
智能归位椅的设计
2018-02-26 07:53蒋沁宏刘杰彭颖
电子技术与软件工程 2018年15期
蒋沁宏 刘杰 彭颖
摘要
本论文设计了一种室内智能归位椅,以两驱小车为载体,通过陀螺仪MPU9250(加速度传感器十角度传感器)进行定位,地磁和磁场传感器GY-273进行角度测试及位置修正,由PWM控制小车的行动路径,利用位移、角度数据计算、PID调试实现智能归位。通过数据测试与分析,本系统适合在磁场比较少的环境下工作,记录路径时间在20s内完成最优,将MPU9250的采样速率设置为1MHz,GY-273的采样频率为200RHz。系统角度定位的定位精度为2°左右;修正路径后距离误差控制在2-3cm。
【关键词】智能归位 磁场定位 MPU9250 GY-273 路径记录
人工智能自进入人们生活以来,其理论和技术日益成熟,应用领域也在不断壮大,人们越来越离不开人工智能。本文设计方案与现有机器人定位系统中频繁使用的航位推算法不同,本文提出一种通过加速度传感器和角度传感器进行路径记忆、附加指南针进行方位准确定位,应用合理的归位算法设计,使“智能椅子”以最优化的路线返回初始位置的智能归位椅方案。通过对传感器线加速度信息和角加速度信息进行二重积分获得机器人的位置信息这种创新思想的提出,降低设计难度,有利于减小成本。本方案设计出的智能归位椅能达到系统角定位精度2°,距离精度2-3cm的误差范围内,可广泛应用于日常生产生活中。
1 硬件系统
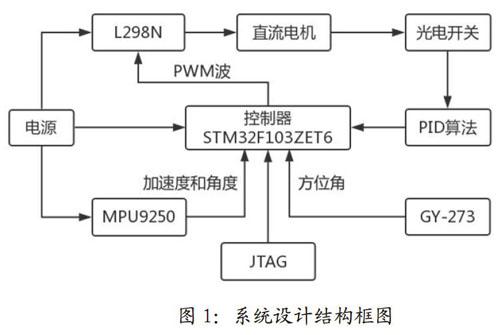
智能归位椅核心部分为小车,其以STM32F103ZET6芯片为主控芯片,外部采用四节1.2V的蓄电池作为系统的供电部分。其中,MPU9250惯性传感器用于加速度和角度的测量,GI-273电子指南针模块用于偏向角的测量,L298N用于直流电机的驱动,光电开关用于轮速的测量。通过加速度传感器和角度传感器进行路径记忆,附加指南针进行方位的准确定位,运用方案设计的归位算法,使“智能椅子”以最优化的路线返回到原始位置。系统结构框图如图1所示。
系统采用闭环控制,通过编码器测速及误差计算后,使用PID算法对小车行走路径进行调节。通过五组测量调试得到的数据,确定KP=18;Ki=5;Kd=0.7。测试得到的数据基本符合模拟得到的数据之间的关系。因此在PID调试中,当三个参数恰好是上面的数值时候,小车可以走直线。
当小车到达终点时,计算出终点和初始点相对的角度,以便于准确定位;利用MDK中的MATH库进行数学计算,设计出最优算法,使椅子能自动回到初始位置。
2 软件系统
2.1 软件设计
设计采用STM32E103ZET6作为主控芯片,利用其内部的SPI接口与MPU9250进行通信;IZC接口与GY-273进行通信,并且将传感器采样数据存储在静态存储器中,用于归位时的数据存储、计算、提取。MPU9250对路径进行实时记录,采样时间为0.2s,将数据准确计算后存储在静态存储器中;GY-271测出准确的偏离角度,使主控芯片产生相应的PWM波实现小车运动路径控制等;当蓝牙HC-05发送归位信号时,小车通过归位算法进行归位,在归位的过程中进行PID调速。
2.2 自动定位、归位算法设计
自动定位通过MPU9250传感器进行加速度和角度测量,测量过程中每0.2S采集一次数据,并将测量得到的数据存储在SDRAM中。自动归位采用己计算出的X、Y,通过相应PWM占空比对应的实际速度,计算出需要的时间,在指定的时间小车可以走到准确的位置并且调整好方向。经过测试,本次设计PWM占空比采用60%,周期为20ms。
3 调试及结果分析
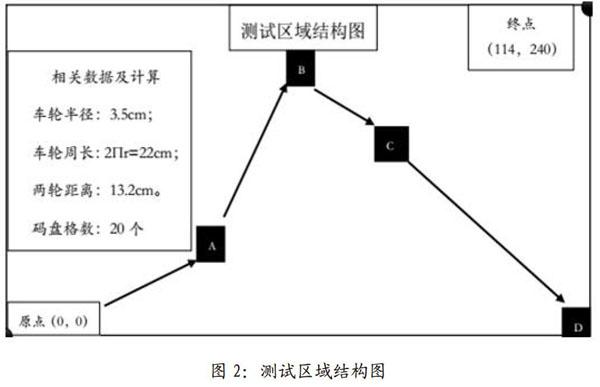
本设计的测试需要在室内小空间且磁场干扰较小的环境中进行,图2为实验测试区域结构示意图。
3.1 位移计算
通过对传感器测试数据分析后发现,为确保实验所采集数据的一致性,需调整加速度传感器的行进方向与传感器的X轴方向保持一致,同时需要将GY-273的X轴方向与MPU9250的方向保持一致。
在数据存储的过程中,应先对采集的数据进行计算。对于数据的计算,采用下示方法分别对加速度和角度进行计算。示意图如图3所不。
3.2 自动归位检测及调试
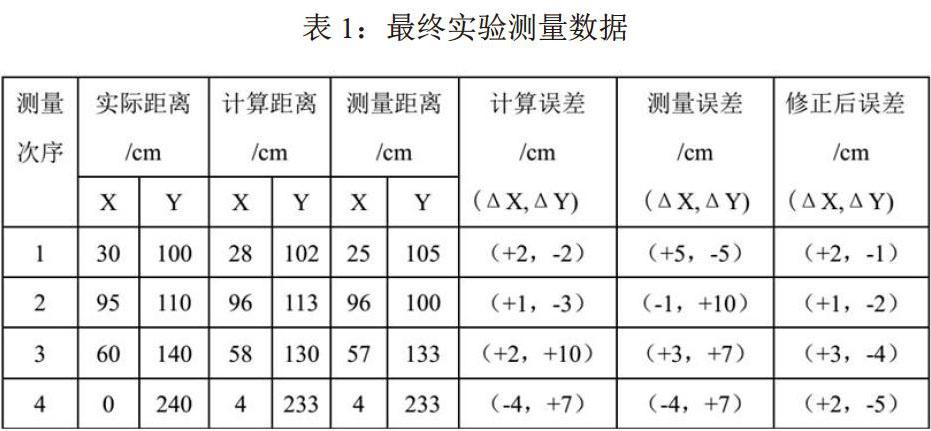
本次设计的数据总共有三种来源,第一种是来自实际测量,这类数据是在测量之前在区域内放置坐标轴可以实时的检溅第二种数据,是通过传感器测量的数据传输到串口助手,经过物理计算之后得到的数据,此类数据借助于MATLAB进行的计算的,但是引入了人工误差;第三种数据是通过在芯片内部的算法的得到的,将每次更新出的ΔX、ΔY,得到最终的X和Y。对三种数据进行测量,分别测量四组数据进行分析和算法修正,最终测量数据如表1所示。
4 结束语
本文设计的智能归位椅能够像机器人一样完成室内定位和自动归位,具有广泛的应用前景。在室内定位系统中,创新的设计出一种通过加速度、角度以及指南针传感器来实现路径记忆、智能归位的方案,在很大程度上降低了产品成本。实验表明,本文设计的智能归位椅与现有类似产品相比,设计简单,价格低廉,系统可靠性高,具有很强的通用性,非常適合在办公场所中应用,设计思路和概念可广泛应用于智能家居中。
参考文献
[1]庄晓东.复杂环境中基于人工势场优化算法的最优路径规划[J].机器人,2003(06).
[2]徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001(03).
[3]赵钟伟.基于磁场信息的定位原理及应用[D].浙江大学,2014.
[4]Learning Path Planning Using GeneticAlgorithm Approach.Chaochang Chiu,2006.
猜你喜欢
当代水产(2022年6期)2022-06-29
作文小学高年级(2022年3期)2022-04-20
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
汽车观察(2018年12期)2018-12-26
福建中学数学(2018年1期)2018-11-29
金桥(2018年4期)2018-09-26
电子制作(2018年8期)2018-06-26
