多旋翼植保无人机喷雾均匀性试验
2018-02-13 12:14刘道奇余永昌张开飞董慧锋赵彬彬秦超彬邢金龙
江苏农业科学 2018年24期
刘道奇, 余永昌, 张开飞, 董慧锋, 赵彬彬, 秦超彬, 邢金龙, 李 赫
(1.河南省农业科学院长垣分院,河南长垣 453400; 2.河南农业大学,河南郑州 450002)
近年来,我国农用植保无人机发展迅速,据农业部相关部门统计,截至2016年5月,全国在用的农用无人机共有178种,全国农业航空技术95%以上用于航空植保作业[1]。其中,多旋翼植保无人机受到越来越广泛的关注,主要是由于其制造原材料成本的降低,作业极为高效,并且对人体造成的污染较少,采用低量或超低量喷雾可以降低农药使用量,提高农药利用率,同时还能减少作业过程对环境的污染[2-9]。多旋翼植保无人机在农业植保的应用方面愈加频繁,目前国内已经有许多中小型企业进行多旋翼植保无人机的研发与生产。多旋翼植保无人机在我国发展年限较短,多数由企业拼装而成,整机及零部件缺乏相应的行业制造规范,作业可靠性不高,飞行控制系统依然具有一定的缺陷,在作业过程中易发生各种事故,并且缺乏熟练的飞手进行植保作业,这些问题都造成了多旋翼植保无人机的作业效果一直无法得到广大农民的认可,其作业参数对作业效果的影响一直缺乏相应的理论和数据支持。本研究在现有条件下,对3W16-10型8轴16旋翼植保无人机进行进一步试验测试,主要探究飞行高度、飞行速度、喷雾压力对喷雾均匀性的影响,以期为多旋翼植保无人机喷雾作业参数的确定和作业环境的选择提供理论依据,减少多旋翼植保无人机施药过程中的农药损失,提高农药利用率。
1 材料与方法
1.1 材料与设备
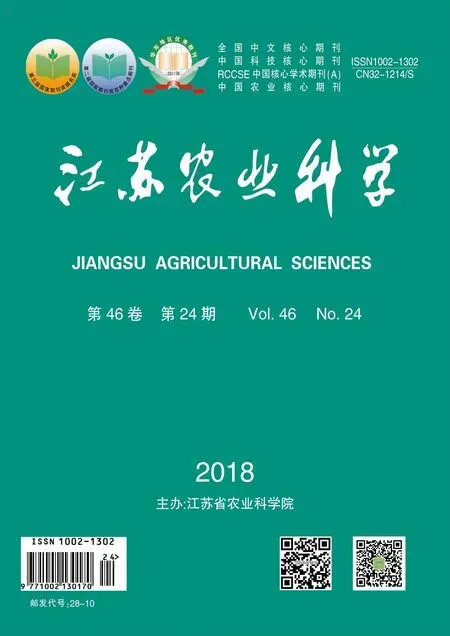
试验采用的材料与设备由3W16-10型多旋翼植保无人机及其配套喷雾系统、雾滴收集装置、环境参数检测装置、数据采集及配套分析系统组成(表1)。多旋翼植保无人机及其配套喷雾系统作业机械为3W16-10型多旋翼植保无人机(图1-a),采用8轴16旋翼设计结构,机身及螺旋桨材料以碳纤维为主,飞行控制采用大疆创新科技有限公司生产的A2飞行控制系统,支持失控保护和低电压保护,具有智能控制及自稳功能等;喷雾系统包括气泵、控制器、输液管及喷头等装置。雾滴收集装置(图1-b)尺寸为510 cm×510 cm×210 cm,装置主体由不锈钢方钢(郑州海绵电动门商行)搭建而成。在其2个侧面(每个面18个点)和1个底面(27个点)用铁丝共分割出63个点,用于固定雾滴收集装置,雾滴收集装置选用定性滤纸(辽宁省抚顺市民政滤纸厂)和培养皿(江苏省扬州市光华医疗器械有有限公司)。将滤纸用燕尾夹固定在各个点上,设置3组重复,用以消除单次试验可能引起的误差。

表1 3W16-10型多旋翼植保无人机主要技术参数
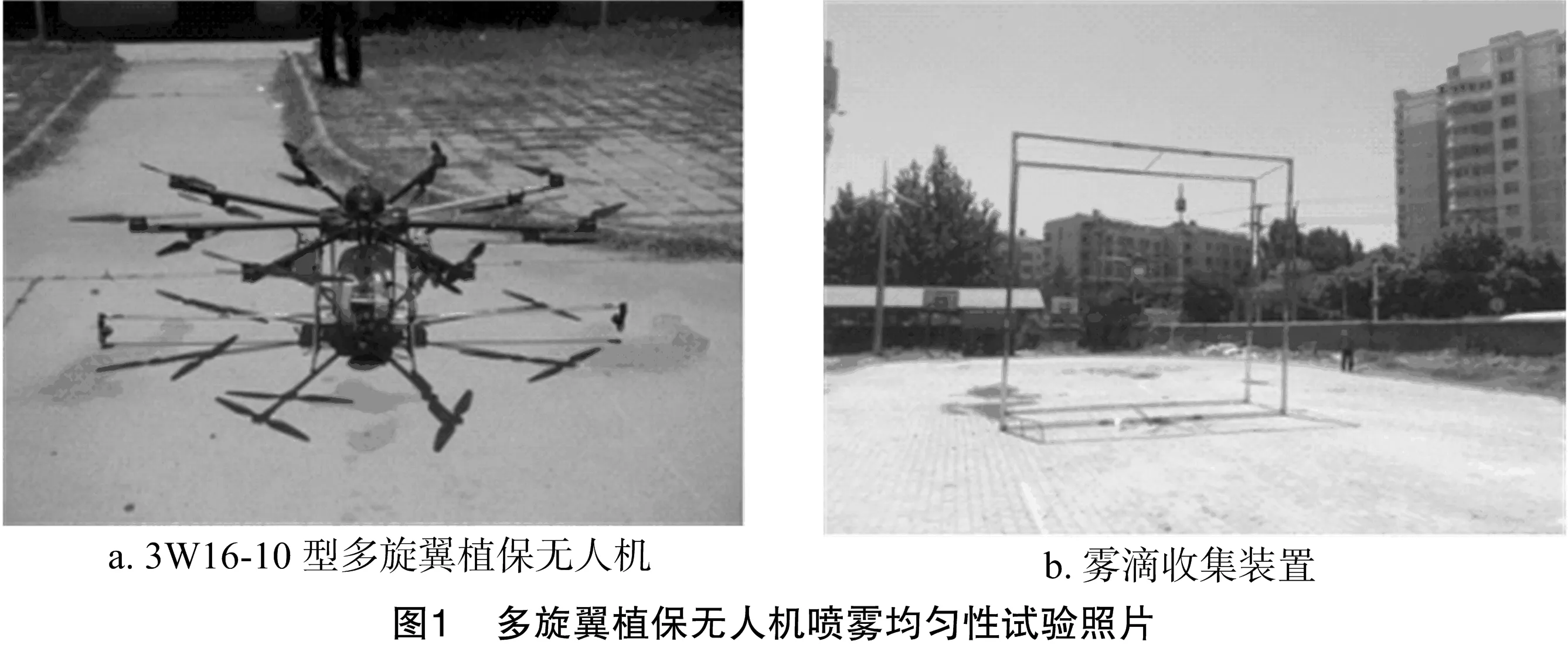
为保证试验结果的可靠性,在试验过程中对环境及试验参数等进行监测,所用仪器如图2所示,通过温湿度仪(广东省深圳市华盛昌机械科技实业股份有限公司)、风速仪(浙江省杭州绿博仪器有限公司)监测环境温度、风速、湿度等。通过无人机自带的图传设备实时记录无人机的飞行速度、高度。数据采集及配套分析装置包括数据采集卡、密封袋、移液枪、紫外可见分光光度计(图2-c)等,配制质量浓度为2 g/L的胭脂红溶液(天津市科密欧化学试剂有限公司)作为喷雾液。测试后将雾滴收集器的胭脂红溶液用去离子水洗脱后,经EXPEC分光分析仪[聚光科技(杭州)股份有限公司]检测其吸光度。
1.2 试验方法
2017年4—5月在河南农业大学第三生活区实验楼前空白场地进行试验,测试按照无人植保机械施药空间质量平衡测试方法实施[1]。试验桩装置如图1-b所示,定性滤纸用夹子固定在收集装置2个侧面的36个点上,分为3组;在底面上用夹子将定性滤纸固定在27个点上,分3组。同时用培养皿在地面上设置3组,27个点作为参照。本试验采用响应面分析的试验方法设计试验,选取高度、速度、喷雾压力3个自变量设置试验范围中低值和中高值为1.2~2.0 m、1.2~4.0 m/s、0.3~0.5 MPa,试验分析目标为沉积浓度变异系数。对环境温度、风速进行监测,达到试验所需水平时进行试验,用2 g/L胭脂红溶液代替药液喷雾,启动植保无人机使其进入正常飞行运行状态,每组试验重复3次。每组试验结束后待雾滴采集卡自然晾干,编号并装入收集盒。
1.3 数据处理
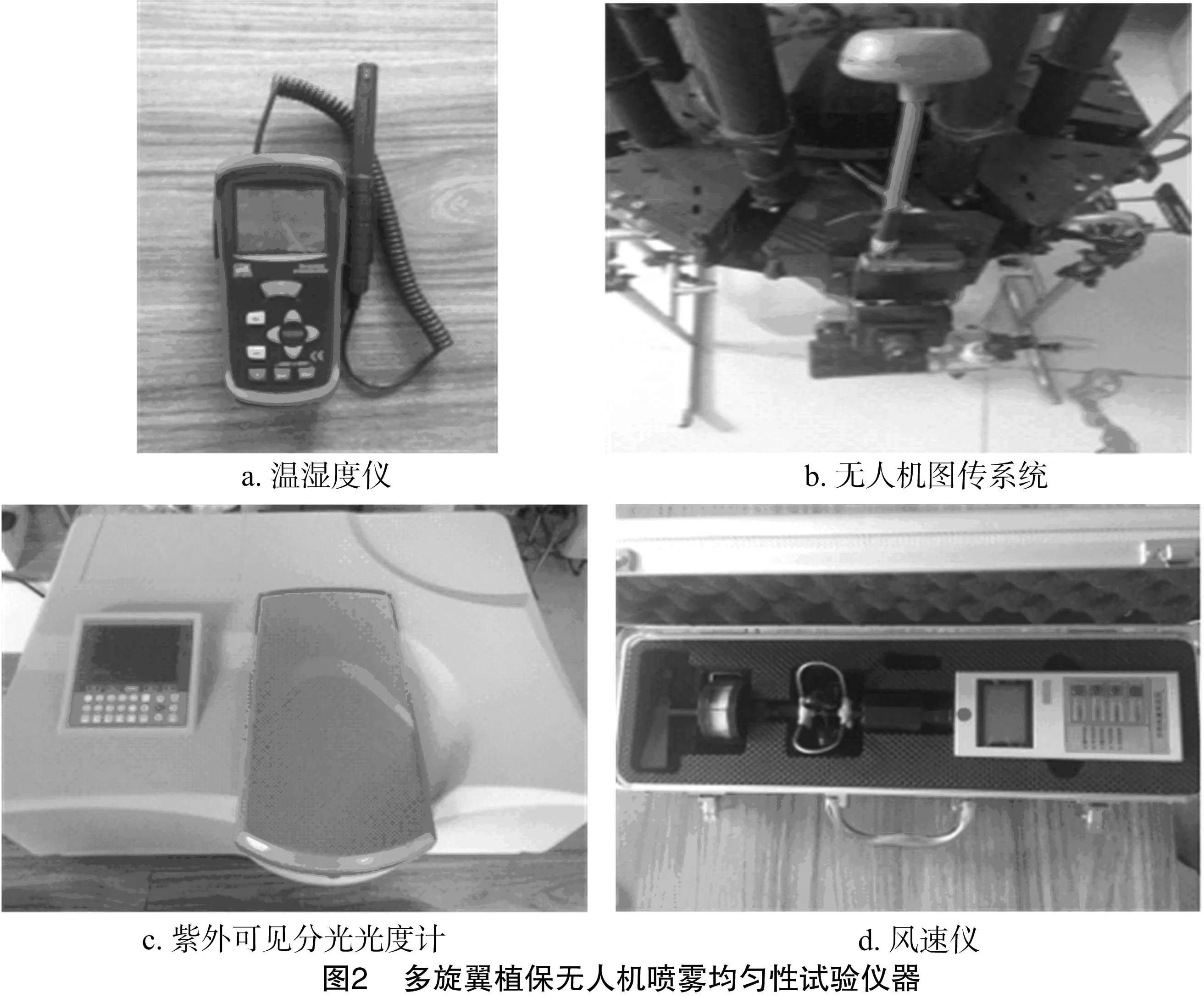
1.3.1 沉积浓度吸光度标定 先使用分析天平称取0.5 g分析纯级胭脂红粉末,放入烧杯中用玻璃棒搅拌,待粉末状物质完全消失,加入到500 mL的容量瓶中,配制2 g/L胭脂红原液,用移液枪分别抽取100、200、300、400、500、600、700、800、900、1 000 μL的胭脂红原液加入10 mL的容量瓶中,配制10、20、30、40、50、60、70、80、90、100 mg/L 10组胭脂红溶液,选取超纯水作为参照组,在其最大波长λ=508 nm处测得其最大吸光度,每份重复测试3次并取其平均值,得到胭脂红溶液浓度吸光度曲线(图3)。通过线性回归拟合,其决定系数r2=0.992。由于沉积量的测量须要测试稀释液浓度,胭脂红溶液浓度与吸光度的关系式:
C=0.036 1D-0.160 4。
式中:D为吸光度;C为胭脂红溶液浓度,mg/L。
1.3.2 雾滴沉积浓度的测定及统计方法
1.3.2.1 胭脂红回收率的检测 用移液枪分别吸取10种浓度的胭脂红溶液200 μL滴至培养皿中,待其自然风干后吸取200 μL超纯水反复洗涤培养皿,并再次测量洗涤液吸光度,经试验检测,胭脂红溶液回收率可达93.5%,且不受浓度高低影响。
1.3.2.2 单点雾滴收集皿沉积浓度的测量 单点雾滴收集皿沉积浓度的测量方法:喷雾试验结束后,待其自然风干,加盖,带回实验室用200 μL超纯水反复洗涤,选取超纯水作为参照组测量其吸光度。沉积浓度公式为
式中:βdep是雾滴采集卡上单位面积雾滴沉积量,mg/cm2;βsmpl是可见紫外分光光度计示数;βblk为空白采集卡读数;Fcal为可见紫外分光光度计示数与示踪剂浓度的关系系数,μg/L;Vdil为加入洗涤液的体积,mL;βspray为药液中示踪剂浓度;Acol为收集卡面积。
水利施工现场由于具备显著的复杂性,因此亟待对此予以综合性的施工管理。通过推行现场施工监管的举措,应当能在根源上消除某些潜在隐患或者其他施工风险,确保水利建筑物应有的安全性并且杜绝某些额外的水利建设成本耗费。由此可见,施工现场管理举措应当能够渗透在全过程的水利施工中,其中包含了如下的施工现场管理关键技术:
采用变异系数CV作为衡量其喷雾均匀性的标准,其公式为

2 试验结果与分析
2.1 单因素试验结果
2.1.1 植保无人机高度对雾滴沉积均匀性的影响 从图4可以看出,当高度≤1.5 m时,随着高度的增大,植保无人机喷雾沉积浓度的变异系数减小;当高度>1.5 m时,多旋翼植保无人机喷雾沉积浓度的变异系数随着高度的增大而增大。可见,在喷雾作业过程中,在一定范围内飞行高度与喷雾均匀性成正比,但是超过一定高度后喷雾高度对喷雾沉积均匀性又会产生负面影响,因此沉积均匀性最好的试验高度为 1.5 m。

2.1.2 植保无人机相对速度对雾滴沉积均匀性的影响 从图5可以看出,3W16-10型多旋翼植保无人机雾滴沉积均匀性变异系数随速度变化并无明显改变,说明飞行速度对其雾滴沉积均匀性影响不明显。

2.1.3 植保无人机喷雾压力对雾滴沉积均匀性的影响 从图6可以看出,3W16-10型多旋翼植保无人机雾滴沉积浓度变异系数随喷雾压力的增加小范围减少,雾滴均匀性变好。
2.1.4 响应面试验结果及方差分析 根据单因素试验结果,选取处理高度(A)、速度(B)、压力(C)3个重要因素,并用Design Expert 7.0软件设计3因素3水平试验。以沉积浓度变异系数为目标函数,响应面试验结果见表2。
2.2 试验分析
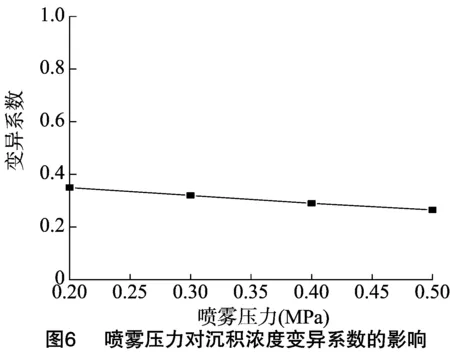

表2 响应面试验及响应值
从表3可知,试验数据所得的F值为9.230,P值为0.000 9,表明该模型显著。基于回归模型的因素显著性分析,在显著水平0.01条件下,模型中的一次项A、二次项A2表现显著,其余项表现为不显著。在显著水平0.05条件下,模型中的一次项A、C,二次项、A2、B2显著,其余项表现为不显著。整个模型的失拟项P=0.127 9>0.05,表明失拟项不显著,即该模型是稳定的,能较好地预测高度、速度、压力3个因素对植保无人机喷雾均匀性的影响,因此可采用此模型对高度的变化量进行分析和预测。由模型中一次项的回归系数绝对值可得对沉积浓度变异系数高低影响的顺序为:飞行高度>飞行速度。以飞行高度、飞行速度的编码值为自变量,以沉积浓度变异系数为y值的二元二次回归方程为
由此可得最佳的预作业条件为:飞行高度1.39 m,飞行速度2.38 m/s,喷雾压力0.5 MPa,此条件下的沉积浓度变异系数为0.172。
2.3 试验因素交互影响分析
为了得到两两因素之间同时作用对沉积均匀性变异系数的影响,用Design Expert 8.0软件作出相应的响应曲面3D图和相应的等高线图(图7、图8、图9),并对两两因素间的交互作用进行分析。
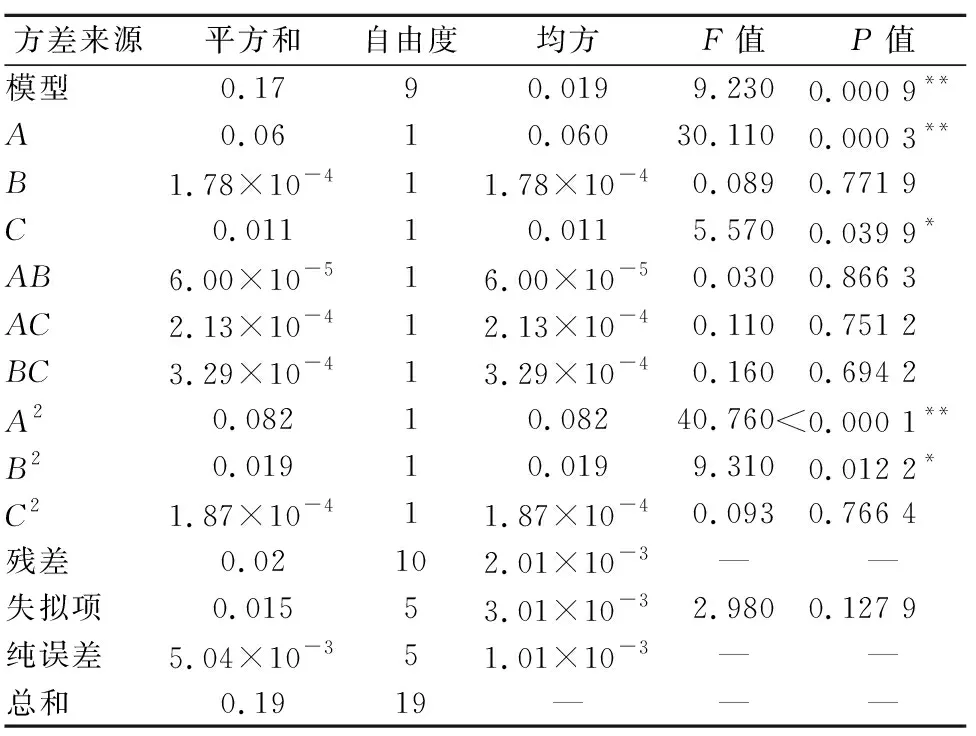
表3 响应曲面方差分析
图7是喷雾压力为0.4 MPa时,3W16-10型多旋翼植保无人机飞行速度和飞行高度对雾滴沉积均匀性变异系数的影响曲面图。当飞行速度一定时,随着飞行高度的增加,雾滴沉积均匀性变异系数先小范围减小后快速增加,这是由于在飞行高度过低时,雾滴来不及雾化就直接喷洒到采集卡上,当高度过高时,漂移量增加,雾滴受下旋风涡流影响会出现局部集中的情况;当飞行高度一定时,雾滴沉积均匀性变异系数随速度变化不太明显,这是由于速度对雾滴沉积均匀性影响效果不显著;整体来看,飞行速度和飞行高度互作对3W16-10型多旋翼植保无人机喷雾沉积的均匀性影响不显著。

图8是飞行速度为2.6 m/s时,3W16-10型多旋翼植保无人机喷雾压力和飞行高度对雾滴沉积均匀性变异系数的影响曲面图。当喷雾压力一定时,随着飞行高度的增加,雾滴沉积均匀性变异系数先小范围降低后快速增加,对雾滴沉积均匀性变异系数影响极显著;当飞行高度一定时,雾滴沉积均匀性变异系数随喷雾压力增加小幅度减少,这是由于当喷雾压力增加时,雾化效果较好,有利于雾滴更加均匀地到达靶标采集卡上;整体来看,喷雾压力和飞行高度互作对3W16-10型多旋翼植保无人机喷雾沉积的均匀性影响不显著,在高度为1.39 m、喷雾压力为0.5 MPa时,沉积浓度变异系数最低,均匀性最好。
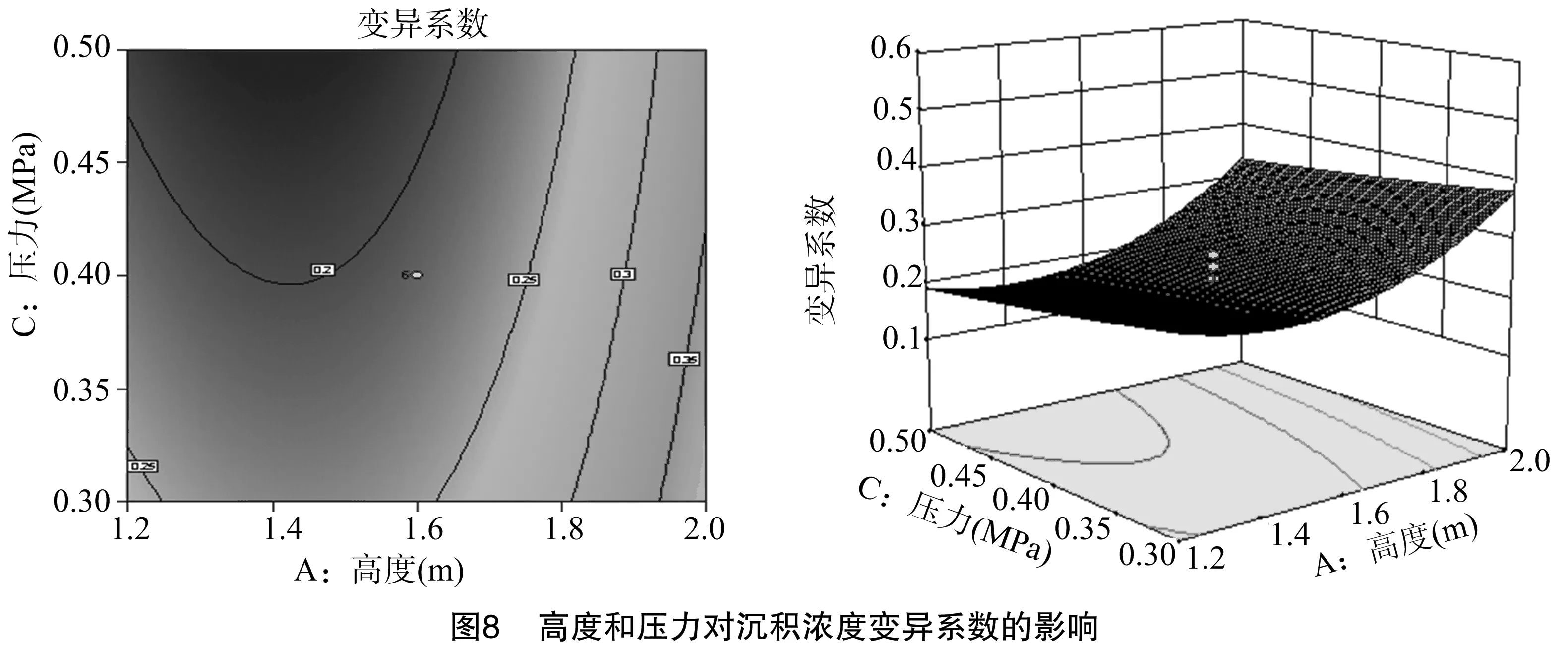
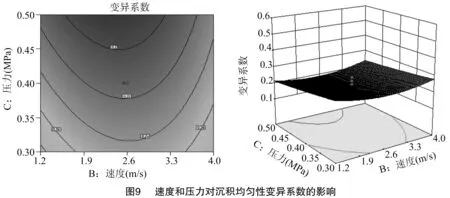
图9为飞行高度为1.6 m时,3W16-10型多旋翼植保无人机喷雾压力和飞行速度对雾滴沉积均匀性变异系数的影响曲面图。当飞行速度一定时,随着喷雾压力的增加,雾滴沉积均匀性变异系数小幅增加,对雾滴沉积均匀性变异系数影响显著;当喷雾压力一定时,雾滴沉积均匀性变异系数随飞行速度增加变化较小,响应面起伏较小,颜色波动小,说明喷雾压力和飞行速度互作对雾滴沉积均匀性的交互作用不明显。
3 结论
根据以上分析,通过Design Expert 8.0软件模拟所得3W16-10型多旋翼植保无人机最佳作业参数为:飞行高度1.39 m,飞行速度2.38 m/s,喷雾压力0.5 MPa。通过修正,将飞行高度设置为1.4 m, 飞行速度设置为2.5 m/s,喷雾压力设置为0.5 MP,在此条件下进行3W16-10型多旋翼植保无人机喷雾均匀性测定试验。在修正条件下所得雾滴沉积均匀性变异系数为0.184,与预测值间相对误差为8%。结果表明,运用响应曲面法优化3W16-10型多旋翼植保无人机作业参数是可行的。
通过单因素试验和响应曲面法优化3W16-10型多旋翼植保无人机喷雾均匀性试验得到的最佳作业参数为:飞行高度1.39 m,飞行速度2.38 m/s,喷雾压力0.5 MPa,此时沉积均匀性变异系数为0.172,相对误差为8%。
猜你喜欢
热带作物学报(2021年1期)2021-02-22
小小说月刊(2019年4期)2019-04-18
科技信息·中旬刊(2018年9期)2018-10-21
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07
火花(2015年1期)2015-02-27
装备学院学报(2015年6期)2015-01-10
理科考试研究·高中(2014年9期)2014-09-22
食品与发酵工业(2011年3期)2011-04-14
青年文摘·上半月(1983年5期)1983-01-01