基于下垂控制的微电网控制策略研究
2018-02-13 08:43:48王红艳
许昌学院学报 2018年12期
王红艳
(许昌学院 电气工程学院,河南 许昌 461000)
随着太阳能发电、风力发电等新能源发电技术的不断发展,以分布式发电技术为基础的微电网得到广泛关注[1].微电网将分布式电源、负荷、储能装置、控制装置等整合为一个独立的发配电系统[2, 3],可以在并网和孤岛运行模式间灵活切换,利用分布式微源的出力,提高电能质量.微电网应具备灵活可靠的控制系统,下垂控制具有不需要互联通信线、运行模式切换时不用改变控制策略等优点[4, 5],成为研究热点.
1 下垂控制的基本原理
下垂控制是模拟传统发电机的功角特性,采用P-f和Q-U下垂控制,使微电网得到稳定的电压和频率[6].P-f和Q-U下垂控制的表达式为
(1)
其中,U为公共连接点处电压的有效值,Ui为第i个分布式微电源输出相电压的有效值,θi为第i个分布式微电源的输出电压与公共连接点处电压之间的相角差,Xi为第i个分布式微电源至负载间的传输线路的电抗,Pi和Qi分别为第i个分布式微电源输出的有功和无功功率.
由式(1)可知,相角差θi决定分布式微电源有功功率Pi的传输,Pi与θi成正比,Pi由相位超前的点传输至相位滞后的点;分布式微源的输出电压与公共连接点处电压的幅值差(Ui-U)决定分布式微电源无功功率Qi的传输,Qi与 (Ui-U)成正比,Qi由电压高的点传输至电压低的点.
频率f和相角θ之间的关系为
(2)
由式(1)、(2)可知,通过控制分布式微源输出的有功功率可以控制其输出电压的频率和相角,通过控制分布式微源输出的无功功率可以控制其输出电压的幅值.因此微电网下垂控制的表达式为
(3)
其中,f和U、P和Q分别为分布式微电源输出电压的频率和幅值、输出的有功和无功功率,f0和U0、P0和Q0分别为分布式微电源输出电压的频率和幅值的额定值、输出的有功和无功功率的额定值,m、n分别为有功和无功功率的下垂系数.
2 基于下垂控制的微电网控制系统设计

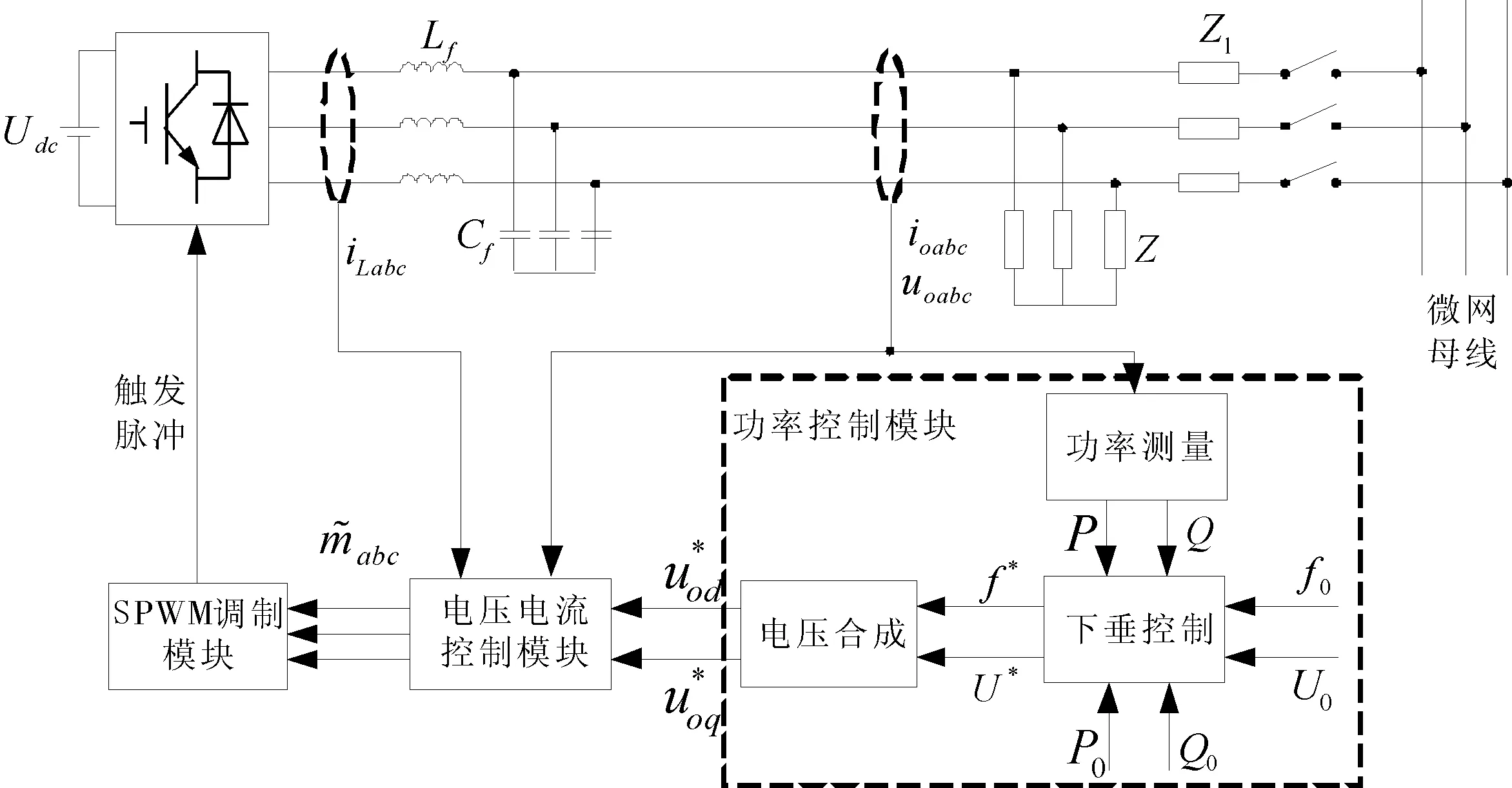
图1 基于下垂特性的微电网控制结构图
2.1 功率控制模块
功率控制模块包括功率测量、下垂控制、电压合成三个环节.功率测量环节采集分布式微源输出的三相电流信号ioabc和三相电压信号uoabc,分别进行abc/dq坐标变换后得到两相旋转dq坐标系下的电流iodq和电压uodq.根据瞬时无功功率理论可得,在两相旋转dq坐标系下微源逆变器输出的瞬时有功功率和瞬时无功功率分别为
(4)
为了提高输出功率的稳定性,应采用低通滤波器滤除瞬时功率中的高频纹波,将平均功率作为下垂控制环节的输入信号.因此可得功率测量环节框图如图2所示.

图2 功率测量环节框图

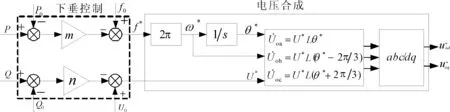
图3 下垂控制环节和电压合成环节框图
2.2 电压电流控制模块
为了合理设计电压电流控制模块,首先需要建立微源逆变器的数学模型.在两相旋转dq坐标系下微源逆变器的数学模型为
(5)
(6)
电压电流控制模块采用最典型的双闭环控制策略,以电感电流控制为内环,以电容电压控制为外环.电压电流双闭环控制能够对电压和电流进行精确地动态控制,改善微源逆变器输出的三相电能.由公式(5)、(6)可知,dq坐标系下逆变器的d轴和q轴电量相互耦和,这将给控制系统的设计带来困难.因此,需要首先对逆变器的d轴和q轴分量进行解耦,使其相互独立,然后分别对d轴和q轴分量进行PI控制.
为了对电感电流进行解耦,令式(5)中微源逆变器的输出电压为
ud=uid+uod-ωLfiLq,uq=uiq+uoq+ωLfiLd.
(7)
对电容电压进行解耦,令电感电流参考值为
(8)
将式(7)、(8)分别代入式(5)、(6),可以看到逆变器的d轴和q轴分量实现了完全解耦.
电流内环采用P控制,以提高系统的响应速度,即
(9)

电压外环釆用PI控制,使逆变器的输出电压保持稳定,即
(10)

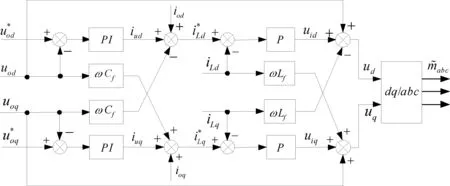
图4 电压电流控制框图
3 MATLAB仿真
在MATLAB/Simulink中建立基于下垂控制的微电网仿真模型,如图5所示.微源逆变器的输出电压幅值的额定值为311 V,额定频率为50 Hz,额定有功功率为75 kW,额定无功功率为0,有功功率的下垂系数为10-5,无功功率的下垂系数为3×10-4,初始本地负载功率为25 kW.

图5 基于下垂控制的微电网仿真模型
系统运行至0.2 s时由并网模式切换至孤岛模式,0.4 s时本地负载突增50 kW,运行仿真模型可得如图6和图7所示的波形.图6为微源逆变器的输出电压波形和输出电流波形,可以看出:在微网从并网模式切换为孤岛模式、负载突增的过程中,微网逆变器的输出电压能够始终保持稳定;微网逆变器的输出电流在并网模式下比孤岛模式下的幅值要大,即并网运行时微网在带动本地负载的同时向大电网输出功率.0.4 s时本地负载由25 kW突增至75 kW,微网逆变器的输出电流由50 A迅速上升至150 A,与理论值完全一致.
图7依次为微源逆变器输出的有功功率波形和频率波形. 从图7可以看出:0.2 s之前并网运行时,微网输出的有功功率大于本地负载功率25 kW,多出的功率输送至大电网;孤岛运行时,微网输出的有功功率等于本地负载功率25 kW,频率为50.5 Hz;0.4 s后本地负载突增至75 kW,微网输出的有功功率迅速跟踪负载功率升至额定功率75 kW,频率迅速下降为额定频率50 Hz.仿真结果证明了下垂控制策略的正确性和有效性.
4 结语
根据下垂控制的基本原理,将下垂控制与电压电流双环控制有机结合,设计微电网的控制系统.通过搭建微电网及其控制系统的仿真模型,实现微电网的下垂控制策略.仿真结果表明所设计的基于下垂控制的微网系统具有稳态性能好、动态响应速度快、适应能力强等特点,验证了基于下垂控制的微网控制策略的正确性和有效性,为后续微电网运行控制的研究打下了良好的基础.

图6 微网逆变器的输出电压和电流波形
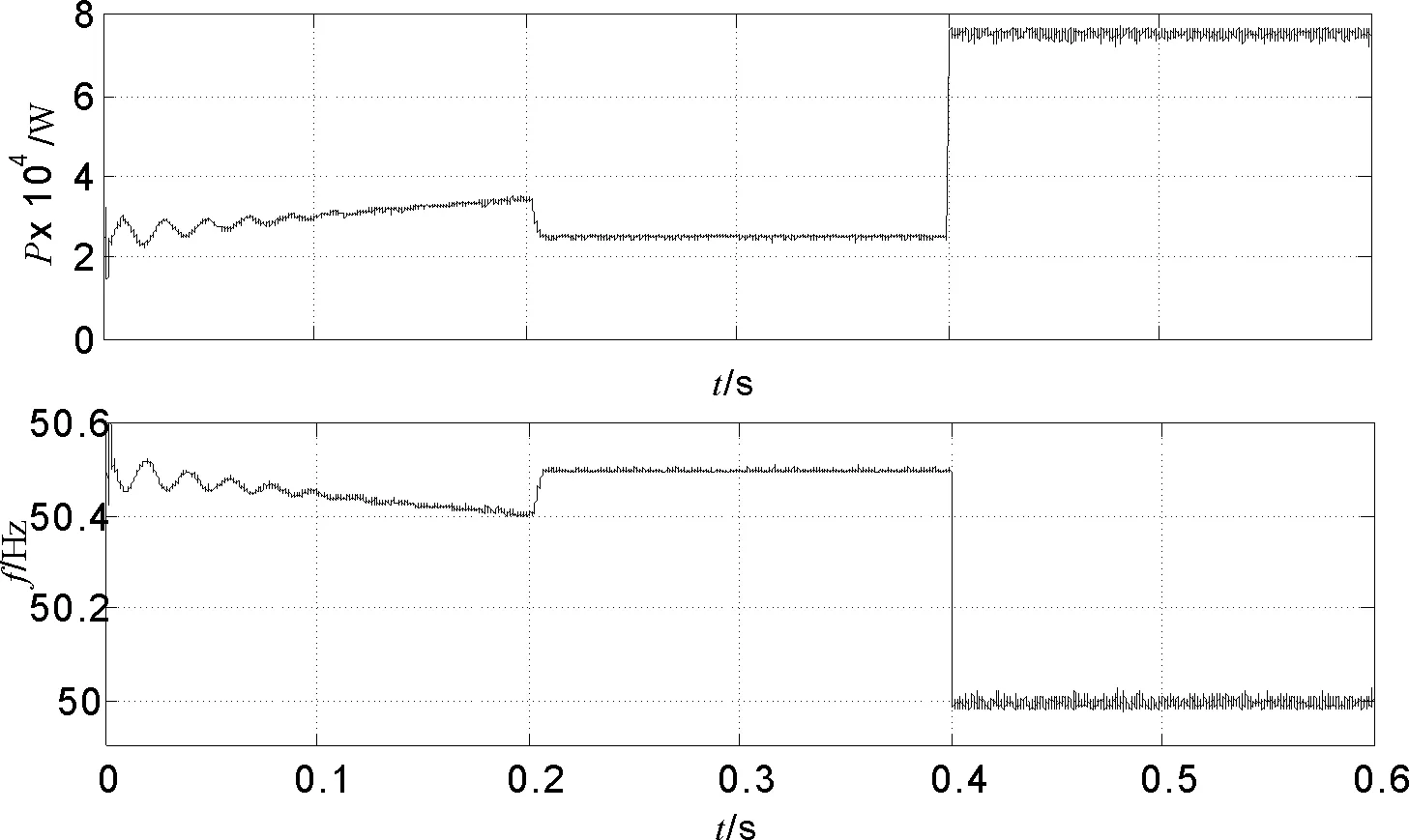
图7 微网逆变器的输出有功功率和频率波形
猜你喜欢
通信电源技术(2018年5期)2018-08-23 01:15:48
电子制作(2017年7期)2017-06-05 09:36:13
通信电源技术(2016年6期)2016-04-20 06:21:15
电测与仪表(2016年15期)2016-04-12 00:30:52
电源技术(2015年5期)2015-08-22 11:18:30
电测与仪表(2015年18期)2015-04-12 00:45:22
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年1期)2015-04-09 12:02:38
电测与仪表(2015年7期)2015-04-09 11:40:10
电测与仪表(2014年12期)2014-04-04 12:10:18