
数控机床主轴PLC控制仿真与实现
2018-02-18 01:29范华
中学课程辅导·教师教育(上、下) 2018年23期
范华


摘 要:PLC(可编程逻辑控制)控制是数控机床控制电路中非常重要的组成部分之一,在设计或教学过程中由于受实验条件、教学环境的限制很难去展开。采用Multisim12软件的Ladder Diagrams模块,以主轴正反转控制为典型案例建立Multisim12电气仿真模型,设计梯形图通过设置电气参数进行系统仿真,利用自有测试仪器观察仿真结果,最后在真实机床XK5025上实现。该方法不需要大量的仪器设备,降低教学成本,同时可以现场模拟展示,人人动手,具有一定的普适性。
关键词:Multisim12;PLC;数控机床;仿真
中图分类号:G712 文献标识码:A 文章编号:1992-7711(2018)23-066-3
数控机床是典型的机电一体化产品,数控装置将加工程序的代码信息经运算处理后发出各种控制信号完成各轴控制运动[1]。其中PLC的作用是接收零件加工程序的开关功能信息(辅助功能M、主轴转速功能S、刀具功能T)、机床操作面板上的开关量信号和机床侧的开关量信号进行逻辑处理,完成输出控制功能,实现各功能及操作方式的联锁。
数控机床是一个相对复杂的机电控制系统,成本较高,不可能大批量购置,在实验实训过程中很难实现人手一台,而且在实验实训过程中学生不太熟悉,操作的盲目性会导致机床的硬件损坏、数据丢失等,鉴于以上原因,导致许多高校在教授PLC在数控机床上的应用只能局限于书本教学或者许多学生扎堆在一、二台机床上,教学效果不理想。目前也有许多专用的PLC编辑调试软件,比如Fanuc数控系统FAPT Ladder III软件可以编制梯形图,只具有在线监视和诊断功能[2],但不能实现离线脱机仿真,仍然离不开机床硬件的支持。NI公司的Multisim12软件具有继电器和梯形图功能仿真模块,很好的解决书本知识与实验实训相脱节的难点问题,学生可以很方便地把学到的理论知识用计算机语言真实的再现出来,并且可以用虚拟仪器测量仿真实验的结果验证设计的可行性,极大地提高了学习热情和积极性,真正地从理论知识的灌输到理实一体的转变。
一、软件介绍
Multisim12是美国国家仪器(National Instruments,简称NI)最近推出的用于电路设计和电子教学的交互式仿真软件,不仅提供电子电路的虚拟仿真,而且可以实现LabView虚拟仪器、单片机仿真、VHDL和VerilogHDL建模、Ultiboard设计电路板等功能[3]。Multisim12主要的功能如下[4]:
(1)提供交互式仿真环境,用户通过仿真结果理解电路的概念无须考虑应用环境。
(2)具有22种与真实仪器相同功能的虚拟测量仪器和20个功能强大数据分析工具,便于实验数据的测量与分析处理。
(3)通过VHDL语言、Ladder语言可以捕捉并仿真PLD(可编程逻辑设备)、PLC(可编程逻辑控制器)数字电路,很容易实现理论知识到真实实验的过度。
(4)包含2万多部件库,有些部件具有交互式(如开关和电位计)、动画效果(如LED和7段数碼管)、虚拟参数设置和3D效果的部件等。
目前Multisim12软件绝大多数应用在模拟电路和数字电路中,但在继电器电路和PLC控制电路中的应用相关研究较少。本文从Fanuc 0i系统的XK5025数控铣床的主轴正反转控制为例,研究和探讨Multisim12软件在数控机床PLC控制中的应用。
二、机床主轴正反转PLC控制仿真
1.正反转继电器电路特点
主轴电机的正反转是机床中最常见的控制功能,经典的继电器电路[5],按下控制回路中SB2按钮,交流接触器KM1线圈接通,正转回路中KM1常开辅助触点吸合实现电路自锁,反转回路中KM1常闭辅助触点断开实现互锁,同时主回路中KM1交流接触器主触点闭合,主轴电动机正转;同理按下SB3按钮,KM2常开辅助触点吸合自锁,KM2常闭辅助触点断开互锁,主回路中KM2主触点闭合,主轴电动机反转。按下SB1停止按钮断开控制回路,主轴电机停转。
由于继电器电路线路复杂,触点多,故障率高,调试、修改不方便等原因,目前在数控机床上逐渐被PLC控制电路所取代,继电器电路中的大量的中间继电器、时间继电器、计时器等被PLC中的语句表、梯形图等所替代,线路大大简化,抗干扰能力强,设计、修改灵活方便。
在FAPT Ladder III软件中梯形图只能通过RS232C串口与机床数控系统连接实现在线监控和调试,无法通过软件本身验证梯形图编写是否正确性,在实验实训中学生没有更加形象、直观的印象。NI公司的Multisim12软件具有Ladder Diagrams模块,理解PLC顺序控制的原理就能实现PLC梯形图的仿真模拟,上手容易吸收快。
2.交流接触器子模块的建立
在Multisim12中没有现成的交流接触器模块,文献[3][6]采用ElectroMechanical库中的延时继电器TIMEDCONTACTS构建,但是仿真时总有一个时间延时;文献[4][7]采用COILS_RELAYS中的MOTOR_4A构建,输入输出接口太多,仿真时不稳定。本文采用基本元件库BASIC中的RELAY来构建,简单易实现。为了系统显示更加简洁,可以建立子模块,方法是选中各元器件鼠标右键通过“Replace by subcircuit”来建立子模块,子模块内部结构,子模块封装,A、A1分别是接触器控制回路线圈的输入、输出端子,x、x1,y、y1,z、z1分别是交流接触器主触点的输入、输出端子。为了便于线路的连接,可通过右击封装Edit symbol / title block布置子模块引脚的位置。
3.PLC控制正反转仿真模型的建立
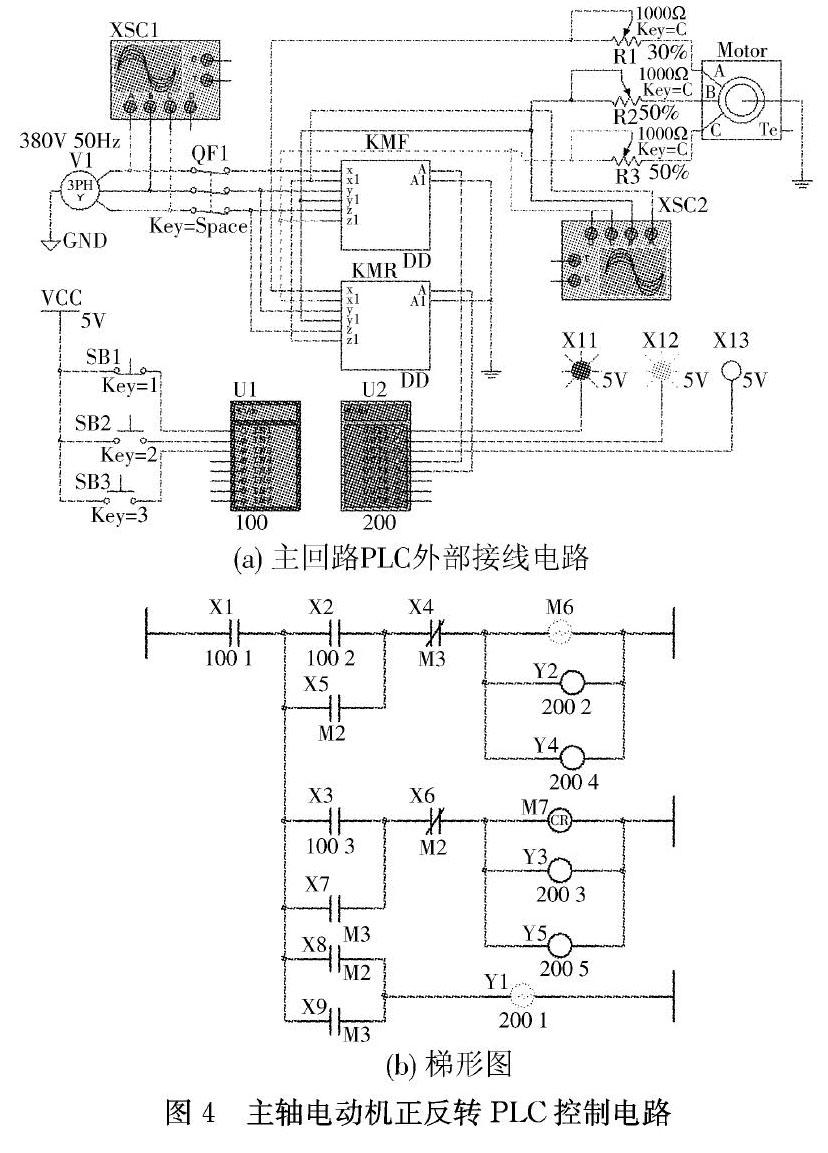
根据继电器电路的原理图建立基于Multisim12的PLC控制正反转仿真模型。(a)图中主回路电源采用380V 50HZ的Y型三相交流电源,QF1为主回路断路器,KMF、KMR分别为主回路中控制正、反转的交流接触器,R1、R2、R3为三个可变电阻器,分别模拟电动机的三相负载[4]。控制回路中SB1、SB2、SB3分别为停止、正转和反转按钮,U1、U2分别为PLC的I/O模块,为了直观反映电机的工作状态,采用探针x11、x12、x13亮灭分别显示电动机停止、正转和反转的状态。(b)图中x1、x2、x3分别为停止、正转和反转按钮对应触点的状态,Y1、Y2、Y3分别为停止、正转和反转输出线圈状态。
4.PLC控制正反转模型的仿真
点击“Run(F5)”开始仿真:
(1)探针x11、x12、x13都不亮,示波器XSC1有电源输入信号,如图5所示,示波器XSC2无输出波形;
(2)按下按钮SB2,触点x2闭合,中间继电器线圈M6接通后x5自锁,且输出线圈Y1接通,电源探针x1(红色)灯亮,同时输出线圈Y2、Y4接通,Y4控制交流接触器KMF闭合主轴电机开始正转,Y2控制正转探针x12(绿色)灯亮;
(3)此时按下按钮SB3,触点x3闭合,但是常闭触点M2在正转时断开的,故反转被互锁。
(4)按下按钮SB1,触点x1断开,中间继电器触点x2被解锁,M6、Y2、Y4被线圈切断,电源探针x1熄灭,交流接触器KMF断开,主轴电动机停止。
(5)按下按钮SB3,触点x3闭合,中间继电器线圈M7接通后x7自锁,且输出线圈Y1接通,电源探针x1点亮,同时输出线圈Y3、Y5接通,Y5控制交流接觸器KMR闭合主轴电机开始反转,Y3控制反转探针x13(蓝色)灯亮;
(6)此时若按按钮SB2,触点x2接通,但常闭触点x4被互锁断开,正转无法接通。
仿真过程中电动机的三相输入波形如图6所示,从图中可以看出,正、反转的波形相序相反(粉色、绿色两相相序相反),仿真的过程与真实电路的工作过程相一致。
三、PLC控制正反转在数控机床主轴上的实现
在自主改造的数控铣床XK5025,数控装置采用日本FANUC 0i系统,具有内装式PLC,驱动装置采用西门子MICROMASTER 420变频器,原理图如图7所示。中间继电器触点KA3、KA4分别控制主轴电动机正、反转,中间继电器线圈KA3、KA4在PLC输出回路中,如图8所示。梯形图如图9所示,X10.3、X10.1、X10.0分别为主轴正转、停止和反转按键,
Y30、Y3.1分别是电动机主轴正反转线圈,SFRA、SRVA是CW、CCW指令信号,Y7.5、Y6.4为电机正反转指示灯,经调试,满足数控铣床正反转控制的要求。
四、结论
通过Multisim软件对数控机床PLC控制电路的仿真,验证方案设计的可行性,缩短在线调试的周期,同时在教学过程中可以离线仿真,节约教学投入成本,教学组织容易实施,避免初学者不熟悉导致硬件平台的损坏,另外Multisim是基于Spice(Simulation Program with Integrated Circuit Emphasis)电路仿真软件,提供非常逼真的测试仪器仪表,比如探针、安捷伦(Agilent)示波器、泰克(Tektronix)示波器等,仿真形象、直观,学生上手容易,经过一年多的教学实践,学生反映效果良好。
[参考文献]
[1]王侃夫主编.数控机床控制技术与系统[M].北京:机械工业出版社,2007(08).
[2]BEIJINGFANUC PMC PA1/SA1/SA3 梯形图语言编程说明书[Z],BEIJINGFANUC,2003.
[3]王晗.基于Multisim10的接触器仿真设计与实现[J].实验技术与管理.2010,3(27).
[4]聂典,李北雁等编著.基于NI Multisim 11的PLC/PIC/PLC的仿真设计[M].北京:电子工业出版社,2011(04).
[5]张铮主编.机电控制与PLC[M].北京:机械工业出版社,2008(01).
[6]王晗.基于Multisim10的三相电机正反转控制仿真实验[J].实验科学与技术,2009,10(20).
[7]万琰,谢海良.基于Multisim10的电机正反转控制电路的设计与仿真[J].漯河职业技术学院学报,2009,9(8).
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
消费导刊(2016年11期)2017-10-19
现代职业教育·中职中专(2017年12期)2017-08-13
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
中小企业管理与科技·中旬刊(2014年12期)2015-01-22
