
信号控制交叉口的复合动态车道管理方法
2018-03-01 05:24徐洪峰高霜霜郑启明
吉林大学学报(工学版) 2018年2期
徐洪峰,高霜霜,郑启明,章 琨
(大连理工大学 交通运输学院,辽宁 大连116024)
0 引 言
潮汐是海水在天体引潮力作用下产生的周期性运动。通常采用潮汐交通描述机动车交通需求在空间和时间上的一种分布特征,具体指双向通行道路区段的机动车重载方向或信号控制交叉口的机动车重载流向发生周期性变化的现象。职住分离带来的以私人交通方式为主导的高强度通勤交通需求是导致城市干道潮汐交通现象的根本原因[1-7]。通常以机动车交通量方向分布系数作为潮汐交通现象的判定标准[8]。
动态车道是指能够周期性变化规定行车方向的机动车道,主要分为两类:①道路区段内处于中央位置的动态连续车道[9-15],又称潮汐车道;②信号控制交叉口的动态进出口车道[16-23],如可变导向车道、逆向可变车道、综合待行车道等。机动车交通需求高峰时段,动态车道的规定行车方向变化为重载方向或流向;机动车交通需求非高峰时段,动态车道的规定行车方向恢复至常规状态。动态车道管理方法可以充分利用道路空间,有效化解固定不变的车道数配置和车道功能划分与周期性变化的机动车重载方向或流向之间的矛盾,属于交通运行组织的高级形式。推广并创新动态车道管理方法是最大限度地发挥城市干道交通服务能力的重要途径。
现有的动态连续车道管理方法和动态进出口车道管理方法互不兼容。沿干道直行的潮汐车道延伸至交叉口时,必须禁止机动车左转或将左转进口车道设置在潮汐车道的右侧,这会给一些道路使用者造成不便,也会带来衍生的安全和效率问题。无论采用何种动态进出口车道,均无法与上、下游路段的潮汐车道无缝对接,机动车交通需求高峰时段,难以改变重载方向通行空间资源供给不足、轻载方向通行空间资源供给过剩的基本面。
为了解决上述问题,本文面向干道沿线的信号控制交叉口,在干道相对进出口道范围内,从道路空间布局、交通控制设施和规定行车方向的变化过程等方面,建立一种复合动态车道管理方法,实现潮汐车道与可变导向车道的和谐共存,深度挖掘干道存量空间资源,高效应对机动车重载方向的周期性变化。
1 道路空间布局
假定:干道为东西走向,相交道路为南北走向;干道双向的路段车道总数为6条;沿干道直行的机动车具有潮汐交通现象;干道沿线交叉口的各个进口道均未实施机动车转向限制。
具有左转机动车保护通过功能的信号控制交叉口是城市干道的重要组成部分,有必要对此类交叉口的进口道和出口道做展宽处理,以期实现上游路段与进口道、进口道与出口道、出口道与下游路段的交通服务能力匹配。右侧通行规则下,前方交叉口左转的机动车习惯靠内侧车道行驶,右转的机动车习惯靠外侧车道行驶。左转在内、直行居中、右转在外的交叉口进口车道功能划分方式,不仅符合驾驶员的驾驶习惯,还具有交通冲突少、相位结构灵活等优点,因此,被广泛应用于工程实践。
对于干道沿线具有左转机动车保护通过功能的信号控制交叉口,遵循“展宽进口道、消除下游出口道交通瓶颈、最小化交通冲突、保持相位结构灵活性”的原则,配置路段、进口道和出口道的车道数并划分车道功能,如图1所示。
机动车交通需求非高峰时段,干道双向的路段车道数同为3条,进口道做展宽处理,出口车道数与对向的直行进口车道数相等,下游路段车道数与出口车道数相等。
机动车交通需求高峰时段,干道重载和轻载方向的路段车道数分别为4条和2条,进口道做展宽处理,出口车道数与对向的直行进口车道数相等,下游路段车道数与出口车道数相等。
由图1可知,动态车道处于路段和进出口道的中央位置。以动态车道在机动车交通需求非高峰时段的规定行车方向为基准,分析其规定行车方向的变化方式,如表1所示。
复合动态车道管理交叉口的典型道路空间布局如图2所示。
在一天的不同时段内,随着机动车重载方向的变化,路段车道3、4以及进出口车道3的规定行车方向的起点和终点同时变化;进出口车道4的规定行车方向的起点可能变化、终点必然变化;进出口车道5的规定行车方向的起点不变、终点变化。应将路段车道3、4以及进出口车道3、4设置为潮汐车道,施划潮汐车道线,将进出口车道5设置为可变导向车道,施划可变导向车道线[24]。
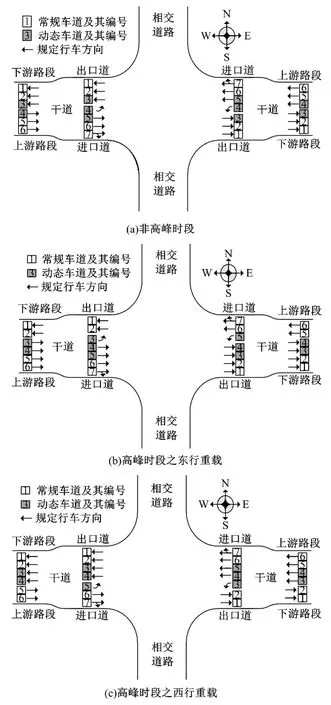
图1 车道数配置与车道功能划分Fig.1 Lane configuration and lane-use assignment
考虑到相交道路的左转机动车驾驶员很难在驶入交叉口之前预知干道当前的出口车道数,应为相交道路的左转机动车设置路口导向线,无论潮汐车道和可变导向车道的规定行车方向如何变化,始终将它们引导至干道的常规出口车道。
根据东、西两侧的进出口车道数以及单条进出口车道的最低宽度要求,应在东、西两侧人行横道的中央设置行人过街安全岛[25]。考虑到机动车交通需求的非高峰时段远长于高峰时段,为了在一天的大部分时间内保持机动车运行轨迹的平顺性,宜在进出口车道3、4之间开辟宽度不小于2 m的实体分隔带并借此设置行人过街安全岛。
随着潮汐车道和可变导向车道规定行车方向的变化,会出现同一进口道或出口道的机动车在行人过街安全岛两侧通行的现象,应在实体分隔带的外部设置反光膜,提醒驾驶员注意实体分隔带的位置。
2 交通控制设施
在潮汐车道线上设置串联的塑料隔离墩(即水马),刚性分离本向与对向的机动车。潮汐车道和可变导向车道的规定行车方向的变化过程中,利用拉链车(Road zipper)自动变换水马的位置。
在东、西两侧进出口道的起始和结束位置分别安装可变车道行驶方向标志,提示驾驶员按照各条车道的规定行车方向行驶[24]。
在人行横道两端和行人过街安全岛上安装4组行人信号灯。在行人信号灯杆的上端安装1组左转方向指示信号灯、1组机动车信号灯。
综上所述,复合动态车道管理交叉口的交通控制设施安装方式如图3所示。
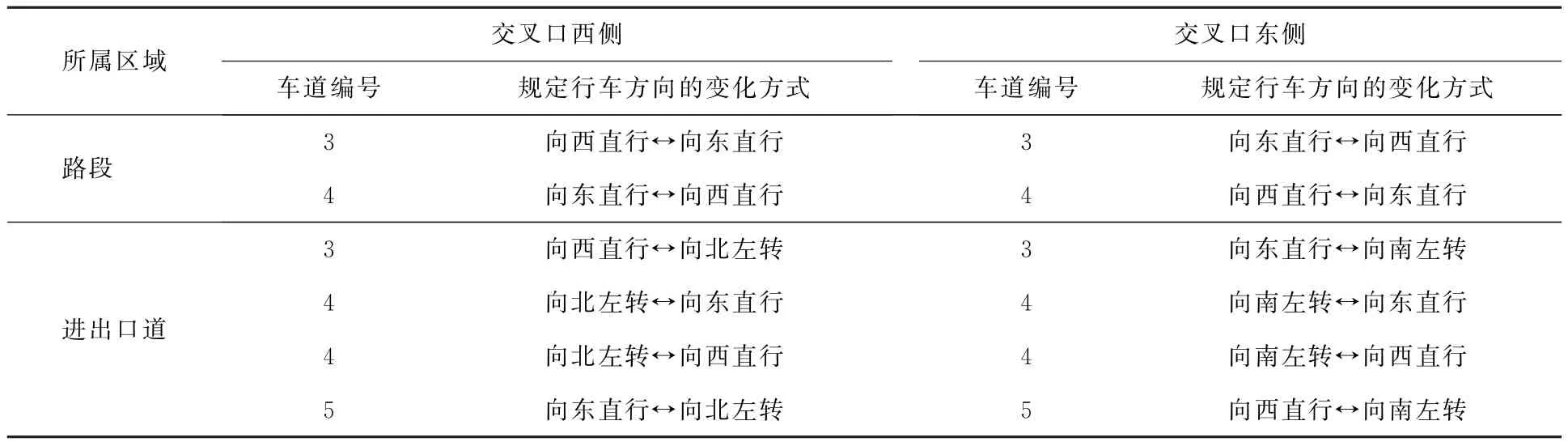
表1 动态车道及其规定行车方向的变化方式Table 1 Dynamic lanes and their directions of travel
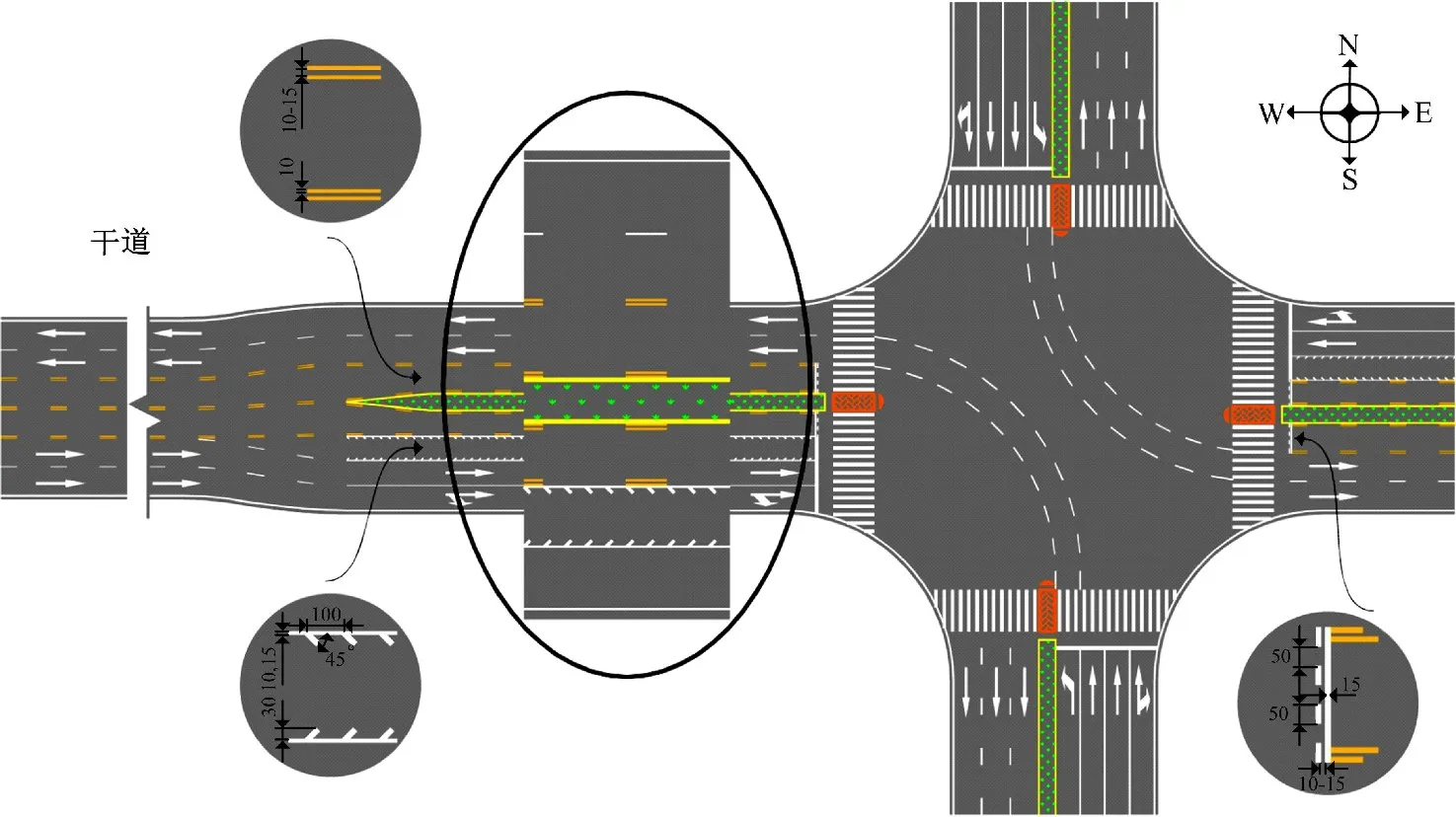
图2 典型的道路空间布局Fig.2 Typical intersection layout
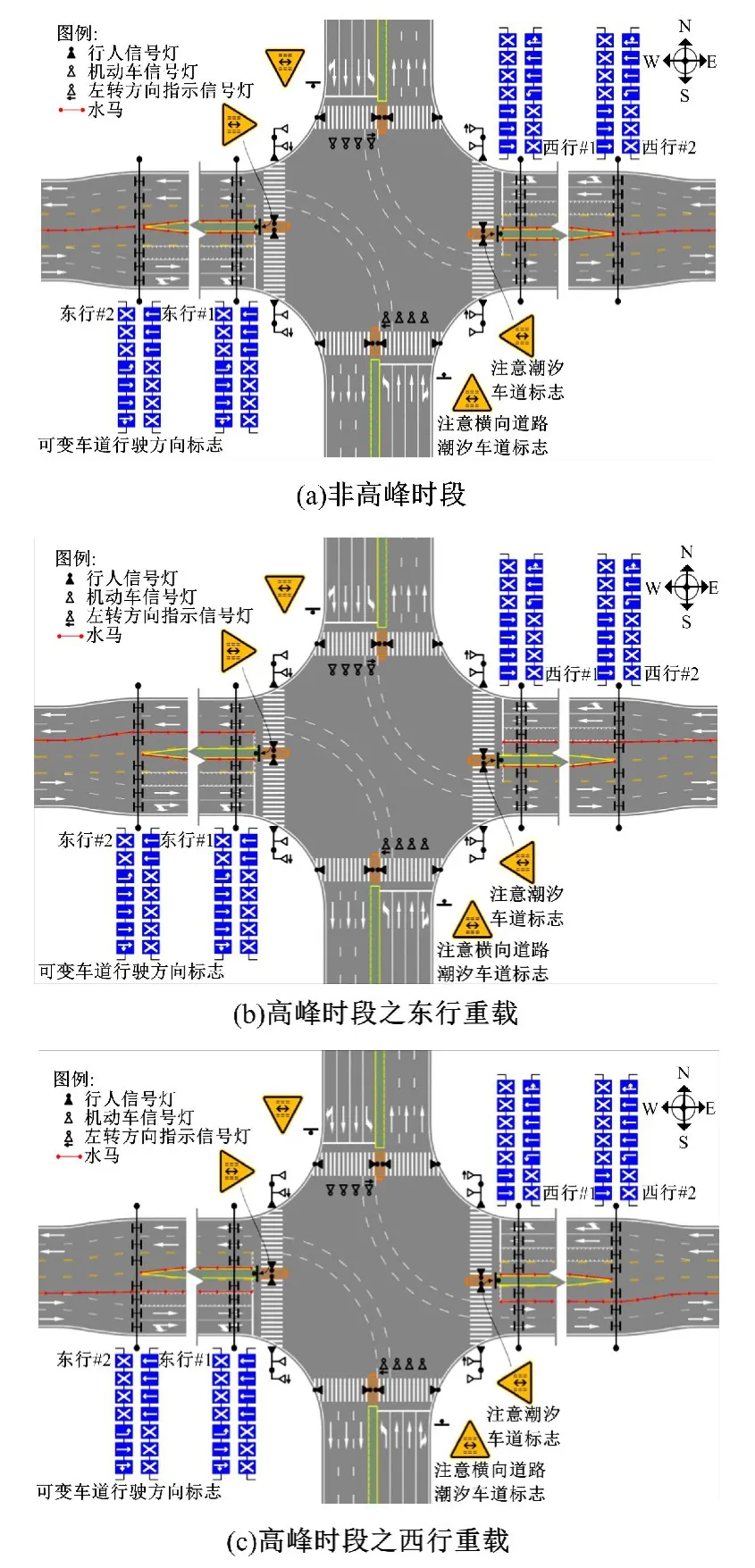
图3 交通控制设施的安装方式Fig.3 Installation of traffic control devices
复合动态车道管理交叉口采用左转在内、直行居中、右转在外的进口车道功能划分方式,可以实施支持左转机动车保护通过和行人同步二次过街的相位显示顺序[26,27],如图4所示。根据相对进口道的机动车相位获得通行权的先后顺序,将上述相位显示顺序分为直行前置、左转前置和直行左转前置。

图4 备选的相位显示顺序Fig.4 Phase sequence options
3 规定行车方向的变化过程
随着机动车交通需求时段的变化,在拉链车和可变车道行驶方向标志的协同作用下,潮汐车道和可变导向车道的规定行车方向将发生变化,具体分为以下4种情形:
(1)非高峰时段→高峰时段之东行重载。
(2)高峰时段之东行重载→非高峰时段。
(3)非高峰时段→高峰时段之西行重载。
(4)高峰时段之西行重载→非高峰时段。
不同情形下,拉链车与可变车道行驶方向标志的联动方式如图5所示。可以借助先进的技术手段跟踪拉链车的行进位置和动作,自动调整可变车道行驶方向标志的图形显示。
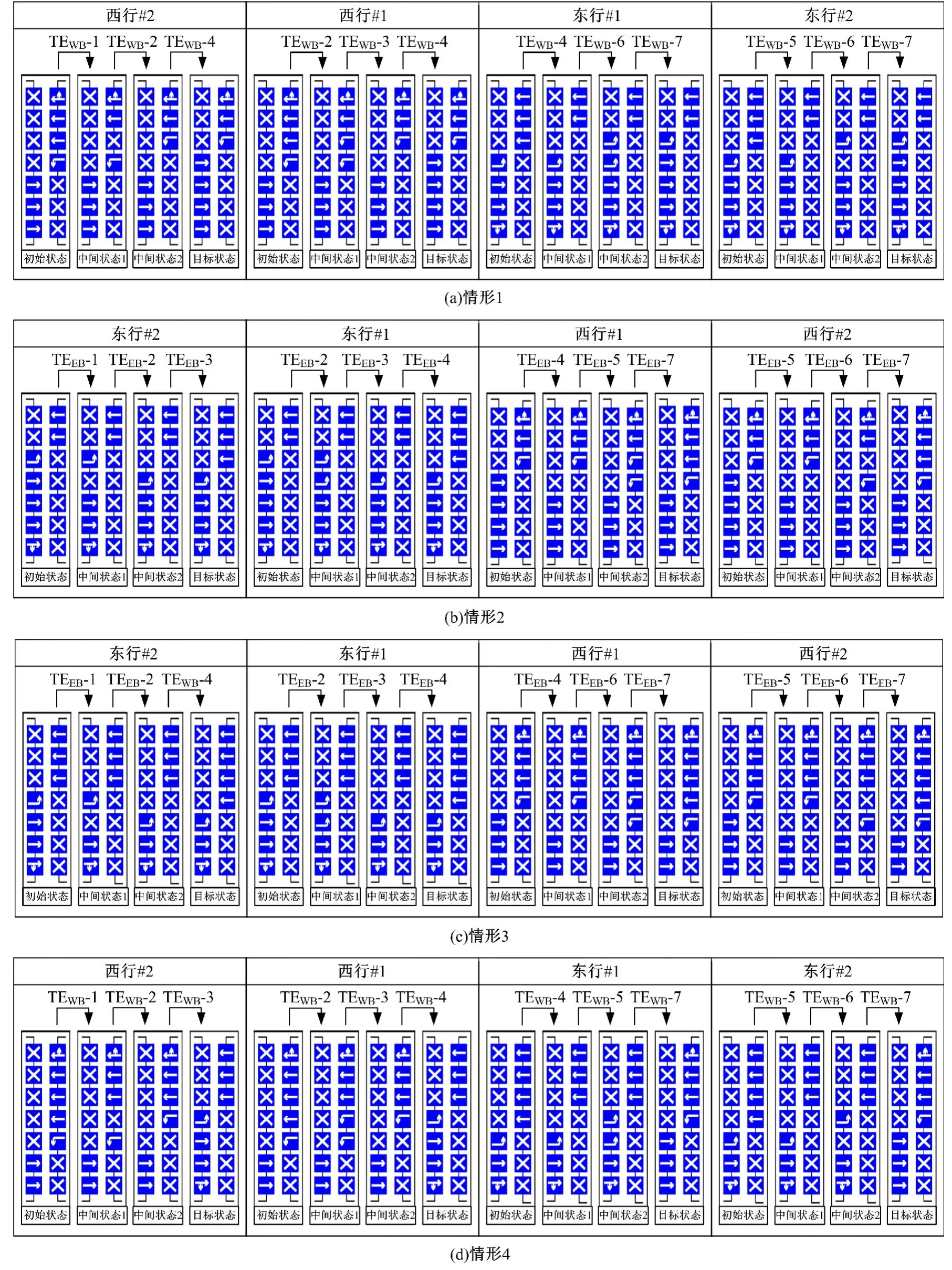
图5 拉链车与可变车道行驶方向标志的联动方式Fig.5 Cooperation of road zipper and changeable lane-use signs
引起可变车道行驶方向标志的图形显示变化的交通事件(TEWB-no.和TEEB-no.)包括:
TEWB-1:拉链车自东向西行驶至西行#2可变车道行驶方向标志的上游10~20 m处并临时停车,停车时间不少于1个信号周期时长。
TEWB-2:拉链车自东向西行驶至西行#2可变车道行驶方向标志的下方。
TEWB-3:拉链车自东向西行驶至西行#1可变车道行驶方向标志的下方。
TEWB-4:拉链车自东向西行驶至东行#1可变车道行驶方向标志的下方。
TEWB-5:拉链车自东向西行驶至东行#2可变车道行驶方向标志的下方。
TEWB-6:拉链车自东向西行驶至东行#2可变车道行驶方向标志的下游10~20 m处并临时停车,停车时间不少于1个信号周期时长。
TEWB-7:拉链车重新启动并继续向西行驶。
TEEB-1:拉链车自西向东行驶至东行#2可变车道行驶方向标志的上游10~20 m处并临时停车,停车时间不少于1个信号周期时长。
TEEB-2:拉链车自西向东行驶至东行#2可变车道行驶方向标志的下方。
TEEB-3:拉链车自西向东行驶至东行#1可变车道行驶方向标志的下方。
TEEB-4:拉链车自西向东行驶至西行#1可变车道行驶方向标志的下方。
TEEB-5:拉链车自西向东行驶至西行#2可变车道行驶方向标志的下方。
TEEB-6:拉链车自西向东行驶至西行#2可变车道行驶方向标志的下游10~20 m处并临时停车,停车时间不少于1个信号周期时长。
TEEB-7:拉链车重新启动并继续向东行驶。
由于规定行车方向的变化过程需要耗费一定的时间,从效率的角度考虑,由机动车交通需求非高峰时段向高峰时段的变化过程的启动时刻应适度早于高峰时段的预计来临时刻,由机动车交通需求高峰时段向非高峰时段的变化过程的启动时刻应适度晚于高峰时段的预计结束时刻。
4 仿真实验
针对具有潮汐交通现象的城市干道沿线的典型十字形信号控制交叉口,分别实施复合动态车道管理方法、动态连续车道管理方法和静态车道管理方法,利用VISSIM 6.0建立仿真实验环境,在机动车全感应式信号控制条件下,对比分析机动车交通需求高峰时段内不同车道管理方法对于交叉口整体性能的影响,验证复合动态车道管理方法的有效性。
采用机动车全感应式信号控制技术进行仿真实验的原因有三:其一,动态车道管理方法并未给交叉口的交通控制设施和信号控制技术提出本质上的变革要求,常规的交通控制设施和信号控制技术完全适用于动态车道管理交叉口;其二,机动车全感应式信号控制技术能够监测并响应机动车交通需求的短时波动,获得较预设时间式信号控制技术更优的交叉口整体性能;其三,机动车全感应式信号控制技术有助于消除非高质量的信号配时方案对于交叉口整体性能的干扰,避免误判动态车道管理方法的有效性。
4.1 道路空间条件
采用不同车道管理方法的对象交叉口在路幅宽度、交通冲突区规模、路段车道总数、进出口车道总数以及其他诸多空间设计要素方面具有完全相同的技术指标,如图6所示。各个进口道的展宽段长度为50 m、展宽渐变段长度为20 m。干道和相交道路的限制车速为50 km/h。
假定:机动车交通需求高峰时段,沿干道东行是重载方向,沿干道西行是轻载方向,以灰色导向箭头暗示仿真实验中潮汐车道和可变导向车道的规定行车方向;对象交叉口各个进口道的车道功能划分充分考虑了不同流向的机动车交通需求比例。
对于复合动态车道管理交叉口和动态连续车道管理交叉口,干道重载方向共有5条进口车道(1条左转专用车道、3条直行专用车道、1条直右合用车道),干道轻载方向共有3条进口车道(1条左转专用车道、1条直行专用车道、1条直右合用车道)。
对于静态车道管理交叉口,干道重载和轻载方向的进口车道总数均为4条(1条左转专用车道、2条直行专用车道、1条直右合用车道)。
显然,无论采用何种车道管理方法,对象交叉口的上游路段与进口道、进口道与出口道、出口道与下游路段均实现了交通服务能力匹配。

图6 对象交叉口的道路空间布局Fig.6 Test-bed intersection layouts
4.2 交通需求条件
采用随机抽样的方式确定高峰时段对象交叉口的机动车交通需求。为了消除标准车辆折算给仿真建模带来的不便,将机动车的交通构成全部定义为标准车辆,即车辆长度小于6 m的小型车。
干道双向承载的机动车交通量总和的抽样范围取2600~3200 pcu/h,单位增量为1 pcu/h。机动车交通量方向分布系数的抽样范围取65%~75%,单位增量为0.1%。西进口(重载方向)左转比例的抽样范围取10%~15%,右转比例的抽样范围取3%~6%,单位增量均为0.1%。东进口(轻载方向)左转比例的抽样范围取20%~25%,右转比例的抽样范围取5%~10%,单位增量均为0.1%。
相交道路双向承载的机动车交通量总和的抽样范围取2200~2800 pcu/h,单位增量为1 pcu/h。机动车交通量方向分布系数的抽样范围取40%~60%,单位增量为0.1%。南进口和北进口的左转比例的抽样范围取15%~25%,右转比例的抽样范围取4%~8%,单位增量均为0.1%。
机动车交通需求的抽样结果如表2所示。组1~组5的交通量总和逐渐增大。

表2 机动车交通需求的抽样结果Table 2 Sampling results of vehicular demand
4.3 信号控制条件
对象交叉口具有4个左转机动车相位、4个直行机动车相位、4个行人相位。干道及相交道路均采用直行前置的相位显示顺序,如图7所示。

图7 对象交叉口的相位显示顺序Fig.7 Phase sequence of test-bed intersections
就动态连续车道管理交叉口而言,鉴于东、西两侧左转专用车道位置的特殊性,不允许出现同一进口的直行与左转机动车相位的搭接状态。
为了实施机动车全感应式信号控制,在每条进口车道(含动态车道)的停止线上游40 m处布设一组交通流数据检测器,自所属机动车相位的最小绿灯时间结束时刻至绿灯时间结束时刻,采用车道独立检测方式采集车头时距数据[28]。
满足下列条件之一时,前置的直行相位独立切断绿灯:①该相位达到最小绿灯时间且它的所有检测器采集的车头时距先后大于车头时距阈值;②该相位达到最大绿灯时间。前置直行相位的绿灯结束后,通行权传递至与其冲突的后置左转相位。由于不允许出现相位搭接状态,动态连续车道管理交叉口的两个前置直行相位必须同时切断绿灯,见下文。
满足下列条件之一时,后置的两个左转相位同时切断绿灯:①两个相位均达到最小绿灯时间且它们的所有检测器采集的车头时距先后大于车头时距阈值;②任意相位达到最大绿灯时间。后置左转相位的绿灯结束后,通行权传递至相交道路的前置直行相位及其并发的行人相位。
机动车全感应式信号控制过程中,行人相位的绿灯时间保持不变,其数值主要取决于并发机动车相位的最小绿灯时间[29,30]。
其他信号配时参数如下:直行、左转机动车相位的黄灯时间取3 s,红灯清空时间取2 s,最小绿灯时间分别取15、10 s,最大绿灯时间取60 s;交通流数据检测器的车头时距阈值取3 s。对于采用不同车道管理方法的对象交叉口,互为冲突的机动车相位与行人相位的绿灯间隔时间保持不变,由于篇幅所限,不再赘述其取值。
4.4 仿真模型参数
自由流状态下,机动车的最小和最大期望速度分别为48、58 km/h。
Wiedemann 74跟驰模型中,机动车的最小前视和后视距离均为30 m,最大前视和后视距离均为100 m,平均停车间距为1.5 m,期望安全距离的附加部分为2.5 m,期望安全距离的倍数部分为3.5 m。车道变换模型中,车辆消失前的等待时间为45 s。其他驾驶行为参数均采用默认值。
针对每个对象交叉口,在每种交通需求条件下进行1组仿真实验,每组实验进行7次仿真运行,每次仿真运行选取1个专用随机数。单次仿真运行的总时间为4500 s,数据采集时段为900~4500 s。
4.5 仿真实验结果
每组仿真实验得到的评价指标值等于该组实验7次仿真运行输出的评价指标值的算术平均。
3种对象交叉口的车均延误如图8所示。在所有的机动车交通需求条件下,复合动态车道管理交叉口的车均延误始终低于其他交叉口,机动车交通量总和越大,复合动态车道管理交叉口在车均延误方面的性能优势越明显;随着机动车交通量总和的增加,复合动态车道管理交叉口的车均延误增幅平缓,其他交叉口的车均延误增幅则较为剧烈。由此可见,机动车交通需求高峰时段,与动态连续车道管理方法和静态车道管理方法相比,复合动态车道管理方法能够改善交叉口的整体性能,特别是当交叉口处于临近饱和状态或过饱和状态时。
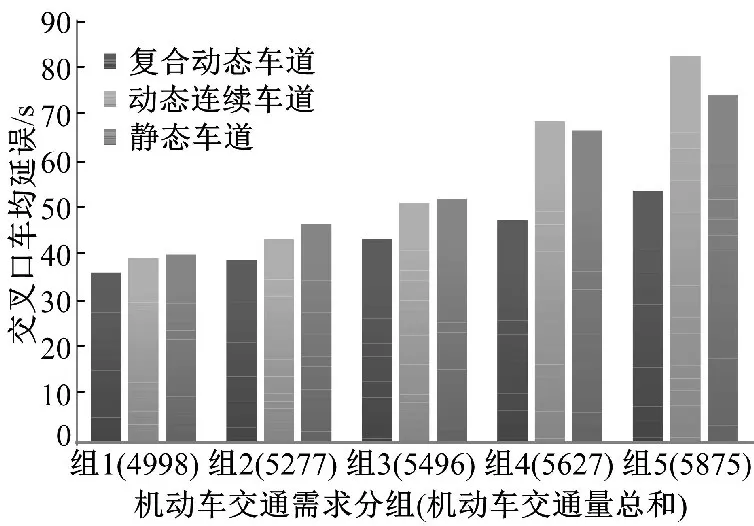
图8 对象交叉口的车均延误Fig.8 Average vehicle delays of test-bed intersections
3种对象交叉口的干道相对进口道的直行和右转平均排队长度比值如图9所示(以轻载方向进口道的平均排队长度为基准值)。在几乎所有的机动车交通需求条件下,与其他交叉口相比,复合动态车道管理交叉口的平均排队长度比值始终更加接近于1.0;随着机动车交通量总和的增加,复合动态车道管理交叉口的平均排队长度比值小幅变化,其他交叉口的平均排队长度比值则会出现大幅变化。由此可见,机动车交通需求高峰时段,与动态连续车道管理方法和静态车道管理方法相比,复合动态车道管理方法能够更加均衡地利用干道双向的道路空间,特别是当交叉口处于临近饱和状态或过饱和状态时。

图9 干道相对进口道的直行和右转平均排队长度比值Fig.9 Ratio of average through/right-turn queue lengths on opposing arterial approaches
5 结束语
本文提出的复合动态车道管理方法具备良好的可实施性和广阔的应用前景。它遵循传统的交叉口渠化原则,将潮汐车道、可变导向车道和常规车道组合设置于具有潮汐交通现象的城市干道沿线的信号控制交叉口,支持常规的交通控制设施和信号控制技术,在拉链车和可变车道行驶方向标志的协同作用下,根据交通事件自动调整潮汐车道和可变导向车道的规定行车方向。机动车交通需求高峰时段的仿真实验结果显示,与动态连续车道管理方法和静态车道管理方法相比,复合动态车道管理方法能够改善交叉口的整体性能,更加均衡地利用干道双向的道路空间,这种性能优势随着交叉口机动车交通负荷的提高而愈发显著。本团队的后续研究工作包括:首先,从技术上实现拉链车行进位置和动作的实时跟踪以及可变车道行驶方向标志的图形显示的自动调整;其次,与智能交通企业和交警部门合作,试点实施复合动态车道管理方法;最后,利用VISSIM构建典型干道系统的仿真测试环境,针对复合动态车道管理方法对于干道系统整体性能的影响进行全面且深入的仿真测试和分析。
[1]Giuliano G,Small K.Is the journey to work explained by urban structure?[J].Urban Studies,1993,30(9):1485-1500.
[2]Frost M,Linneker B,Spence N.Excess or wasteful commuting in a selection of British cities[J].Transportation Research Part A,1998,32(7):529-538.
[3]Zhou X,Chen X,Zhang T.Impact of megacity jobshousing spatial mismatch on commuting behaviors:a case study on central districts of Shanghai,China[J].Sustainability,2016,8(2):122.
[4]Dai D,Zhou C,Ye C.Spatial-temporal characteristics and factors influencing commuting activities of middle-class residents in Guangzhou city,China[J].Chinese Geographical Science,2016,26(3):410-428.
[5]Liu W,Hou Q.Excess commuting in transitional urban China:a case study of Guangzhou[J].Chinese Geographical Science,2016,26(5):599-608.
[6]王德利,杨青山.北京城区交通便捷性空间分异特征及问题分析[J].经济地理,2012,32(10):49-55.Wang De-li,Yang Qing-shan.Analysis of space characteristics and problems of Beijing traffic convenience[J].Economic Geography,2012,32(10):49-55.
[7]全永燊,孙明正.中国大城市交通发展值得注意的几个倾向[J].城市交通,2011,9(2):1-6.Quan Yong-shen,Sun Ming-zheng.Noticeable problems of transportation development in large metropolitan areas in China[J].Urban Transport of China,2011,9(2):1-6.
[8]Wolshon B,Lambert L.Convertible roadways and lanes:a synthesis of highway practice[R].USA:TRB′s National Cooperative Highway Research Program(NCHRP)Synthesis 340,2004.
[9]Zhao J,Liu Y,Yang X.Operation of signalized diamond interchanges with frontage roads using dynamic reversible lane control[J].Transportation Research Part C,2015,51:196-209.
[10]Zhao J,Ma W,Liu Y,et al.Integrated design and operation of urban arterials with reversible lanes[J].Transportmetrica B,2014,2(2):130-150.
[11]Golub A.Perceived costs and benefits of reversible lanes in Phoenix,Arizona[J].ITE Journal,2012,82(2):38-42.
[12]Dey S,Ma J,Aden Y.Reversible lane operation for arterial roadways:the Washington,DC,USA experience[J].ITE Journal,2011,81(5):26-35.
[13]Lambert L,Wolshon B.Characterization and comparison of traffic flow on reversible roadways[J].Journal of Advanced Transportation,2010,44(2):113-122.
[14]Wolshon B,Lambert L.Reversible lane systems:synthesis of practice[J].Journal of Transportation Engineering,2006,132(12):933-944.
[15]Wolshon B,Lambert L.Planning and operational practices for reversible roadways[J].ITE Journal,76(8):38-43.
[16]Wu J,Liu P,Tian Z,et al.Operational analysis of the contraflow left-turn lane design at signalized intersections in China[J].Transportation Research Part C,2016,69:228-241.
[17]Zhao J,Yun M,Zhang H,et al.Driving simulator evaluation of drivers’response to intersections withdynamic use of exit-lanes for left-turn[J].Accident Analysis&Prevention,2015,81:107-119.
[18]Krause C,Kronpraset N,Bared J,et al.Operational advantages of dynamic reversible left-lane control of existing signalized diamond interchanges[J].Journal of Transportation Engineering,2015,141(5):04014091.
[19]Zhou Y,Zhuang H.The optimization of lane assignment and signal timing at the tandem intersection with pre-signal[J].Journal of Advanced Transportation,2014,48(4):362-376.
[20]Ma W,Xie H,Liu Y,et al.Coordinated optimization of signal timings for intersection approach with presignals[J].Transportation Research Record,2013,2355:93-104.
[21]Zhao J,Ma W,Zhang H,et al.Increasing the capacity of signalized intersections with dynamic use of exit lanes for left-turn traffic[J].Transportation Research Record,2013,2355:49-59.
[22]Xuan Y,Daganzo C,Cassidy M.Increasing the capacity of signalized intersections with separate left turn phases[J].Transportation Research Part B,2011,45(5):769-781.
[23]李丽丽,曲昭伟,陈永恒,等.可变车道的控制方法[J].吉林大学学报:工学版,2009,39(增刊1):98-103.Li Li-li,Qu Zhao-wei,Chen Yong-heng,et al.Control strategy of variable lane[J].Journal of Jilin University(Engineering and Technology Edition),2009,39(Sup.1):98-103.
[24]GB51038—2015.城市道路交通标志和标线设置规范[S].
[25]GB50647—2011.城市道路交叉口规划规范[S].
[26]Urbanik T,Tanaka A,Lozner B,et al.Signal timing manual[R].2nd ed.USA:TRB′s National Cooperative Highway Research Program(NCHRP)Report 812,2015.
[27]李克平.交通信号控制指南-德国现行规范(RiLSA)[M].北京:中国建筑工业出版社,2006.
[28]Lee J,Strack E,Park B.Development and evaluation of lane-by-lane gap-out based actuated traffic signal control[R].USA:Virginia Department of Transportation Report UVA-2008-02,2012.
[29]徐洪峰,耿现彩.面向T形交叉口的机动车相位固定最小绿灯时间计算[J].吉林大学学报:工学版,2012,42(3):600-605.Xu Hong-feng,Geng Xian-cai.Absolute minimum green time calculation for vehicles at 3-leg intersection[J].Journal of Jilin University(Engineering and Technology Edition),2012,42(3):600-605.
[30]徐洪峰,王殿海.BRT优先控制交叉口的机动车相位固定最小绿灯时间计算方法[J].吉林大学学报:工学版,2009,39(增刊1):92-97.Xu Hong-feng,Wang Dian-hai.Absolute minimum green time calculation for vehicle phase at signalized intersections with bus rapid transit signal priority[J].Journal of Jilin University(Engineering and Technology Edition),2009,39(Sup.1):92-97.
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
建材发展导向(2022年14期)2022-08-19
警察技术(2022年3期)2022-06-22
建材发展导向(2021年19期)2021-12-06
小天使·四年级语数英综合(2021年3期)2021-05-10
科学大众(2020年10期)2020-07-24
天津建设科技(2020年2期)2020-05-13
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
小学生作文(低年级适用)(2018年4期)2018-05-14
小火炬·智漫悦读(2018年2期)2018-03-13
