
光伏幕墙智能清扫系统的研究与设计
2018-02-20 06:26周秀珍
现代制造技术与装备 2018年12期
周秀珍
(长江工程职业技术学院,武汉 430212)
随着光伏发电技术的不断发展,不仅在屋顶上能看到光伏板,连很多高楼幕墙都直接采用光伏板进行装饰。虽然光伏发电技术能够有效缓解能源紧张问题,但也存在着一些新问题,例如光伏组件面积大,且必须暴露在空气中,空气中灰尘堆积在光伏组件中,对光伏发电效率产生影响,而经常清洗光伏板电能输出明显比未清洗的高很多。因此基于提高光伏发电功率的初衷,研究和设计光伏幕墙智能清扫系统具有重要意义。
目前,光伏板清洗主要采用人工清洗、工程车清洗以及自由行走机器人清洗等方式,但这些清洗方式主要是针对于屋顶和太阳能电站的光伏板,而对于垂直幕墙来说,上述方式并不实用,虽然一些光伏幕墙采用人工水洗方法,但该方式不仅危险系数高,而且成本也高。本文主要针对光伏幕墙清扫系统进行研究,并对光伏幕墙智能清扫系统软硬件系统针对性设计。
1 光伏幕墙智能清扫系统硬件设计
本光伏幕墙智能清扫系统主要由清扫执行部分和清扫运行部分组成。
清扫部分主要完成光伏幕墙光伏板清扫工作,具体来说就是针对光伏组件上的灰尘进行清扫,本系统清扫方法是通过给海绵喷水,然后对光伏板表面进行擦拭现,具体清扫执行部分设计如图1所示。图中水管实现喷水工作,海绵主要对幕墙灰尘进行擦拭。清扫时,水管先喷水10s,海绵下上来回运动3次;接着整个清扫部件下行一小段距离,再喷水,再下上来回运动3次,又完成一段面积的光伏板清洗工作。依次重复上述步骤,直到整个垂直幕墙清扫完成。水管中的水通过注水软管引入,钢丝绳牵引清扫部件来回动作。
清扫运行部分主要实现清扫部件运行功能,具体如图2所示。为了保证清扫部件在垂直墙面上能来回运动,且不掉坠,本设计对清扫执行部分进行了重量平衡设计。清扫部分和对重块通过钢丝绳两端进行连接,钢丝绳卷在主轴上,当主轴转动时,对重移动,清扫部件随之移动,从而实现清扫部件移动操作。主轴通过齿轮连接电机,当控制电机正转和反转时,主轴实现转动。软水管也卷在主轴上,当水阀打开,水管喷水。另外,在主轴上还安装了抱闸装置,电机断电时闸阀抱死,得电时闸阀松开。同时在光伏板顶端和末端安装了上下限位传感器,保证执行部件和对重不运行到界限外。
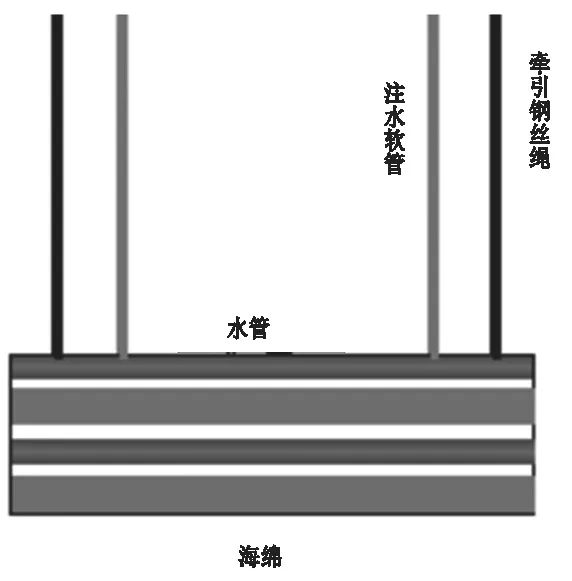
图1 清扫执行部分
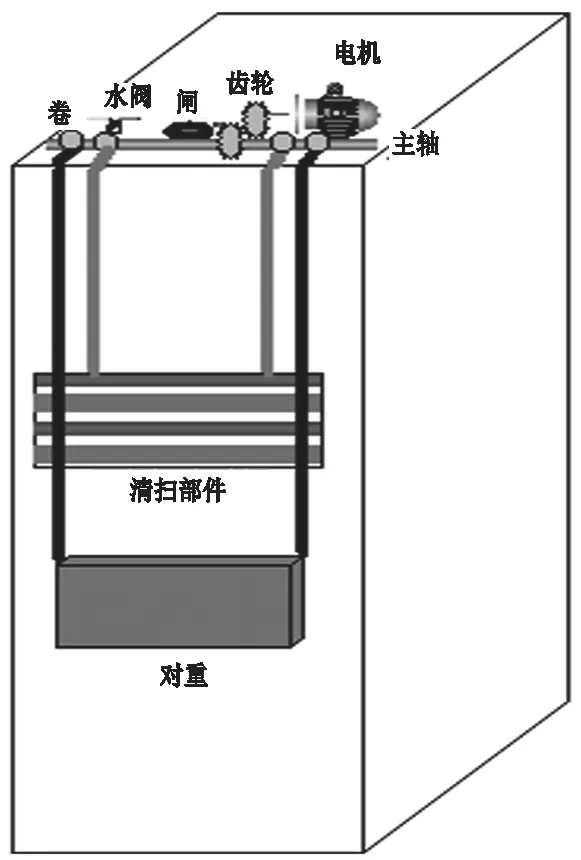
图2 清扫运行部分
2 光伏幕墙智能清扫系统软件设计
本系统软件主要通过核心控制部件PLC实现智能清扫,PLC通过接收控制信号,控制喷水阀出水,抱闸系统完成智能清扫工作。具体I/O点包括输出点清洗开关(IO.O)、上限位(IO.1)、下限位(IO.2)、输出点主轴电机正转(QO.O)、输出点主轴电机反转(QO.1)、喷水阀(QO.2)和抱闸系统(QO.3)。
智能清扫系统清扫流程如图3所示,打开清洗开关(IO.O)控制喷水阀(Q0.2)喷水10s,闸阀抱死;10S后闸阀松开,主轴电机(QO.1)反转5s清扫部件下行,再正转5s清扫部件上行,来回3次,实现对光伏组件的擦洗;接下来主轴电机(QO.1)反转5s清扫部件下行,准备下一段清扫,喷水阀(Q0.2)再次喷水10s。重复刚才擦洗动作,直到碰到下限位(IO.2),停止整个清扫工作。
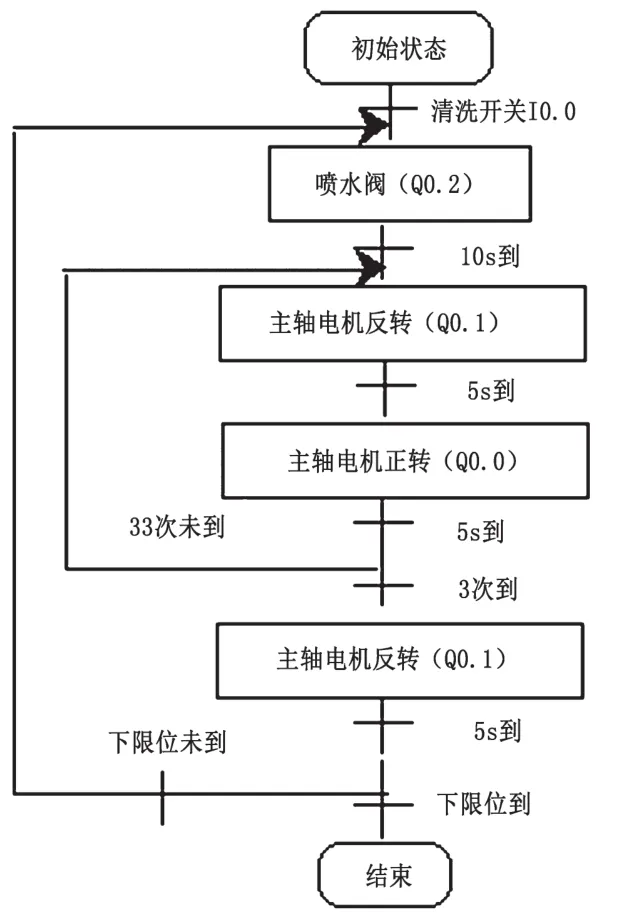
图3 智能清扫系统清扫流程图
3 结语
本文所设计光伏智能清扫系统采用对重平衡设计原理,缓解了垂直幕墙清扫容易发生掉坠的安全问题,采用PLC可实现实现幕墙自动清扫,较好完成了光伏幕墙清扫工作。但本设计也存在一定局限性,即只考虑了规则幕墙清扫,对于不规则幕墙清扫则需要相关设计者,根据实际情况对设计方式进行改变。
猜你喜欢
煤气与热力(2021年9期)2021-11-06
建材发展导向(2021年10期)2021-07-16
课堂内外(小学版)(2021年3期)2021-01-17
特别文摘(2018年6期)2018-08-14
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
中国建筑金属结构(2018年4期)2018-05-23
小太阳画报(2018年8期)2018-05-14
科技资讯(2016年6期)2016-05-14
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
