
沥青混凝土路面3D智能摊铺应用研究
2018-02-28 03:36祖民星
西部交通科技 2018年11期
祖民星
(广西路桥工程集团有限公司,广西 南宁 530000)
0 引言
随着国内交通领域建设步伐的加快和人民生活水平的不断提高,人们对公路行车安全、舒适性及行车速度等要求越来越高,相应地对路面施工质量要求也更加追求极致。由于沥青路面具有强度高、噪音小、行车舒适及施工方便等优点,在公路工程建设中得到广泛应用。但随着沥青路面建设规模的成倍增长,因施工管理不足及施工方法落后引发的路面病害也越发凸显。因此,本文研究沥青路面3D智能摊铺技术及其应用效果,以增强沥青路面施工过程中的信息化管控,进而提高沥青路面施工质量的可靠度。
1 3D智能摊铺系统配置
3D智能摊铺系统包括基准站设备、机载设备和检测设备三个主要部分[2],具体如下页图1所示。
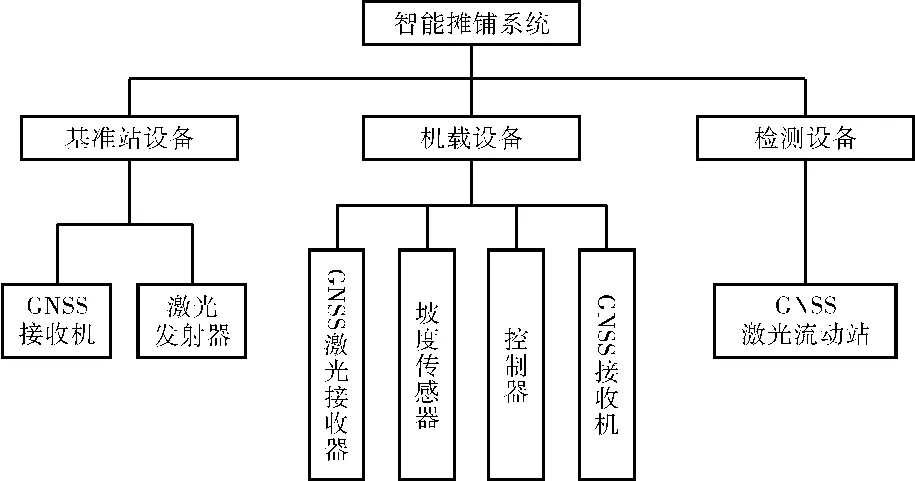
图1 3D智能摊铺系统组成示意图
1.1 GNSS接收机
GNSS接收机通过RTCM格式播发RTK改正数据,为机载设备和检测设备提供厘米级高精度定位基准。
1.2 激光发射器
激光发射器通过Topcon的LaserZone技术发射360°旋转激光墙,为半径300m内的激光接收器提供毫米级高程基准,并具有自动对点和自动整平功能。
1.3 GNSS激光接收器
GNSS激光接收器与摊铺机熨平板采用刚性连接,由GNSS相位中心和激光接收元件的几何中心实时反算出熨平板底部的平面位置与高程,通过液压系统实现对熨平板的毫米级控制。见图2。

图2 GNSS激光接收器安装与连接示意图
1.4 GNSS接收机
GNSS接收机将传感器获取的信号进行处理,计算出实时的平面位置和高程数据,发送给控制器。
1.5 控制器
控制器作为连接GPS系统和摊铺机的核心部分,既是人机交互界面,也是摊铺机控制中心,精度为1~20mm。
1.6 检测设备
检测设备通过实测的平面位置信息和激光接收的高程信息,校核摊铺结果与设计资料,确保摊铺质量符合要求。
2 智能摊铺原理
2.1 RTK原理
RTK(实时动态差分法)是一种常用的GPS测量方法。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站通过数据链接收来自基准站的数据,并采集GPS观测数据,在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不足1s。其原理见图3。
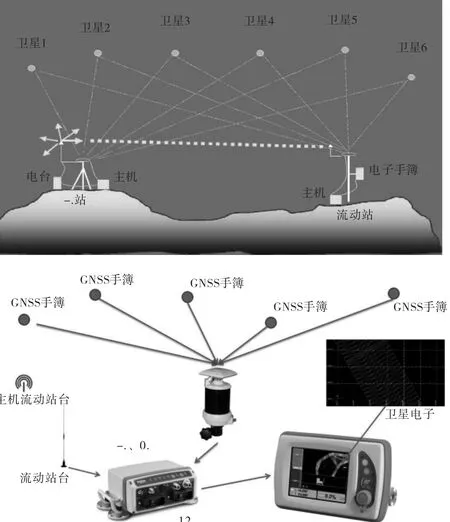
图3 RTK(b原)理示意图
2.2 高程控制原理
控制器计算机根据GNSS RTK获取的精度达1~2cm的定位值,计算出摊铺机控制点所处的位置,并获取此位置的设计高程,然后通过Topcon激光技术计算熨平板摊铺的实际高程(精度在2~3mm),将高程差转换成控制信号,发送给摊铺机找平电磁阀,电磁阀根据信号控制油缸的提升和下降,改变熨平板摊铺角度,实现摊铺高程的精准变化。智能控制过程见图4~6。
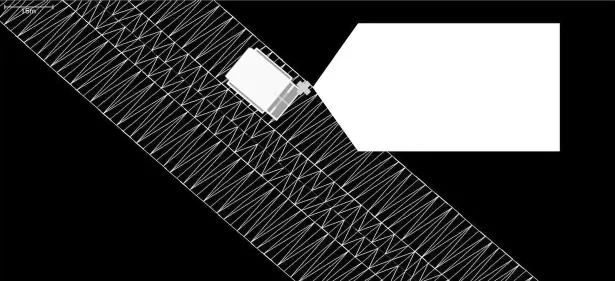
图4 获取设计高程示例图
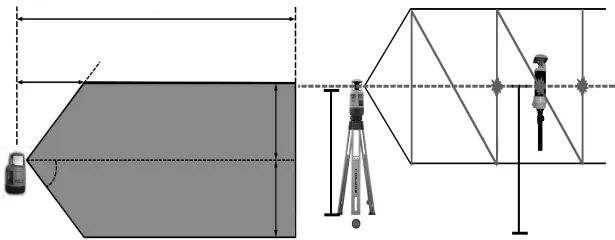
图5 计算实际高程示意图
图6 调整摊铺高程示意图
3 工程应用
3.1 工程概况
南宁市吴圩机场至大塘高速公路2标起于那蒙村,止于团福村,主线全长18.7km,双向四车道,设计速度120km/h,汽车荷载等级为公路Ⅰ级。路面结构为:4cm AN-13C改性沥青混凝土上面层+黏层;6cm AC-20C改性沥青混凝土中面层+黏层;8cm AC-25C沥青混凝土下面层;1cm同步沥青碎石封层+透层;36cm 5%水泥稳定碎石基层;20cm 4%水泥稳定碎石底基层;20cm级配碎石垫层。
施工采用3D智能摊铺机单幅一次性铺筑。
3.2 成品检测
沥青路面施工完成后通过八轮平整度仪以及钻芯取样对3D摊铺效果进行检测[3],结果见表1~2和图7~8。
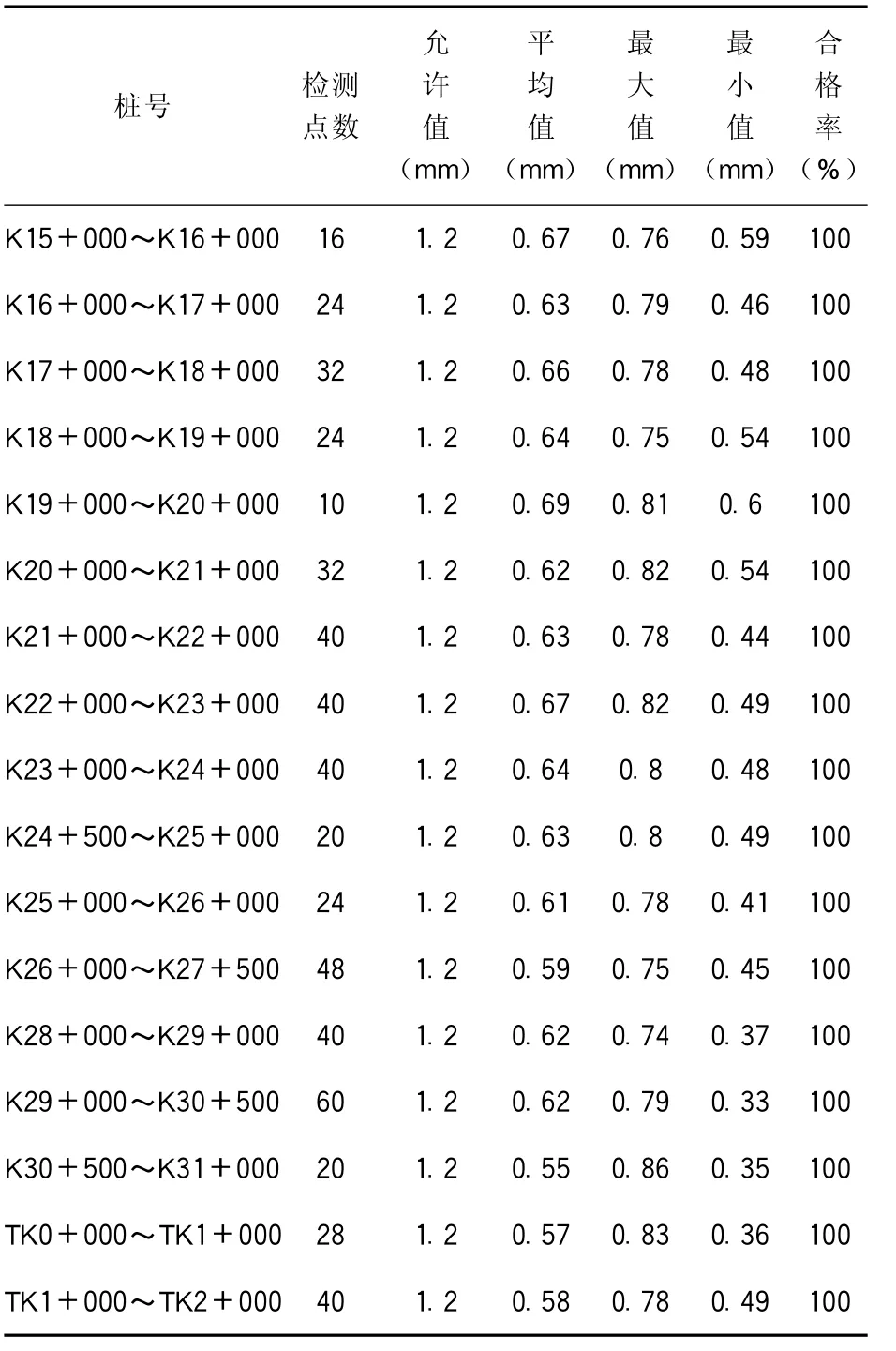
表1 沥青上面层平整度检测结果表
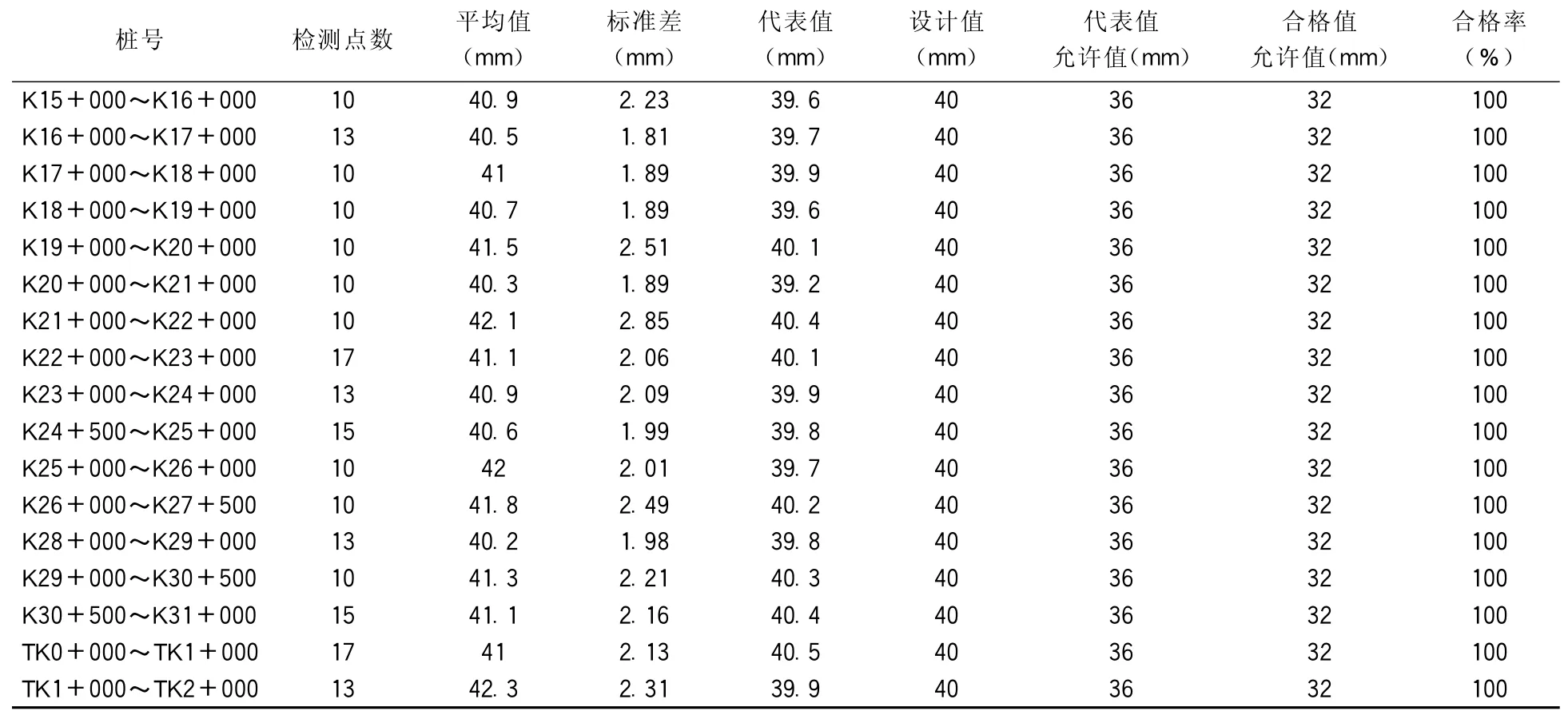
表2 沥青上面层厚度检测结果表
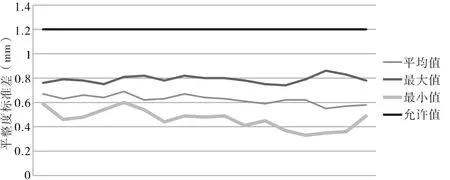
图7 平整度检测折线图

图8 厚度检测折线图
从以上数据可知:
(1)采用3D智能摊铺工艺进行沥青路面施工,平整度均小于允许值(1.2mm),合格率为100%;
(2)厚度均超过代表值允许值与合格值允许值,合格率为100%;
(3)平整度相对平均值波动最大为56%,位于摊铺机起步阶段;厚度标准差最大值为2.31,位于摊铺机起步阶段;
(4)3D智能摊铺全过程的平整度、厚度指标满足要求,但摊铺机起步阶段由于调整熨平板角度,导致指标波动较正常摊铺阶段大,说明智能系统对摊铺机的高程控制是需要过程的,不能一步到位。
4 结语
本文通过对3D智能摊铺系统进行原理分析及工程应用研究,得出以下主要结论:
(1)基于RTK原理的3D智能摊铺无需放桩及架设基准线,施工灵活、高效,实现了自动变坡度施工;
(2)实际工程应用表明,3D智能摊铺系统对平整度、厚度及线形的控制满足规范要求且精度较高,具有实用性及可推广性;
(3)实际应用中3D摊铺在起步阶段和边坡范围的平整度和厚度波动相对较大,但在规范限值以内。
猜你喜欢
石油沥青(2022年4期)2022-09-03
石材(2022年2期)2022-05-25
建材发展导向(2022年2期)2022-03-08
建材发展导向(2019年11期)2019-08-24
建材发展导向(2019年10期)2019-08-24
江西建材(2018年1期)2018-04-04
筑路机械与施工机械化(2015年11期)2015-07-01
筑路机械与施工机械化(2015年11期)2015-07-01
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
