
焊接机器人的运动学分析与轨迹规划
2018-02-08 23:20唐健
价值工程 2018年6期
唐健
摘要:本文是在pr1400焊接机器人的基础上进行研究的,对其整体结构和运动学过程及轨迹进行了分析并采用标准d-h建立坐标系。同时利用matlab机器人工具箱建立运动模型和运动仿真,得到光滑的角加速度、关节角位移、角速度的变化曲线及运动末端轨迹曲线。更重要的是仿真模拟可以使研究人员避免一些计算错误,提高机器人轨迹规划的可靠性。
Abstract: This paper is based on pr1400 welding robot. The whole structure and kinematics process and trajectory are analyzed and the coordinate system is established by standard d-h. At the same time, the matlab robot toolbox is used to establish the motion model and motion simulation, and the smooth curve and end-of-track curve of angular acceleration, joint angular displacement and angular velocity are obtained. More importantly, simulation can help researchers avoid some computational errors and improve the reliability of robot trajectory planning.
关键词:焊接机器人;仿真;运动学分析;轨迹规划
Key words: welding robot;simulation;kinematics analysis;trajectory planning
中图分类号:TP242.2;TH113.2 文献标识码:A 文章编号:1006-4311(2018)06-0122-03
1 介绍
随着中国制造2025的提出,我国的工业化水平在不断地发展,产品和技术在不断地推陈出新。产业的自动化也在不断提高,相应的焊接机器人的发展处于日新月异[1]。大量的焊接机器人投入到工业生产之中,扮演着越来越重要的角色。对于焊接机器人的研究来说,其具有研究的成本高、周期长等不利缺点[2]。所以针对这样的问题,研究人员利用仿真技术在计算机将实验的数据与结果模拟出来,这样就能更快更方便的得到准确的方案[3]。在本文中,我们分析了焊接机器人的整体结构和相应参数,同时建立了标准d-h参数法下的坐标系,求解出连杆结构的运动方程。同时利用matlab工具箱对机器人的运动进行了相应的模拟,并规划处轨迹曲线。建立6个环节的离线轨迹规划的数学模型,对其建立solidworks实行模型进而分析,实现对焊接机器人的运动控制。
2 pr1400焊接机器人D-H坐标系模型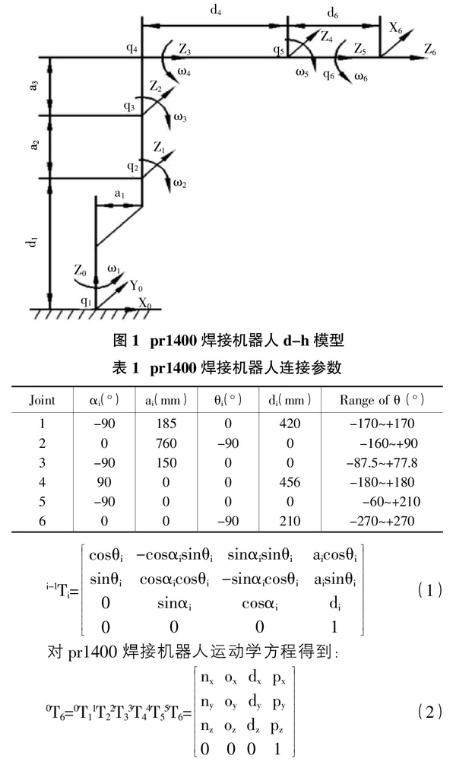
焊接机器人pr1400是由腰座、肩部、大臂、肘部、小臂、腕部组成。在机器人末端加装有焊枪,在肘部上方加装有送丝机。该款焊接机器人共有六个自由度,依次为肩部回转、大臂俯仰、肘部俯仰、小臂回转、手腕俯仰、手腕末端法兰回转。[4]在图1所示的坐标系包括4个参数连杆偏移“d”、角度“θ”、关节长度“a”和旋转角度“α”。这里的关节角度“θ”是关节变量,其他三个参数值保持不变。具体参数值见表1。
3 pr1400焊接机器人正向运动学分析
从表2上中比较仿真值和计算值的数据得到两者是一样的,所以结果是三维模型的建立是正确的,可以用来进行轨迹的规划。
6 pr1400焊接機器人轨迹规划与仿真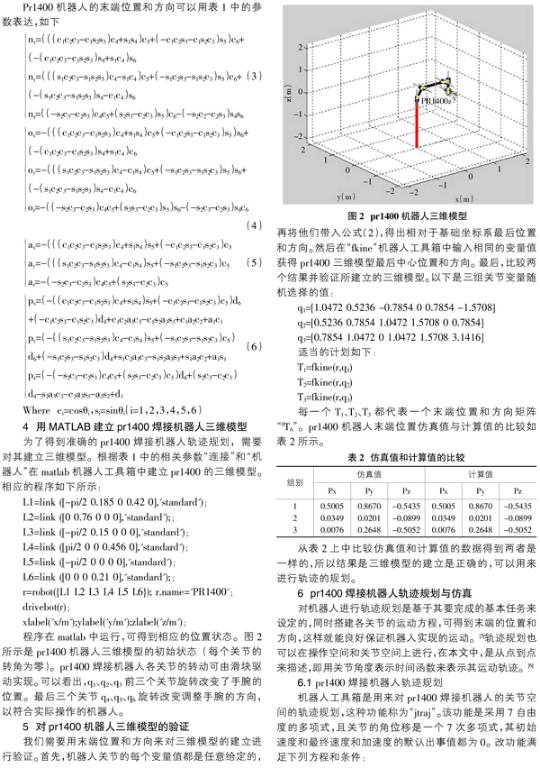
对机器人进行轨迹规划是基于其要完成的基本任务来设定的,同时搭建各关节的运动方程,可得到末端的位置和方向,这样就能良好保证机器人实现的运动。[5]轨迹规划也可以在操作空间和关节空间上进行,在本文中,是从点到点来描述,即用关节角度表示时间函数来表示其运动轨迹。[6]
6.1 pr1400焊接机器人轨迹规划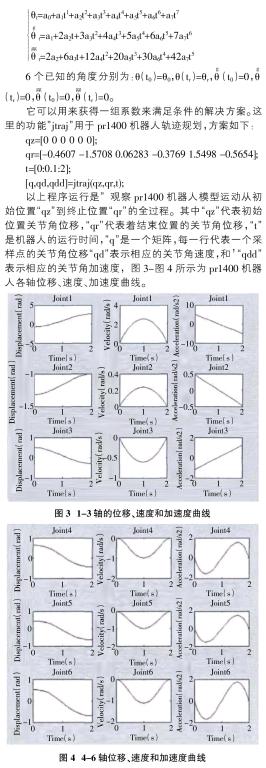
7 结论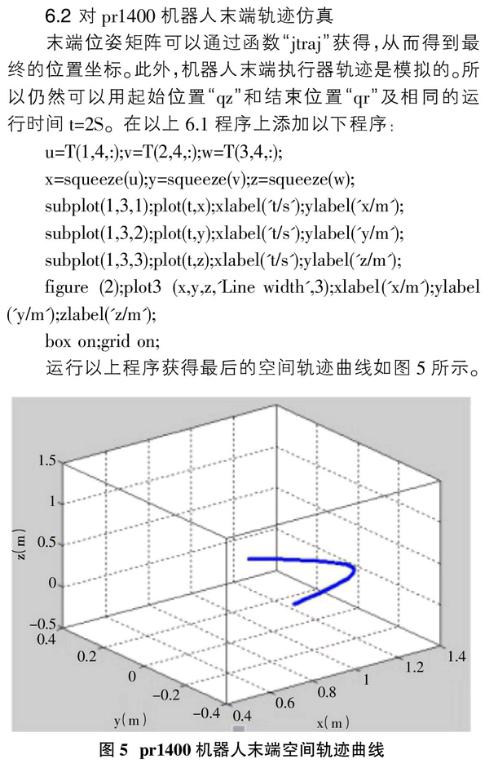
每一个关节角位移是从0弧度逐渐变化到图5和图6的第一列中的“qr”中的末端关节角。第二列各关节角速度初始和结束速度都是是0,而最大速度在中间在时间t =1秒。加速度曲线在第三列,从初始位置到结束位置角度从0到各个值,且其中最大值出现在正负方向上的运动之间。总体情况而言,角位移曲线、速度曲线、加速度曲线相对平滑且无突变,表明机器人在运动过程中相对稳定,没有明显的振动产生。pr1400机器人从初始位置“qz”到终止位置“qr”后2S和时间采样间隔0.1秒,且运动曲线是平滑的,使得机器人在操作过程产生的冲击力小,保证了焊接质量。
参考文献:
[1]蔡自兴.机器人学[M].北京:清华大学出版社,1999.
[2]周律,陈善本,林涛,陈文杰.基于局部视觉的弧焊机器人自主焊接轨迹规划[J].焊接学报,2006,27(1):49-52.
[3]陈鲁刚,平雪良,徐稀文,吉祥.基于ADAMS的焊接机器人轨迹规划[J].江南大学学报,2001,10(2):196-200.
[4]栾佳绘,童一飞,李东波.基于模糊理论的pr1400焊接机器人系统可靠性预计[J].机械设计与制造工程,2017,46(4):38-41.
[5]魏召刚,罗鹤晖.基于动力学模型的移动焊接机器人焊接轨迹自动跟踪[J].电焊线,2015,45(2):82-85.
[6]闫华,刘极峰,邱胜海,王孜凌.空间焊缝弧焊机器人焊接路径自动规划研究[J].机械设计与制造,2015,08(2):106-107.endprint
猜你喜欢
科技资讯(2016年18期)2016-11-15
企业文化·下旬刊(2016年4期)2016-04-28
机械制造文摘·焊接分册(2014年3期)2014-08-14
