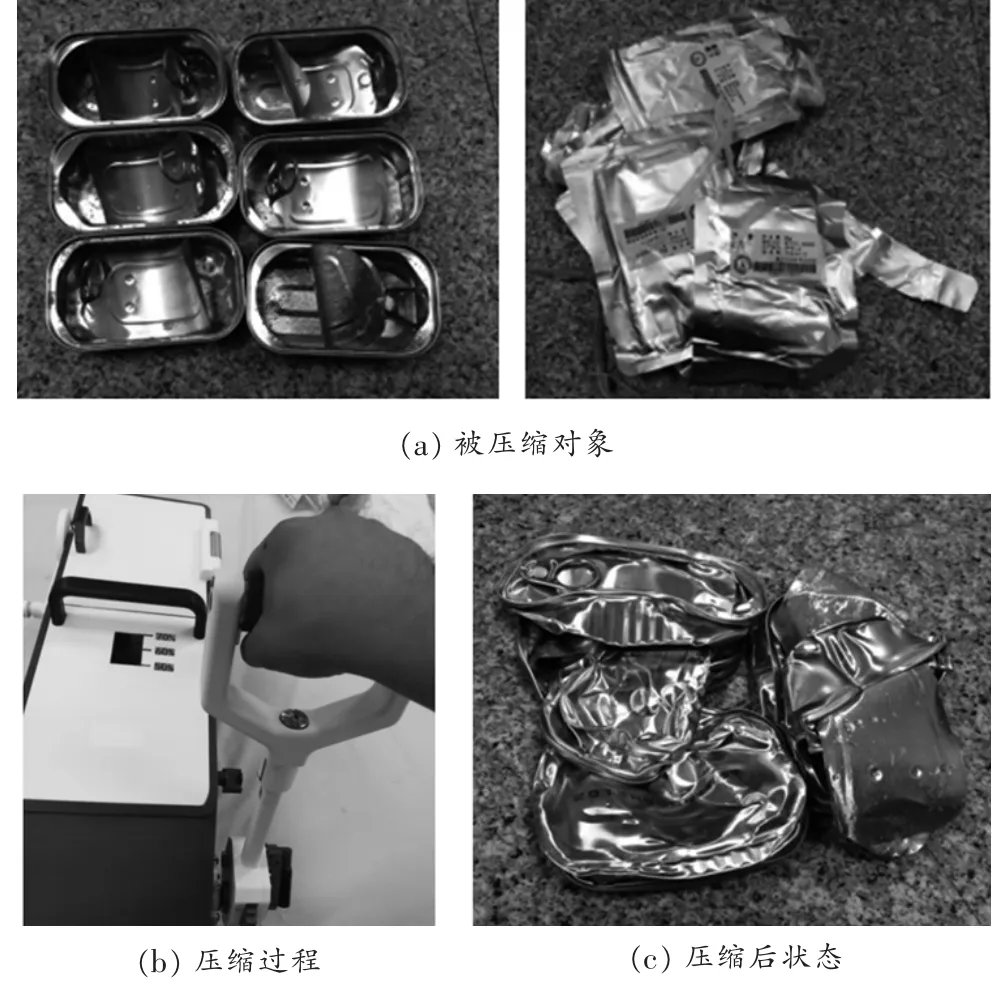
图6 垃圾压缩装置原理样机试验Fig.6 Test of trash compactor device prototype
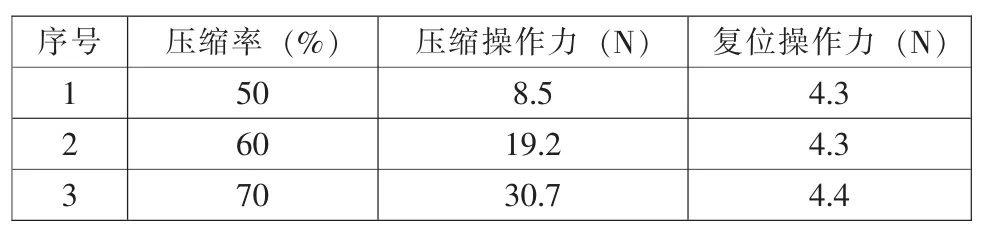
表2 试验结果汇总Tab.2 Test result
4 结论
本文研制了一种适用于空间站的餐后垃圾压缩装置。压缩装置具有大增力比、良好人机交互性,结构复杂、长寿命要求及轻量化要求高的特点。通过摸底试验掌握金属罐的压缩特性,获得压缩力与压缩率之间的关系。针对该种垃圾特性制定压缩装置的输出力载指标,设计手动垃圾压缩装置方案,建立力学分析模型,并进一步设计原理样机。试验结果表明,基于金属罐材料特性,所提出的垃圾压缩装置设计指标合理,其原理样机能够满足功能需求。
[1]The design and fabrication of a prototype trash compacting unit,Technical report,April 1,1973.
[2]Gregory S.Pace,John Fisher."Development of the Plastic Melt Waste Compactor-Desian and Fabrication of the Half-Scale Prototype",2005.
[3]Pace,Gregory S.,Lance Delzeit and John Fisher (2009),“Testing of a Plastic Melt Waste Compactor Designed for Human Space Exploration Missions,” SAE Paper No.2009-01-2363,39th International Conference on Environmental Systems,July 2009.
[4]Shuttle trash compactor to serve as extended duration flight treasure,Space News Roundup,March 16,1990.
[5]蒲明辉,孙青,等.物料压缩实验装置的研制[J].实验室科学,2011,14.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2019年11期)2019-12-04
科学与财富(2018年26期)2018-10-24
科技信息·中旬刊(2018年4期)2018-10-21
航空维修与工程(2018年8期)2018-09-10
电子制作(2018年11期)2018-08-04
科教导刊·电子版(2016年23期)2016-10-31
通信电源技术(2016年1期)2016-04-16
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10