
吸气式高超声速飞行器冷态测力试验支撑校正
2018-02-13 07:54王晓朋张陈安刘春风王发民叶正寅
实验流体力学 2018年6期
王晓朋, 张陈安, 刘春风, 王发民, 叶正寅
(1. 西北工业大学 翼型、叶栅空气动力学国防科技重点实验室, 西安 710072; 2. 中国科学院力学研究所 高温气体动力学国家重点实验室, 北京 100190; 3. 中国航天空气动力技术研究院, 北京 100074)
0 引 言
吸气式高超声速飞行器已经成为高超声速领域重要发展方向之一,被美国视为未来实现“全球到达,全球作战”快速反应能力的重要手段[1-3]。机体和推进系统高度集成、内外流耦合严重是吸气式高超声速飞行器的显著特点[4-5]。对此类飞行器而言,地面冷流试验是检验其气动特性的重要手段[3,6]。
美国以X-43A吸气式高超声速飞行器为研究对象,进行了大量冷/热态气动力试验,积累了丰富的数据,建立了相应的气动力特性数据库[7-9]。近年来,国内学者针对吸气式高超声速飞行器也开展了大量地面冷流气动力试验研究,推动了我国高超声速飞行器研究的实用化进程。张红英[10]、范晓樯[11]以及金亮[12]等以吸气式高超声速飞行器为研究对象,开展了相关的冷通气风洞试验,对该类飞行器的气动特性进行了研究,文献[13]对此进行了初步总结。但需要注意的是,对吸气式高超声速飞行器这种带有内流道的一体化飞行器而言,在采用传统支撑方式进行整机测力试验时,支撑机构不可避免地会对测量结果造成影响[14-15]。因此,有必要开展吸气式高超声速飞行器冷流测力试验支撑干扰研究,分析不同支撑方式对试验结果的影响并针对性地加以改善。
本文以基于乘波前体的机体/冲压发动机一体化飞行器作为研究对象,对尾支撑、背支撑以及背支撑+虚拟支撑等3种风洞支撑机构的气动干扰特性进行风洞试验和数值仿真研究,并通过对比背支撑和背支撑+虚拟尾支撑的方式对尾支撑测量结果进行校正。
1 实验研究
1.1 实验模型设计
在来流马赫数Ma=6、迎角α=0°、飞行高度H=25km的设计条件下,采用变角度楔/椭圆锥乘波体构型方法生成一体化飞行器前体[16];对前体楔锥型面进行优化设计,得到3个预压缩面,压缩角分别为8.5°、12°和17°;发动机简化为一个截面积几乎不变的内通道;后体部分参考乘波体前体,后掠角为6°,采用固定后掠角乘波体生成方法,得到乘波体后部布局;尾喷管膨胀面则采用特征线法进行设计。
飞行器机身总长L,总宽0.410L,前体长0.382L(第一、二、三级压缩面分别长0.186L、0.076L和0.120L),发动机长0.376L。在距离飞行器头部0.710L的位置安装垂直舵面和水平舵面,后掠角分别为21.5°和24.7°。为满足防热需要,对乘波体前缘进行钝化,钝化半径为10mm。图1为乘波一体化飞行器总体气动布局方案。
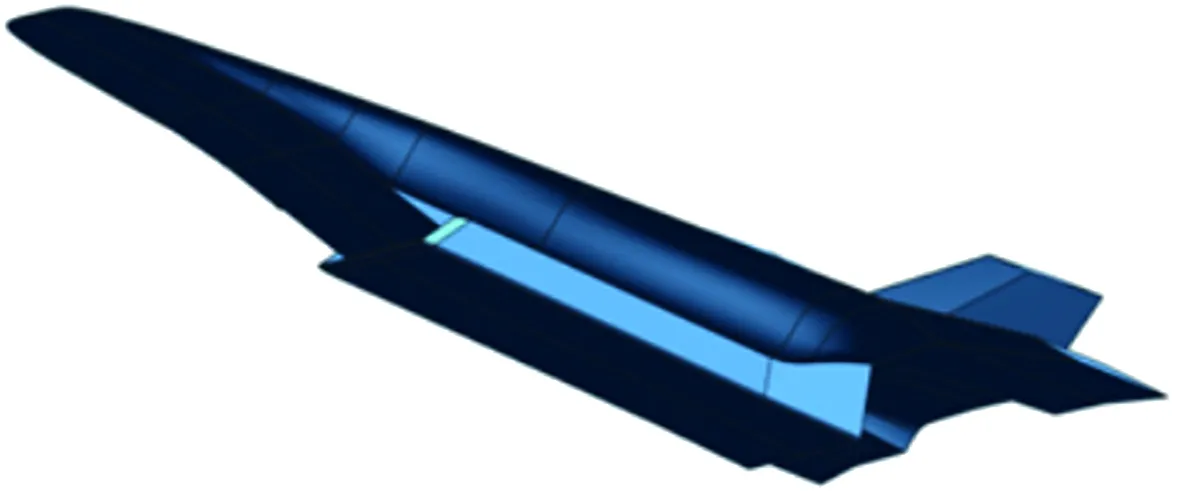
图1 一体化飞行器气动布局方案
实验模型采用超硬铝材料制成,如图2所示。缩比后总长500mm,体轴坐标系原点取在飞行器质心处,质心系数Xcg=0.62、Ycg=0。模型参考面积Sr=0.0062m2。

图2 模型实物图
1.2 实验方案
风洞试验采用3种支撑方式进行:(1) 尾支撑;(2) 背支撑;(3) 背支撑+虚拟尾支撑。
背支撑和虚拟尾支撑支杆一起使用,此时虚拟支杆用于模拟尾支撑支杆,但不和模型发生直接接触,如图3所示;对于单独的背支撑,则拆掉图中所示的虚拟尾支撑,单独使用背支撑开展实验。图4给出了两种支撑方式的连接方式。

图3 背支撑+虚拟尾支撑实物图
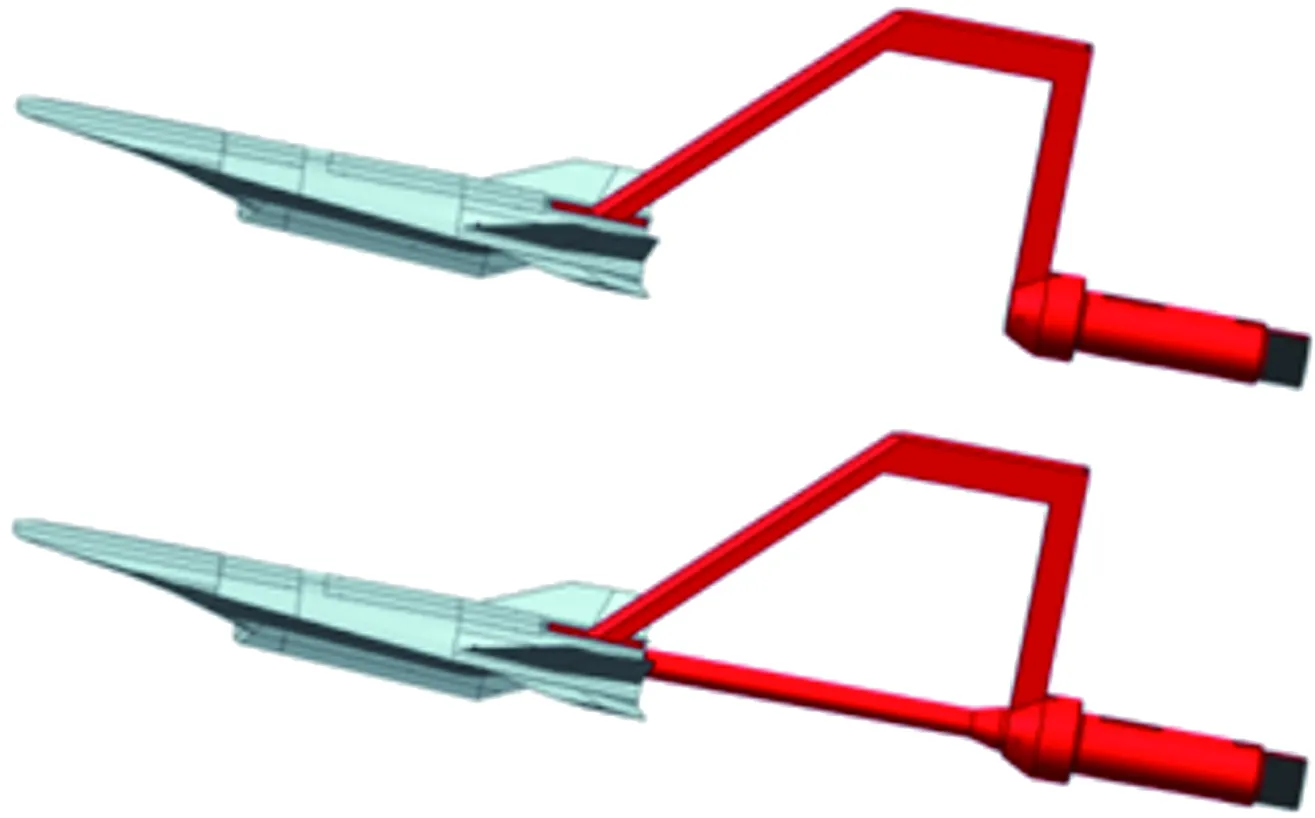
图4 背支撑/背支撑+虚拟支撑与模型的连接
模型真实气动力数据通过校正准则得到:
FCorrection=FSting-(FBlade+dummy sting-FBlade)
(1)
式中,FCorrection为校正后的气动力和力矩系数,FSting为尾支撑测量结果,FBlade+dummy sting为背支撑+虚拟尾支撑测量结果,FBlade为背支撑测量结果。
1.3 实验设备
实验在中国航天空气动力技术研究院FD-07高超声速风洞中完成。该风洞是一座自由射流暂冲式高超声速风洞。Ma=4时喷管出口直径为0.4m,其余马赫数下均为0.5m。实验马赫数Ma=4、6,迎角α为-2°、0°、2°、4°、6°和8°。具体来流条件和参数如表1所示。

表1 实验条件Table 1 Flow conditions
1.4 实验结果与分析
在3种不同支撑方式下对一体化飞行器主要气动特性参数进行了测量,以式(1)对尾支撑实验结果进行校正,结果如图5~8所示。通过对比各气动力系数随迎角的变化曲线,可以发现:
(1) 在3种支撑方式下,升力系数、阻力系数和俯仰力矩系数都随迎角增加而增大。升力系数呈线性分布;阻力系数具有一定曲率,近似呈抛物线分布,当α=-2°~2°时阻力系数变化较小,当α>2°时,阻力系数增加较快,这是因为迎角越大波阻也越大,波阻在总阻力中所占比例增加很快;俯仰力矩系数随迎角增大而增大,近似呈抛物线分布;随着马赫数增大,模型的升力系数、阻力系数和俯仰力矩系数逐渐减小,符合物理规律。从以上结果来看,支撑结构并未改变模型整体的力和力矩特性,表明头激波后的高压流体对气动力的贡献仍占主导作用。

图5 升力系数随迎角变化曲线
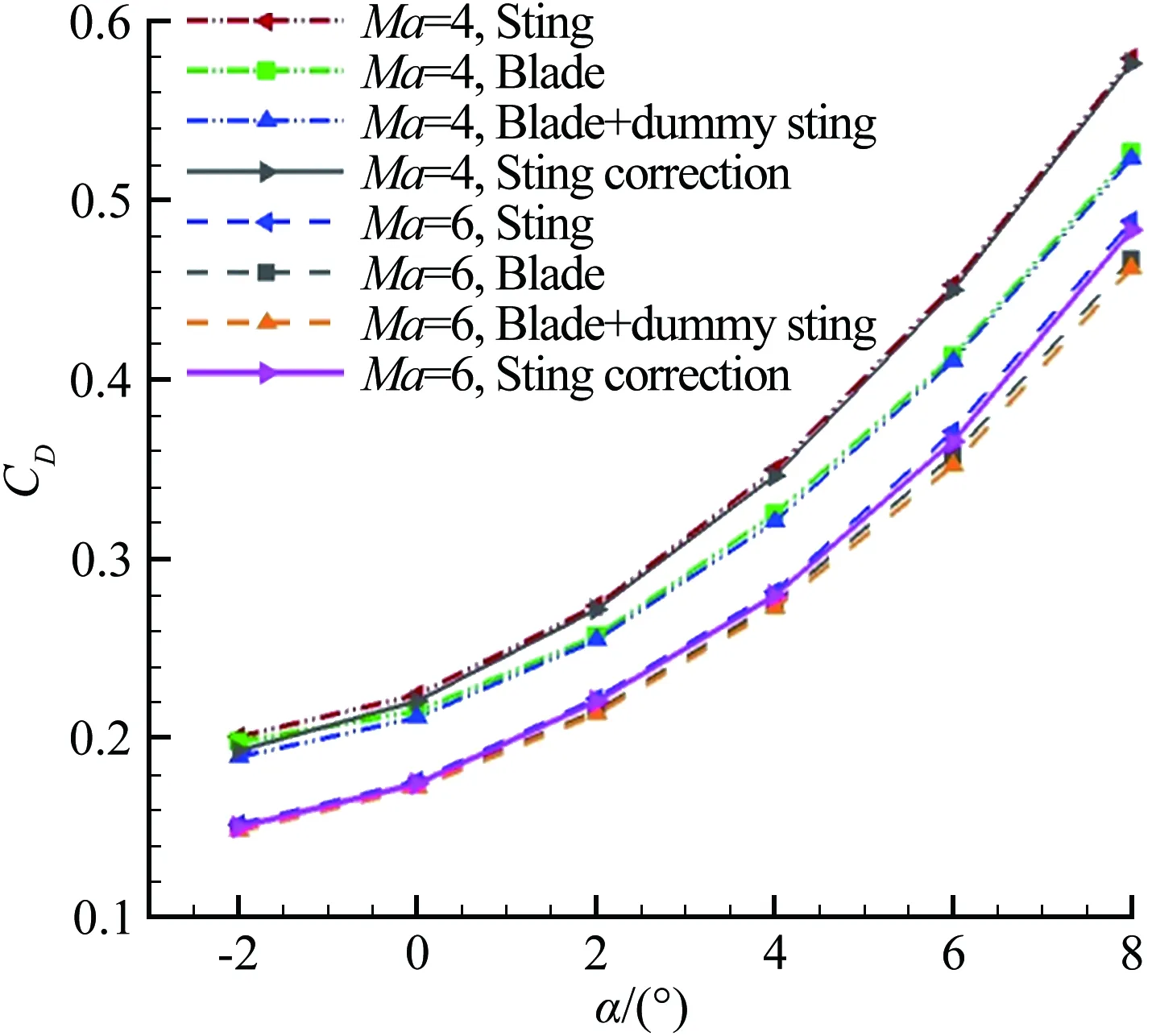
图6 阻力系数随迎角变化曲线

图7 升阻比随迎角变化曲线
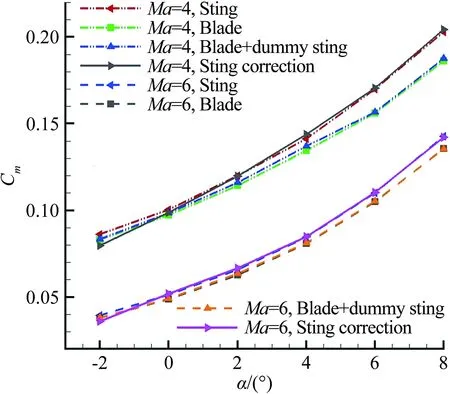
图8 俯仰力矩系数随迎角变化曲线
(2) 背支撑与背支撑+虚拟尾支撑测量结果差异不大,初步表明尾支撑对气动力的干扰量较小;而尾支撑与背支撑两者之间差异明显。
(3) 定义支撑结构的干扰量为:
η1=|(FCorrection-FSupported)/FCorrection|
其中FSupported表示带有支撑结构时的测量结果,FCorrection表示以式(1)对尾支撑测量结果校正后的数据。通过计算得到:
a. 在Ma=4时,尾支撑对升力系数、阻力系数、升阻比、俯仰力矩系数的最大干扰量分别为1.75%、3.80%、3.28%和1.86%;Ma=6时,则分别为0.87%、1.42%、0.95%和1.14%。
b. 在Ma=4时,背支撑对升力系数、阻力系数、升阻比、俯仰力矩系数的最大干扰量分别为18.15%、9.62%、18.74%和7.84%;Ma=6时,则分别为14.35%、5.23%、12.86%和5.17%。
总体来看,尾支撑对模型的气动干扰是一个小量,对气动力系数的影响最大不超过4%(对阻力系数和俯仰力矩系数的影响最为明显)。分析认为,其原因在于尾支撑仅会对模型底部和尾喷管后部的压力分布产生影响,且影响范围有限。而背支撑带来的气动干扰则显著得多,这是因为背支撑直接破坏了模型上表面的压力分布,直接对模型升力和波阻产生明显影响。
2 数值计算
为验证前述结论,对飞行器模型在风洞测试条件下的定常流场进行数值分析。采用格心格式的有限体积法求解Navier-Stokes方程,空间离散采用二阶TVD格式,时间离散采用隐式LU-SGS方法,湍流模型则采用SST模型。计算模型为半模,网格为非结构网格,网格总数约300万,近壁面网格单元y+值小于10。图9给出了壁面网格和对称面网格分布情况。
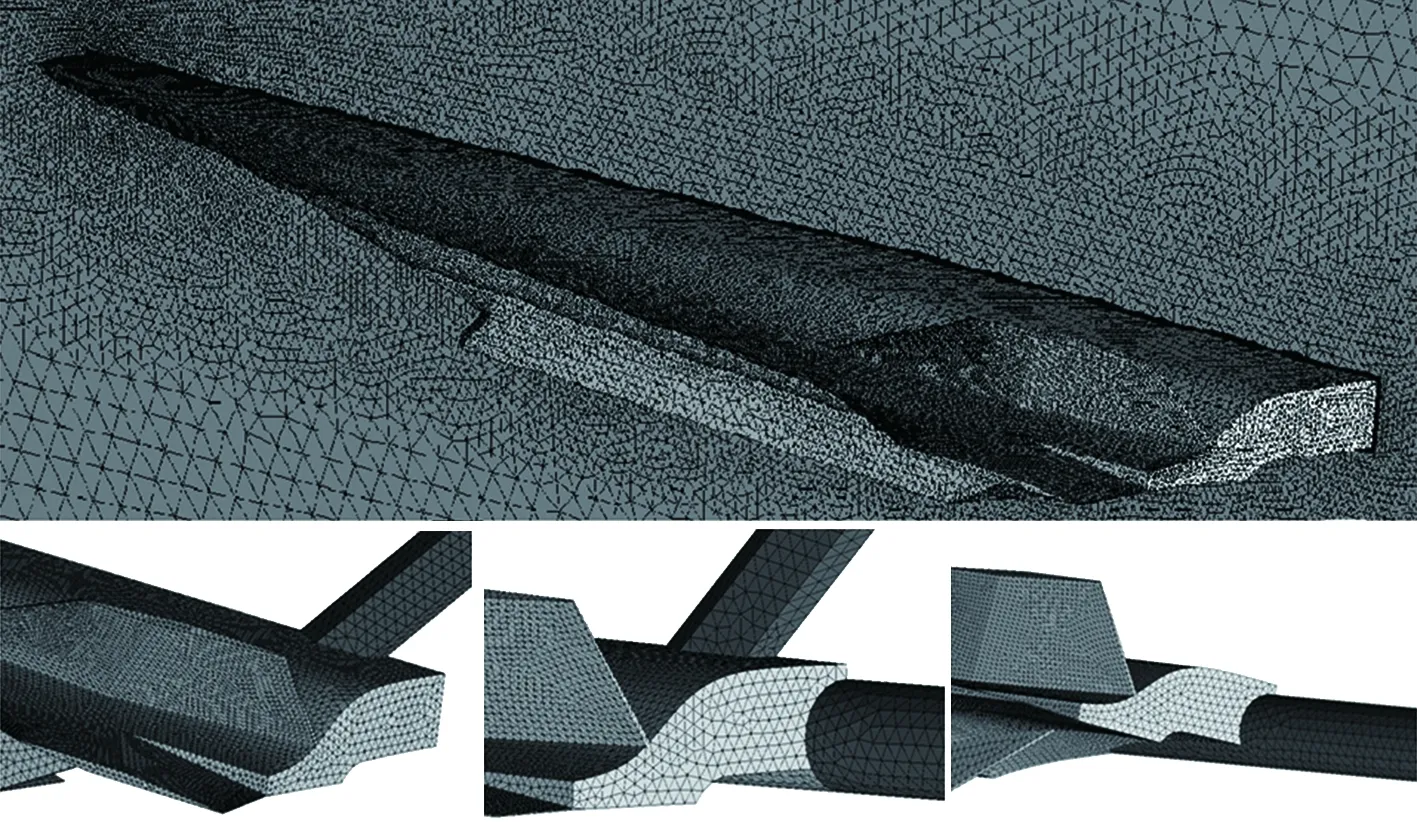
图9 壁面网格和对称面网格分布情况
图10~11给出了模型风洞实验的纹影照片以及对应的数值模拟结果。可以看出,数值计算得到的波系与实验纹影基本一致。
气动力系数的计算结果如图12~19所示,升力系数、阻力系数、升阻比以及俯仰力矩系数与实验结果的最大误差均不超过8%,在误差允许范围之内,说明本文计算方法合理、结果准确。
定义支撑结构的干扰量为:
η2=|(FUnsupported-FSupported)/FUnsupported|
其中,FUnsupported表示无支撑时的计算结果,FSupported表示带有支撑时的计算结果。计算可得:

图10 尾支撑+虚拟支撑试验流场与计算流场对比(Ma=4,α=0°)
Fig.10ComparisonofflowfieldsobtainedbyexperimentandCFDwhenMa=4,α=0°

图11 尾支撑试验流场与计算流场对比(Ma=6,α=0°)
Fig.11ComparisonofflowfieldsobtainedbyexperimentandCFDwhenMa=6,α=0°
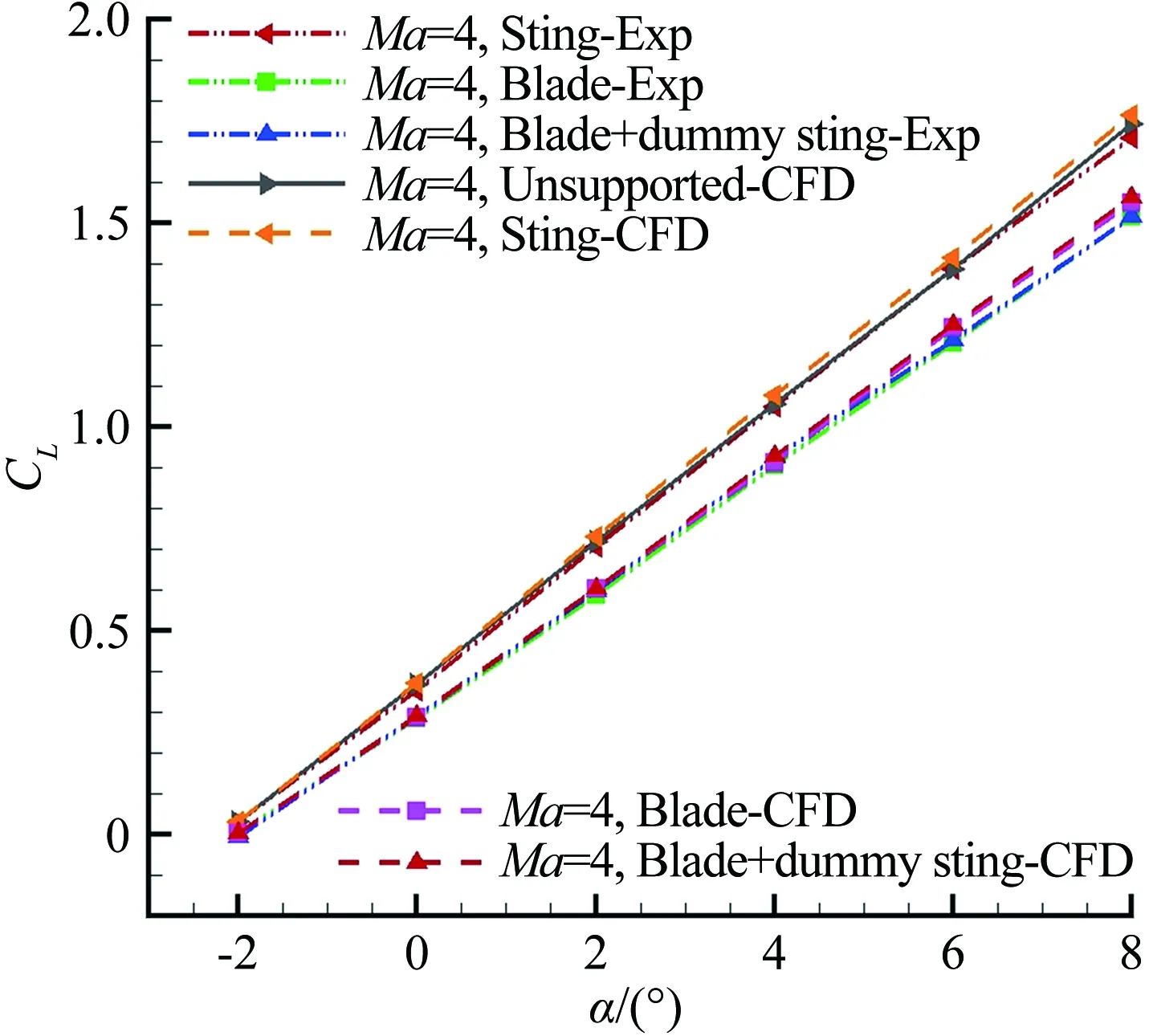
图12 Ma=4时升力系数随迎角变化曲线
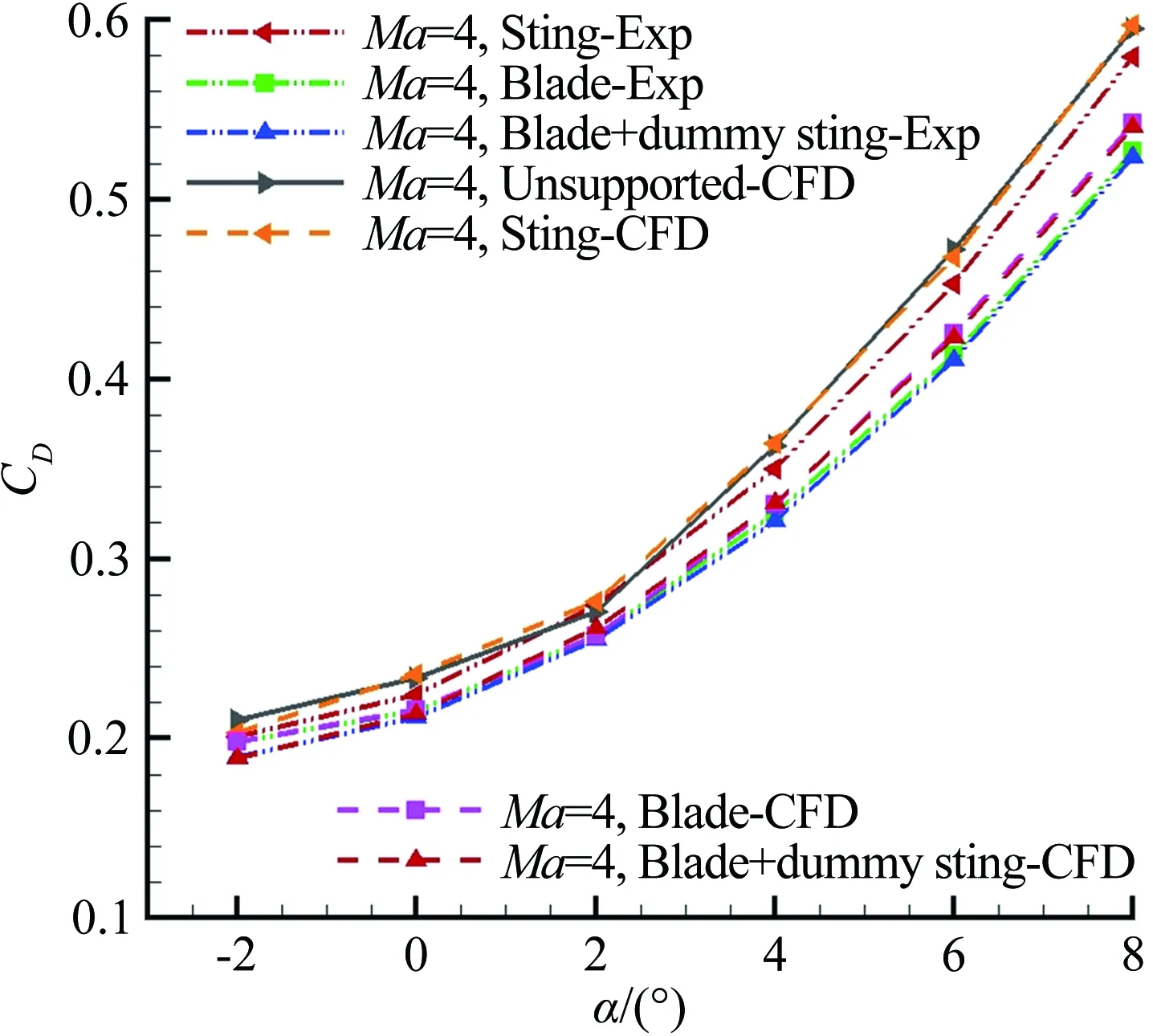
图13 Ma=4时阻力系数随迎角变化曲线
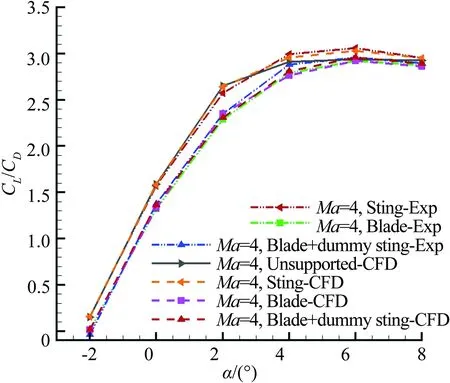
图14 Ma=4时升阻比系数随迎角变化曲线
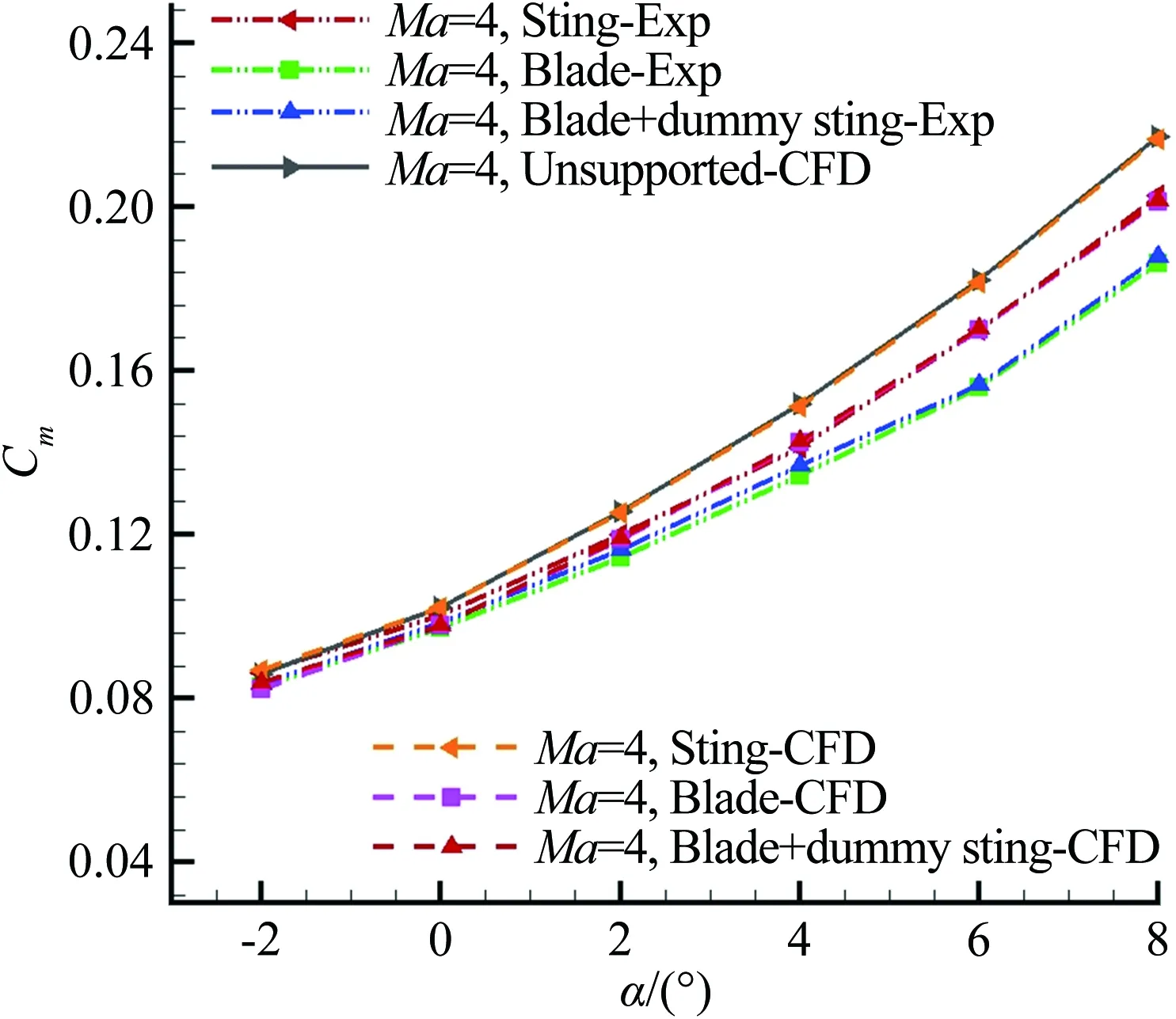
图15 Ma=4时俯仰力矩系数随迎角变化曲线

图16 Ma=6时升力系数随迎角变化曲线
(1)Ma=4时,尾支撑对升力系数、阻力系数、升阻比、俯仰力矩系数的最大干扰量分别为1.97%、3.62%、3.00%和1.16%;Ma=6时,则分别为2.65%、3.65%、5.74%和2.75%。
(2)Ma=4时,背支撑对升力系数、阻力系数、升阻比、俯仰力矩系数的最大干扰量分别为22.38%、9.92%、15.85%和7.34%;Ma=6时,则分别为15.88%、7.26%、17.68%和7.90%。

图17 Ma=6时阻力系数随迎角变化曲线
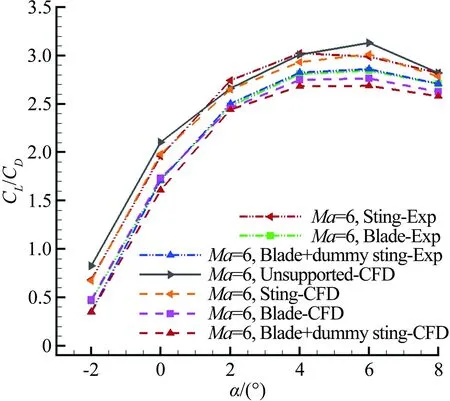
图18 Ma=6时升阻比系数随迎角变化曲线
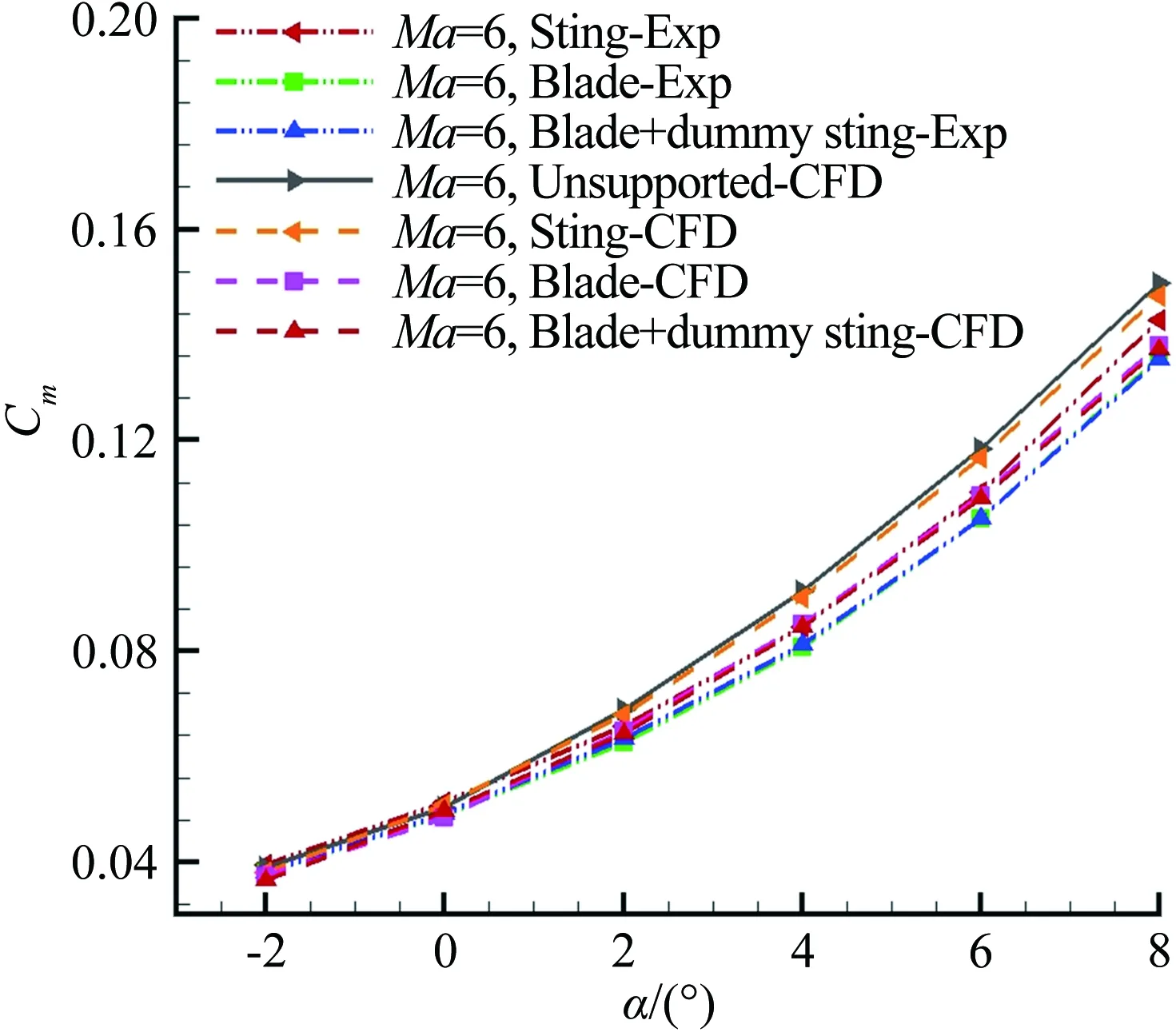
图19 Ma=6时俯仰力矩系数随迎角变化曲线
从计算结果看,尾支撑对气动力系数影响较小,而背支撑的影响更为显著,此结论与实验结果一致,验证了实验分析结果。图20、21是单独尾支撑和单独背支撑与无支撑时模型表面的压力分布对比。可以看出,尾支撑对模型表面压力分布影响范围较小,且因其恰好处于尾喷管末端低压区,在该区域引起的压力变化也不大;而背支撑对模型上表面的影响则明显得多,不仅影响范围更大,而且导致的压力变化也更为明显。
Fig.20ComparisonofpressuredistributionsonthelowersurfaceofthemodelwithrearstingandunsupportedwhenMa=4,α=0°
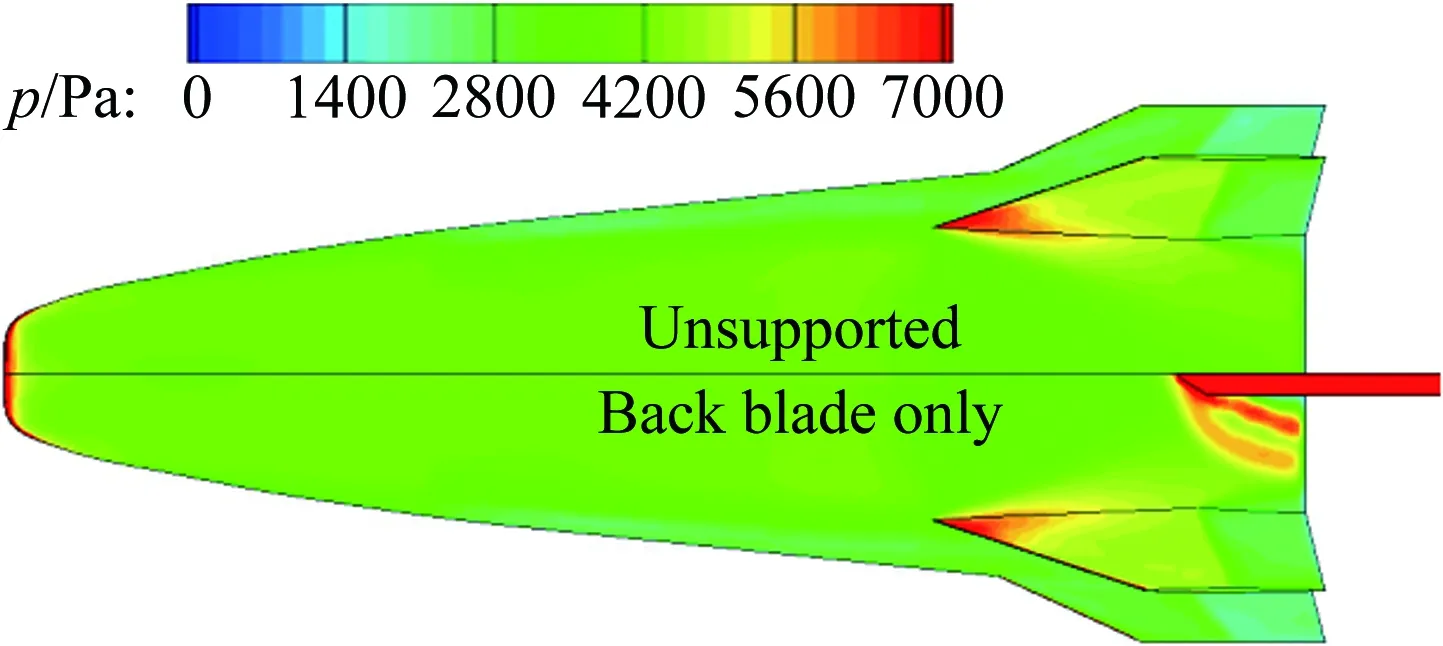
图21 Ma=4,α=0°时背支撑和无支撑时模型上表面压力分布对比
Fig.21ComparisonofpressuredistributionsontheuppersurfaceofthemodelwithbackbladeandunsupportedwhenMa=4,α=0°
为验证本文校正方法的准确性,采用式(1)准则校正尾支撑计算结果,并与无尾支撑时的计算结果进行比较,如图22~25所示。可以看出,校正后的结果与无支撑时的计算结果基本一致。Ma=4时,两者的升力系数、阻力系数、升阻比和俯仰力矩系数的最大误差分别为1.92%、1.69%、2.00%和0.53%;Ma=6时,则分别为1.41%、0.68%、1.35%和1.30%。
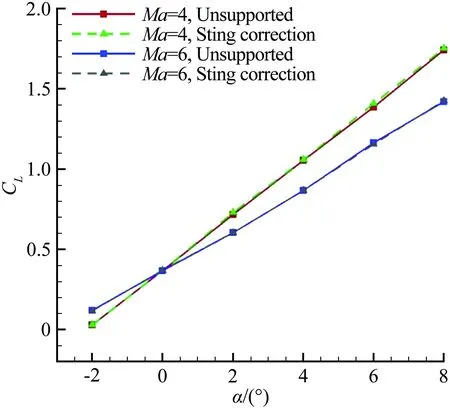
图22 升力系数随迎角变化曲线
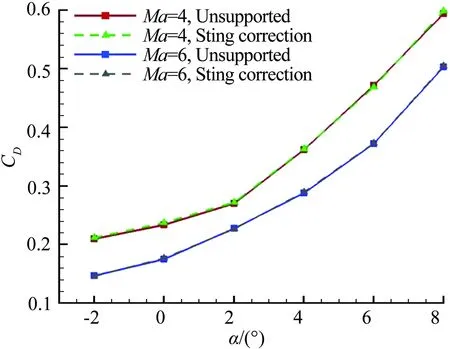
图23 阻力系数随迎角变化曲线

图24 升阻比随迎角变化曲线
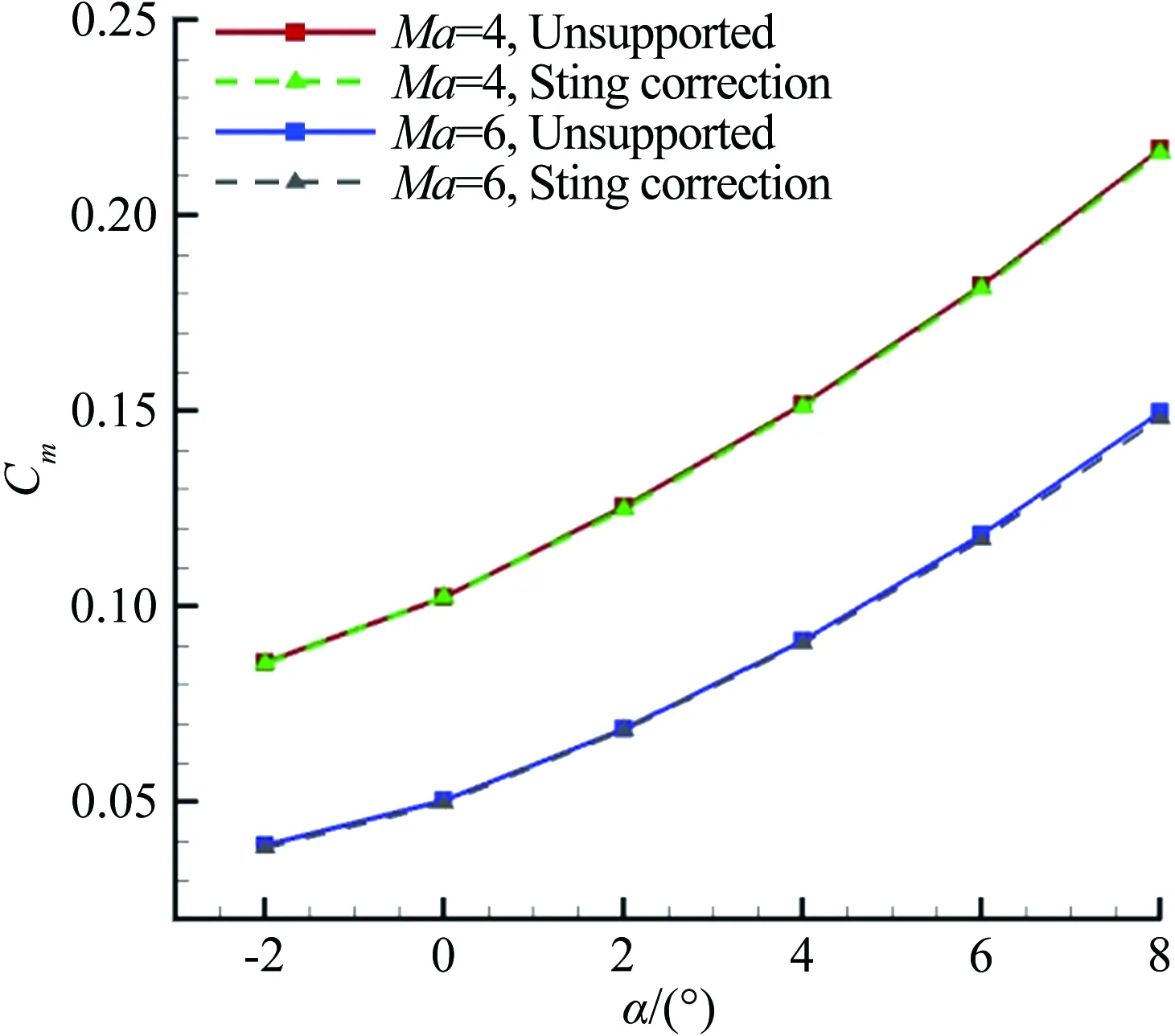
图25 俯仰力矩系数随迎角变化曲线
从计算结果看,本文校正方法能有效消除尾支撑带来的气动干扰,可以准确预测模型气动力。
3 结 论
在冷流状态下,采用实验和数值仿真方法对机体/发动机一体化飞行器风洞测力试验的气动干扰问题进行了分析。结果表明:
(1) 相对于背支撑,尾支撑对飞行器模型表面的影响范围有限,且引起的模型表面压力变化较小,因此其导致的干扰量较小,更适合作为一体化飞行器测力实验的支撑机构;
(2) 结合背支撑和背支撑+虚拟尾支撑的方式,能够有效地对尾支撑干扰量进行校正,为实验提供更为精确的气动力数据。
本文仅对支撑机构的气动干扰问题进行了初步研究,未来将对尾支杆的具体参数开展更多研究工作,以获得更多可供参考的试验数据。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
应用数学和力学(2022年1期)2022-02-18
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
科技视界(2021年7期)2021-04-13
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
空气动力学学报(2019年2期)2019-05-08
太空探索(2016年7期)2016-07-10
