
一种基于标记点的三维医学图像配准方法研究*
2018-03-02 03:15张维军李寅岩张送根
中国医学装备 2018年2期
冯 云 张维军 李寅岩 张送根*
在手术导航和手术机器人定位系统中存在多个坐标系,如图像坐标系、患者坐标系和工具坐标系等[1-3]。在应用其进行手术时需要将多个坐标系统一到同一坐标系下,此过程即称为配准或注册[4-6]。在导航手术流程中,配准是必不可少的重要组成部分,且配准的精度直接影响着整个手术导航定位系统的精度,只有在完成配准使得手术导航定位系统中各个设备的坐标系达到统一后,方可进行后续的导航跟踪,并对手术进行引导[7-10]。本研究提出一种新的基于标记点的三维医学图像配准方法,并对其可行性进行验证。
1 材料与方法
1.1 设备与材料
Sawbone腰椎和颈椎模型骨,农大二号猪4头(北京积水潭医院动物中心);天玑TM骨科手术机器人(北京天智航医疗科技股份有限公司);西门子Arcadis Orbic 3D(SIEMENS Healthineers,Germany);透X射线的手术床(北京天智航医疗科技股份有限公司);克氏针及手术器械(天津新中医疗器械有限公司)。
1.2 三维医学图像配准方法
1.2.1 标记点设计
为便于对标记点进行自动识别和提取质心,本研究选取应用在X射线计算机断层成像(computed tomography,CT)和锥形束计算机断层摄影(conebeam computed tomography,CBCT)扫描图像中亮度等级较高的材质制成的球形标记点,为保证标记点在CT及CBCT的有效成像视野中完全成像,综合考虑后期自动配准的速度和效果,本研究设计6个标记点,并将其各向异性地安装在定位工具上,其带有标记点的定位工具如图1所示。

图1 定位工具示意图
1.2.2 标记点初步粗筛
本研究利用定位工具上标记点(参考标记点)的灰度特征,结合其几何特性进行图像标记点提取。①基于参考标记点的理论CT值,利用移动立方体(marching cubes,MC)算法在图像中分割得到一系列候选标记点,其中既包含真实的标记点,也包括一些错误的标记点;②计算候选标记点的质心坐标,并基于参考标记点的尺寸、形状等几何特性进行图像标记点的初步粗筛选,其流程如图2所示。
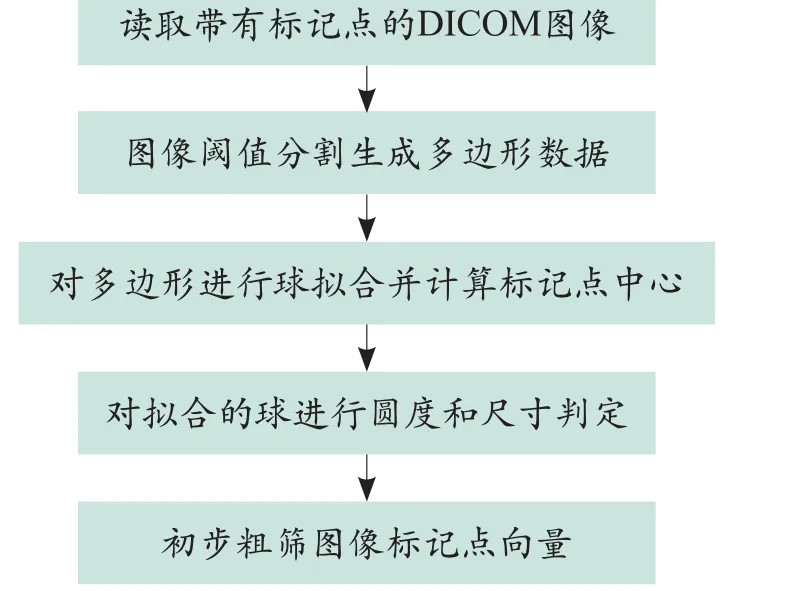
图2 标记点初步粗筛流程图
1.2.3 标记点精细筛选及配对
本研究对图像标记点的精细筛选主要是基于参考标记点之间的空间位置关系实现。①从参考标记点中任意选出3个标记点组成三角形,而后利用该三角形在图像标记点中初步筛选出与其全等的三角形,形成多组全等三角形模板对;②以全等三角形模板对为基准,再结合剩余的参考标记点将图像标记点逐一筛选出来,得到参考标记点向量和与其一一对应的图像标记点向量。在此过程中,为将定位工具上的标记点初步粗筛选结果包含的错误标记点剔除,当参考标记点向量和图像标记点向量中元素数目≥4时,每当需要往向量中新加入一个标记点都要计算参考标记点向量和图像标记点向量之间的旋转矩阵,并根据计算所得旋转矩阵计算反带误差,并判断反带误差是否小于目标误差,从而判断新加入的图像标记点是否满足要求,同时还可从之前识别出的多组全等三角形模板对中剔除干扰项,其流程如图3所示。
1.3 试验方法
本研究分别以腰椎、颈椎模型骨、动物(猪)脊椎骨和尸体脊椎骨等作为试验对象,应用CBCT共采集25例三维X射线医学图像对算法性能进行验证。每次采集图像时,均将带有6个标记点的定位工具和试验对象一起进行扫描。其中,试验验证时均应用直径为3 mm的球形钢珠作为标记点,固定标记点的定位工具均是由透X射线的材料制成。利用标记点进行图像配准时,通过计算参考标记点和图像标记点之间刚性变换的旋转和平移矩阵实现,该矩阵可以使参考标记点和与其一一对应的图像标记点之间的均方根距离最小,故本研究应用图像配准和转换后对应标记点之间的均方根距离作为标记点配准误差,也是标记点精细筛选及配对方法中判断新加入图像标记点是否符合要求的反带误差,其模型骨及定位工具三维X射线医学图像如图4所示。

图3 标记点精细筛选及配对流程图
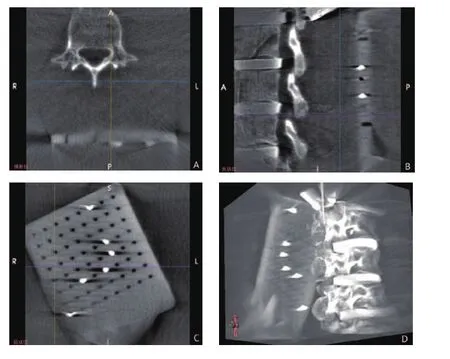
图4 模型骨及定位工具三维X射线医学图像

表1 试验配准结果
2 结果
应用25幅三维X射线医学图像进行标记点的识别及配对,每幅图像中包含6个标记点,共计150个图像标记点。图4所示的三维X射线医学图像中的标记点粗筛结果如图5所示,标记点的精细筛选结果如图6所示。

图5 三维X射线医学图像的标记点粗筛图像

图6 三维X射线医学图像的标记点精细筛选图像
在25幅医学图像中,经过MC算法结合标记点几何特征初步粗筛共计得到170个标记点,经过精细筛选配对后最终得到131个正确标记点,共计19个标记点未被识别出来,其主要原因包括:①CBCT的有效成像视野较小,成像时位于CBCT有效成像视野中心的标记点亮度较高,而位于有效成像视野边缘的标记点亮度较低,故在进行标记点粗筛时,亮度较低的标记点会被剔除;②试验对象本身体积较大,而CBCT成像视野有限,定位工具在和试验对象一起扫描时并未扫描完整,有漏扫标记点的现象。由于本方法在进行设计时对前述因素进行了考虑,标记点数目设计时有冗余,故应用本方法依然可以实现图像配准,且25组试验的配准误差均<1 mm,算法达到了较好的识别效果和配准精度,见表1。
3 讨论
目前,常用的配准方法有两种,一种是基于表面,该算法实现过程复杂且精度较低;一种是基于标记点[11-12]。在计算机辅助手术系统中,标记点是用于实现定位的物体,既可以直接附着在人体表面,也可以固定在定位工具上。配准时,首先将标记点或带有标记点的定位工具和患者患处一起利用三维X射线成像设备进行扫描,然后将扫描图像中的标记点利用自动或手动的方法提取出来,从而获取其在图像坐标系中的坐标,最后通过标记点序列配对算法将患者或定位工具上的标记点与图像中的标记点建立一一映射关系,即可得到患者和(或)工具坐标系与图像坐标系之间的旋转矩阵R和平移向量T,完成配准[13-14]。
标记点序列自动配对方法常用的是迭代就近点算法,该算法是一种基于最小二乘法的匹配方法,其可以重复确定标记点点集之间的对应关系,并计算两个对应点集之间的变换矩阵,是一种配准精度较高的算法[15-17]。但是,该算法对扫描点集的初始配准位置有要求,鲁棒性较差,计算时间长,且经试验发现匹配结果不可靠,容易陷入局部最优解[18-20]。为此,本研究提出了一种基于标记点的全自动三维医学图像配准方法,并对其可行性进行了研究,其结果显示,该方法不需要医生在图像上手动拾取标记点,并能克服传统标记点序列配对方法的弊端。
4 结论
本研究提出了一种基于标记点的三维医学图像配准方法,首先基于标记点的灰度特征结合其几何特性,初步粗筛出候选标记点并计算其中心,而后利用参考标记点之间的几何空间位置关系,结合配准精度要求从候选标记点中筛选出真正的标记点,并实现图像配准。通过一系列的试验表明,该方法配准误差在1 mm以内,具有较好的识别效果和配准精度,可满足临床应用要求。此外,该方法运算量较小,可以实现实时处理,故可用于手术导航及手术机器人的术中配准,且在其他相关领域也具有广泛的应用前景。
[1]孙曦,周正东.3D医学图像中标志点的自动识别与定位[J].现代生物医学进展,2008,8(4):709-712.
[2]Gerber N,Gavaghan KA,Bell BJ,et al.Highaccuracy patient-to-image registration for the facilitation of image-guided robotic microsurgery on the head[J].IEEE Trans BiomedEng,2013,60(4):960-968.
[3]刘振颖,张永寿.基于控制点图像配准方法的研究[J].中国医学装备,2011,8(3):6-9.
[4]于颖,聂生东.医学图像配准技术及其研究进展[J].中国医学物理学杂志,2009,26(6):1485-1489.
[5]白晶,丁辉,王广志,等.手术导航中人体标志点注册方法和注册精度研究[J].生物医学工程学杂志,2008,25(6):1242-1248.
[6]Taylor RH,Stoianovici D.Medical robotics in computer-integrated surgery[J].IEEE T Robotic Autom,2003,19(5):765-781.
[7]向华.手术导航三维空间配准技术研究[D].北京:清华大学,2012.
[8]Brandt G,Zimolong A,Carrat L,et al.CRIGOS:a compact robot for image-guided orthopedic surgery[J].IEEE Trans Inf Technol Biomed,1999,3(4):252-260.
[9]申艳平.医学图像配准技术[J].中国医学物理学杂志,2013,30(1):3885-3889.
[10]司璇.光学手术导航系统中实时自动注册技术的研究[D].广州:华南理工大学,2016.
[11]Hong J,Hashizume M.An effective point-based registration tool for surgical navigation[J].Surg Endosc,2010,24(4):944-948.
[12]Lin Q,Yang R,Cai K,et al.Real-time automatic registration in optical surgical navigation[J].Infrared Phys Techn,2016,76:375-385.
[13]Fan Y,Jiang D,Wang M,et al.A new markerless patient-to-image registration method using a portable 3D scanner[J].Med Phys,2014,41(10):1019-1010.
[14]Cai K,Yang R,Lin Q,et al.Tracking multiple surgical instruments in a near-infrared optical system[J].Comput Assist Surg(Abingdon),2016,21(1):46.
[15]Zheng G,Gerber N,Widmer D,et al.Automated detection of fiducial screws from CT/DVT volume data for image-guided ENT surgery[J].Conf Proc IEEE Eng Med Biol Soc,2010,2010(10):2325-2328.[16]Shamir R,Freiman M,Joskowicz L,et al.Robotassisted image-guided targeting for minimally invasive neurosurgery:planning registration and in-vitro experiment[J].Med Image Comput Comput Assist Interv,2005,8(Pt 2):131-138.
[17]He Y,Liang B,Yang J,et al.An iterative closest points algorithm for registration of 3D laser scanner point clouds with geometric features[J].Sensors,2017,17(8):1862.
[18]Tseng C,Chen H,Wang S,et al.Image-guided robotic navigation system for neurosurgery[J].J Robotic Syst,2015,17(8):439-447.
[19]Wu YF,Wang W,Lu KQ,et al.A new method for registration of 3D point sets with low overlapping ratios[J].Procedia Cirp,2015,27:202-206.
[20]Salvi J,Matabosch C,Fofi D,et al.A review of recent range image registration methods with accuracy evaluation[J].Image Vision Compu,2007,25(5):578-596.
猜你喜欢
机电安全(2022年5期)2022-12-13
导航定位学报(2022年2期)2022-04-11
小太阳画报(2020年11期)2020-12-10
小太阳画报(2020年10期)2020-10-30
科学(2020年1期)2020-01-06
红领巾·成长(2018年10期)2018-11-19
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
读者(2017年18期)2017-08-29
中国卫生(2015年12期)2015-11-10
