
某轨姿控管路系统模拟分析及优化
2018-02-09 06:54贺迪华罗卫东黄琳森刘忠
机械 2018年1期
贺迪华,罗卫东,2*,黄琳森,刘忠
某轨姿控管路系统模拟分析及优化
贺迪华1,罗卫东1,2*,黄琳森1,刘忠3
(1.贵州大学机械工程学院,贵州 贵阳 550025;2.贵州大学明德学院,贵州 贵阳 550025;3.贵州航天朝阳科技有限责任公司,贵州 遵义 563000)
根据某轨姿控系统中关键组件的固定位置进行管路布置,并通过ANSYS Workbench对管路和管路接头进行了仿真分析,针对分析结果、结合管路布置原则对原管路进行改进。通过与原管路对比发现:改进管路模型的固有频率避开了系统工作频率910 Hz;在随机振动中方向上的等效应力和位移分别减小了66.62 MPa和0.72878 mm且在、方向上的等效应力和位移增加幅度较小;四通管路接头使得管路中流量分配更加均匀且降低了将近10%的水击压力,有效地改善了轨姿控系统中管路的布置形式。
轨姿控管路系统;四通管路接头;管路模型;仿真分析
轨姿控管路系统是管子、管子连接件、阀门等连接成用于输送液体推进剂的装置,是典型的动力支撑和维持系统。管路系统的结构、布置形式以及工作品质直接影响到结构系统的正常工作[1]。管路系统设计和布置不合理导致工作系统失效的事故鲜有发生,严重的甚至造成管路破裂,给系统带来巨大的经济损失。因此,对轨姿控管路系统的优化改进和分析研究有着重要的意义。
目前,管路系统的研究存在诸多方面。文献[2]采用了一维有限元方法对管路中的液体瞬变流进行计算。文献[3-4]对液体火箭发动机系统的充填过程动态特性进行了研究。文献[5]采用有限差分格式的特征线方法,针对某姿控推进系统发动机真实氧化剂管路的关机瞬变特性进行了数值研究,结果发现喷注前的最大瞬变压力达到贮箱压力的三倍。文献[6]对液压管路流固耦合线性化动力学模型和非线性振动模型的研究成果进行分析,并对液压管路被动、主动及半主动振动控制的研究进展及研究成果进行评述,提出了管路系统流固耦合振动机理及振动控制研究的发展趋势。文献[7]针对船舶管路系统抗冲击性能仿真方法精度不足的问题,研究用于舰船管路系统的高精度抗冲击仿真方法。文献[8]针对原四通接头在工作过程中存在的缺陷,对四通接头进行改进设计,结果表明改进后的四通接头效果良好。
本文通过对四通接头和原管路布置形式进行了优化改进,将优化的四通接头运用到改进的管路中,最后对改进的管路模型进行模拟分析。
1 计算理论
1.1 湍流计算理论
标准-模型是目前应用范围最广的两方程湍流模型[9],其方程为:


其中:



1.2 模态分析理论
模态分析是最为基础的内容,也是动力学分析中必不可少的环节。工程中进行模态分析的主要目的在于找出系统的固有频率,从而避免可能引起的共振现象。
自由度系统自由振动的方程为[10]:

式中:[]、[]和[]分别为系统质量、阻尼和刚度矩阵。
因为式(3)为耦合方程,计算时需要对其进行解耦处理。解耦方式如下:
令:

即将式(3)变化为:

将质量、阻尼和刚度矩阵同时对角化,依据振型矩阵正交性关系,有:



将自由度系统自由振动方程解耦成模态坐标下个相互独立的自由振动方程组,第个方程为:

2 四通接头计算与分析
2.1 四通接头建模
运用绘图软件Creo对四通接头进行建模,如图1所示3种四通接头模型。图(a)为直通型流道空槽,图(b)为半径=13 mm的球形流道空槽,图(c)为半径=23 mm的球形流道空槽,接头壁厚均为2 mm,管路壁厚均为1 mm,管路内径为10 mm。
2.2 流域模型及边界条件
将三种四通接头导入ICEM CFD软件中抽取流域并划分网格,划分结果如图2所示。

图1 三种四通接头模型

图2 流域网格模型
根据轨姿控发动机实际工作要求,设置三个出口边界条件均为0.4 MPa;选用液体推进剂MMH作为工质,其密度为874.40 kg/m3,动力粘度为0.775×10-3Pa·s[11];计算3.0579 m/s、 6.1157 m/s、9.1736 m/s和12.2315 m/s四种工况下推进剂入口速度对三个出口质量流量分配的影响。
2.3 计算结果分析
图3为三种四通接头在入口速度6.1157 m/s下的速度矢量分布情况。

图3 四通接头速度矢量图
在直通流域中,Outlet1和Outlet3附近存在明显的涡流现象,入口速度增大时,涡流现象越加明显,对四通接头产生不利影响。在=13 mm球形流域中,避免了上述现象的发生,但由于流体惯性作用,使得Outlet2的出口速度依然显著高于Outlet1和Outlet3。在=23 mm球形流域中,由于球形容积较大,有效地减缓了流体进入球形域的这种惯性,因而使得各出口的速度基本相近。
通过对三种四通接头在不同入口速度下的仿真分析,绘制出各四通接头出口质量流量百分率随速度的变化情况,如图4所示。

图4 不同出口流量分配率与速度关系
从图4中可以看出,=23 mm球形流域各出口的质量流量分配率基本相等,即说明三个出口同时工作时不会出现某个出口处的质量流量满足不了给定需求;此外,各出口质量流量分配率与入口速度基本无关。
根据文献[12]减小水击的措施可知,当管路串联一个容积50 ml的集液腔后,系统管路的水击压力会降低10%左右。由于=23 mm球形流域的体积为50.965 ml,所以在布置空间允许的条件下,尽量采用=23 mm球形空槽四通接头能够显著的降低水击压力。
3 原始管路计算与分析
3.1 管路系统原始模型
根据某轨姿控系统中关键组件的固定位置和发动机的工作要求对管路系统进行布置,如图5所示。

图5 原始管路结构
3.2 模型网格及边界条件
将管路系统模型导入网格划分软件,管路采用扫掠方式而接头采用非结构化网格进行网格划分。管路系统的边界条件根据空间结构形式进行合理的布置,选取5个固定支点。管路的弹性模量=204 GPa,密度=7930 kg/m3,泊松比=0.285,抗拉强度σ=520 MPa,屈服强度σ=206 MPa。网格模型和边界条件如图6所示。

图6 模型网格及边界条件
3.3 模型计算及结果分析
采用ANSYS Workbench对原始管路模型进行仿真模拟,得出原始模型的前20阶固有频率值如表1所示。

表1 原始管路模态
根据轨姿控系统工作要求,系统的工作频率在910 Hz附近。从表1中可以看出,原始管路第10阶和第11阶模态刚好在系统的工作频率范围附近,即容易产生共振现象。
在模态分析的基础上,对各个方向施加载加速度功率谱密度曲线对其进行随机振动分析,其曲线如图7所示。

图7 加速度功率谱密度曲线
根据上述曲线,计算随机振动下各个方向的最大应力、位移值,结果如表2所示。由表2可知,、和方向上的最大应力值均小于材料的屈服强度;但在方向上的位移值明显偏大,并且在方向上的其他部件布置相对较紧密,容易与其他部件产生干涉,进而破坏其结构。

表2 各方向随机振动载荷下的最大应力和位移(一)
4 改进管路计算与分析
4.1 管路系统改进模型
由于整个轨姿控系统中外围和中间部位无组件占用空间位置且不影响管路的布置;遂针对原始管路系统存在的缺陷和产生的不利影响,并结合管路布置的原则对原始管路系统进行如下改进:
(1)考虑管路的补偿,原始管路中的直管改成弯管布置;
(2)根据“在考虑管路补偿的前提下,管路弯得越少越好”的原则,原始管路中直管改成弯管不应弯得太大;
(3)采用上述计算得到的=23 mm球形空槽四通接头替换直通槽接头进行管路连接;
(4)考虑三通接头流量均匀分配原则,选用垂直端为入口、水平两端为出口。
上述对原始管路系统具体改进如图8所示。
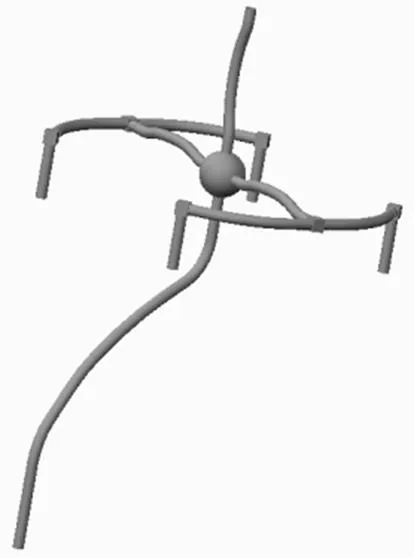
图8 改进管路结构
4.2 模型网格及边界条件
采用与原始模型相同方式对其进行网格划分;管路系统的边界条件根据空间结构形式进行合理布置,选取7个固定支点,材料选用相同的材料,其网格模型和边界条件如图9所示。

图9 模型网格及边界条件
4.3 模型计算及结果分析
对改进管路模型进行模拟分析,得出改进模型的前20阶固有频率值如表3所示。

表3 改进管路模态
从表3中可以看出,改进管路的固有频率都远离了系统工作的频率910 Hz,即很好的避免了共振现象发生。
同样在模态分析的基础上,采用上述加速度功率谱密度曲线对改进模型进行随机振动计算,得到各个方向上的最大应力、位移值,具体如表4所示。
由表4可知,、和方向上的最大应力值均小于材料的屈服强度,并且在方向上的最大位移为0.16502 mm,相比原始管路减小了0.72878 mm,效果显著。

表4 各方向随机振动载荷下的最大应力和位移(二)
5 分析结果对比
通过模态结果对比发现:原始管路模型的固有频率刚好位于轨姿控系统工作频率910 Hz附近,即容易引发共振现象;而改进管路模型的固有频率最接近轨姿控系统工作频率的也只有974.33 Hz,距离系统工作频率较远,很难引发共振现象。
通过随机振动分析对比发现:原始管路模型在各个方向上的最大应力值均小于材料的屈服强度,但在方向上的位移值明显偏大,很容易与其他部件发生干涉;而改进管路模型在方向上的应力和位移值相对原始模型分别减小了66.62 MPa和0.72878 mm,降低效果显著,继而避免了与其他部件发生干涉的现象,并且在和方向上的应力和位移值相比原始管路模型增加幅度较小。
6 结论
通过上述3种四通接头和2款管路模型研究分析,得到以下结论:
(1)在3种四通接头中,=23 mm的球形四通接头各个出口的质量流量基本相等,且能够显著的降低水击压力,但其受到布置空间的限制。
(2)改进管路模型很好的避开了系统工作的频率范围,即避免了共振现象的发生。
(3)改进管路模型减小了在方向上随机振动的应力和位移值,有效的避免了管路系统与其他部件之间发生干涉。
[1]苏尔皇. 液压流体力学[M]. 北京:国防工业出版社,1982.
[2]程谋森,刘昆,张育林. 推进剂供应管路内液体瞬变流一维有限元计算[J]. 推进技术,2000,21(4):12-15.
[3]程谋森,张育林. 航天器推进系统管路充填过程动态特征(I)理论模型与仿真结果[J]. 推进技术,2000,21(2):25-28.
[4]程谋森,张育林,姜春林,等.航天器推进系统管路充填过程动态特性(II)实验模拟与结果评估[J]. 推进技术,2000,21(3):1-5.
[5]聂万胜,陈新华,戴德海,夏鹏,庄逢辰. 姿控推进系统发动机关机的管路瞬变特性[J]. 推进技术,2003,24(1):6-8.
[6]权凌霄,孔祥东,俞滨,白欢欢. 液压管路流固耦合振动机理及控制研究现状与发展[J]. 机械工程学报,2015,51(18):175-183.
[7]于雯,嵇春艳,李曙生. 基于 ANSYS 的高精度管路系统抗冲击仿真方法及试验验证[J]. 船舶工程,2017,39(1):73-85.
[8]贾凯军,冯光明,郑艳栋,范玮刚,李鹏举. 混合管与充填软管间[J]. 矿山机械,2010,38(20):56-58.
[9]王福军. 计算流体动力学分析[M]. 北京:清华大学出版社,2004.
[10]杜平,胡夏夏. 管路系统的模态分析[J]. 轻工机械,2012,30(3):29-31.
[11]张炜,鲍桐,周星. 火箭推进剂[M]. 北京:国防工业出版社,2014.
[12]张峥岳,康乃全. 轨姿控液体火箭发动机水击仿真模拟[J]. 火箭推进,2012,38(3):12-16.
Simulation Analysis and Optimization of Pipeline System in an Orbit and Attitude Control System
HE Dihua1,LUO Weidong1,2,HUANG Linsen1,LIU Zhong3
( 1.School of Mechanical Engineering, Guizhou University, Guiyang 550025, China; 2.Mingde College of Guizhou University, Guiyang 550025, China; 3.Limited Liability Company of Guizhou Space Flight Sun Technology, Zunyi 563000, China )
According to the fixed position of key components in an orbit and attitude control system, using by ANSYS Workbench, the pipeline and pipe joints are analyzed and the original pipeline is enhanced by the following analysis results and the principle of pipeline arrangement. Compared with the original pipeline, this paper finds that the natural frequency of the improved pipeline model avoids the working frequency 910 Hz of the operating system. In the random vibration, the equivalent stress and displacement in thedirection are significantly reduced to 66.62 MPa and 0.72878 mm and the equivalent stress and increment of displacement in theanddirections are small. The flow distribution of the four-way pipe joint is more reasonable and it can reduce the nearly 10% water hammer pressure which can effectively improve the orbit and attitude control system layout of the pipeline.
the orbit and attitude control system;the four-way pipe joint;pipe model;simulation analysis
TH138.8+4
A
10.3969/j.issn.1006-0316.2018.01.003
1006-0316 (2018) 01-0011-07
2017-06-09
贵州省自主创新项目(KYKZ-001);贵州省科技支撑计划项目(黔科合支撑[2016]2319)
贺迪华(1992-),男,江西吉安人,硕士研究生,主要研究方向为姿轨控动力系统。
通讯作者:罗卫东(1962-),男,贵州习水人,教授,硕士生导师,主要研究方向为姿轨控动力系统、汽车及其零部件设计理论与方法。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
中国特种设备安全(2022年4期)2022-07-08
数学物理学报(2022年3期)2022-05-25
数学年刊A辑(中文版)(2020年3期)2020-10-27
民用飞机设计与研究(2020年1期)2020-05-21
党的生活(江苏)(2020年12期)2020-03-08
山西冶金(2019年2期)2019-05-31
中国工程咨询(2016年3期)2016-02-13
中国新技术新产品(2015年12期)2015-07-18
太空探索(2014年4期)2014-07-19
