模型潜艇自动操控系统设计与实现∗
2018-02-07 05:45申传俊肖翼洋丁泽民张士成
舰船电子工程 2018年1期
申传俊 肖翼洋 丁泽民 张士成
(1.海军湛江航保修理厂 湛江 524002)(2.海军航空大学青岛校区 青岛 264001)(3.海军工程大学动力工程学院 武汉 430033)(4.陆军军事交通学院镇江校区 镇江 212003)
1 引言
模型潜艇的自动操纵控制能够为模型潜艇水下运动规律探索[1],粘性流场计算与阻力分析[2],航行水动力特性研究[3],水动力参数辨识[4],操控系统[5]性能的验证提供方便。实际模型潜艇有相当比例的控制方式为有线控制,给控制带来一定的弊端,一定程度限制了模型潜艇的机动。遥控式模型潜艇操控系统则可以克服上述限制,从而能够较好的模拟潜艇的水下运动。
本文致力于解决遥控式模型潜艇操控所面临的技术难题,设计制作集中控制方式的遥控式模型潜艇操控系统。该系统由遥控器以手柄或者键盘输入方式发出遥控信号,通过WIFI无线通信方式[6]传输信号,主控制器收到控制信号后,自动解算,发出相应的操控信号,经模拟放大电路放大后,输入驱动电路,控制执行机构,进行相应的注水、排水及转舵,进行浮力调整,纵倾均衡控制,控制主推进器转速,使模型潜艇自动上浮或者下潜,机动到指定的深度和航向,并能稳定于指定的姿态。
2 模型潜艇自动操控系统构成
2.1 主控制系统构成
模型潜艇自动操控系统的主控制系统组成如图1所示。
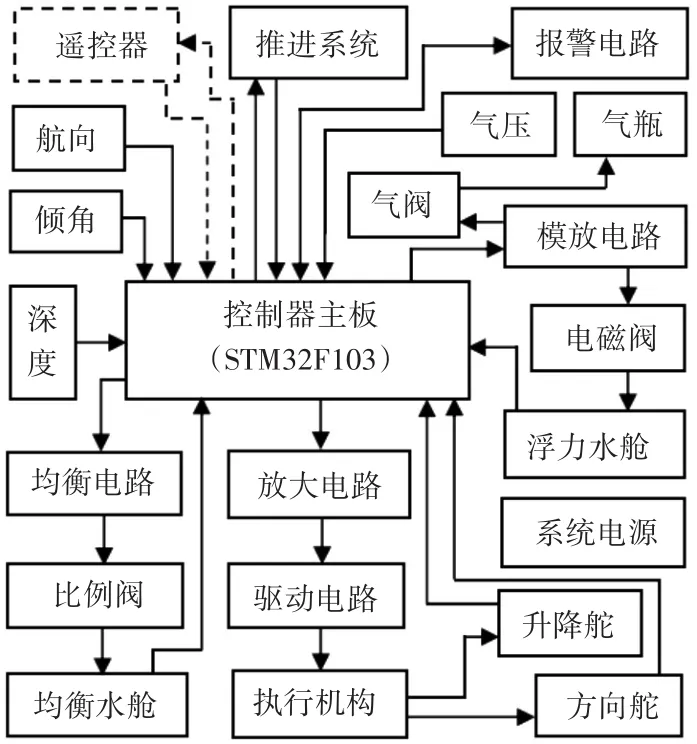
图1 主控制系统组成框图
该控制系统由以32位微处理器STM32F103[6]为核心的主控制器、倾角传感器、深度传感器、流量计、模放电路、驱动电路、信号取样电路、舵角反馈机构、舵机执行机构、电源系统、高压气源系统、压载水舱系统、浮力调整系统(图1中浮力水舱包含压载水舱与浮力调整水舱)、纵倾均衡系统、推进系统和报警系统等共同构成。其中,浮力调整系统由浮力调整水舱、气源系统、驱动电路、阀件、流量计等共同构成;纵倾均衡系统由均衡电路、比例阀、流量计和纵倾均衡水舱等共同构成。
2.2 遥控系统构成
遥控系统由以增强型单片机STC12C5A60S2为核心的遥控器主板和WIFI通信模块、电源系统、显示器、键盘、操控手柄及无线路由器等共同构成。
3 操控系统原理与工作流程
3.1 航向控制原理
关于潜艇的航向控制,有经典的PID控制方法[7]以及模糊控制[8]等方法。本模型潜艇的航向由方向舵进行控制,采用PID控制方式,即输入指令为给定航向θ0,按照偏航角θ,偏航角速率信号dθdt,偏航角积分信号∫θd t的控制规律来进行舵角控制,即方向舵偏舵角α1与偏航角θ符合下列规律[7,9]:

式(1)中,Kθ,Kd,Ki分别为比例、微分、积分系数。
3.2 深度控制原理
模型潜艇的深度由模型潜艇尾部的升降舵进行控制[10],采用PD控制方式,即输入指令为给定深度H0,将当前深度差H,深度速率信号dH dt,纵倾信号φ,纵倾速率信号dφdt进行综合,输入放大电路放大,再输入功放电路后输出,控制相应的阀件,从而进行升降舵舵角控制,达到控制模型潜艇深度的目的。
升降舵偏舵角α2与深度差 H,深度微分dH dt,纵倾角φ,纵倾角微分dφ dt符合下列规律[11]:

式(2)中,Kh、Kd,分别为深度差比例和微分系数,Kz、Kdz分别为纵倾角比例和微分系数。
3.3 下潜与上浮控制原理
模型潜艇浮于水面或在水中时遵循阿基米德定律,即模型潜艇受到的浮力与其排开水的重力相等[12]。
当模型潜艇需要下潜时,由主控制器控制注水阀和通气阀,向压载水舱注水(此时压载水舱内压力平衡,水被注入,而空气经通气阀被排出),模型潜艇质量增加,所受重力大于浮力,模型潜艇将由水面状态过渡到水下状态。
当模型潜艇需要上浮时,由主控制器控制气阀开启,利用高压气体吹除压载水舱的水,造成浮力大于模型潜艇的重力,模型潜艇逐步由水下上浮到水面。
3.4 浮力调整与纵倾均衡工作原理
浮力调整[12],当模型潜艇到达水下后,由于环境的变化,当模型潜艇所受的浮力大于重力时,由主控制器自动解算,给出注水量指令,经放大电路放大后驱动电磁阀,控制浮力调整水舱注水,减少浮力,使得所受重力与浮力平衡;当模型潜艇受的浮力小于重力时,由主控制器自动解算,给出排水量指令,经放大电路放大后驱动电动气阀,吹除浮力调整水舱存量水,增加浮力,使得所受重力与浮力平衡。浮力调整使得模型潜艇所受浮力与重力平衡,可以保证模型潜艇在某一深度范围内的潜浮状态。
纵倾均衡[12],当模型潜艇因为环境改变,自身载荷发生变化,水下纵倾平衡被破坏后,需要人工或者利用计算机进行调整,该过程即为纵倾均衡。当纵倾发生变化后,由主控制器自动解算,给出移水量指令,经放大电路放大后驱动电液比例阀,控制设置于模型潜艇首尾的纵倾均衡水舱1、2之间的移水量,流量计计量移水量,从而控制模型潜艇的纵倾。
处于水下纵倾状态的模型潜艇,其平衡方程为
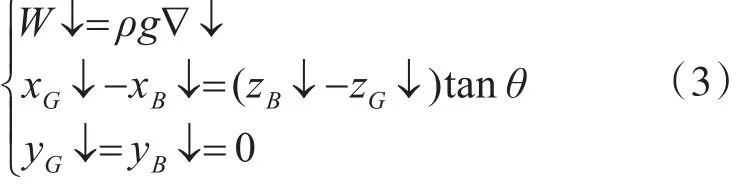
式(3)中,W↓为水下所受重力,∇↓为水下状态的模型潜艇水密艇体的排水体积,xG、yG、zG分别为水下状态时模型潜艇重心G的纵坐标、横坐标和垂向坐标,xB、yB、zB分别为水下状态时模型潜艇浮心B的纵坐标、横坐标和垂向坐标,θ为模型潜艇水下状态的纵倾角,↓表示水下状态。
3.5 推进系统控制原理
主推进系统与侧推进系统均由直流无刷电机和传动轴及螺旋桨共同构成(侧推系统的电机功率小于主推电机功率),直流无刷电机的控制调速由ARM发出PWM信号,经过驱动放大电路放大后,从而实现对直流电动机调速控制。利用H桥式驱动电路作为直流电机正反转调速功率放大电路的驱动模块,采用霍尔传感器对直流电机的转速进行测量,经放大电路后,将脉冲信号送入ARM,从而实现对推进直流无刷电机的转速测量。
3.6 无线通信工作原理
遥控器利用WIFI无线通信网络实现模型艇的遥控,即遥控器主板将控制信号输入WIFI控制芯片,编码后输入无线路由器,无线路由器发射信号,模型艇内置路由器接收信号,WIFI控制芯片进行解码,输入主控制器,模型艇将运算所得控制信号实时传递给WIFI控制芯片,编码后由无线路由器发送给遥控器,遥控器无线路由接收信号,WIFI控制芯片进行解码,输入遥控器单片机,由液晶显示器进行显示。
3.7 操控系统工作流程
遥控器开机,发出遥控信号,控制主控制器开机,主控制器开机后启动系统。系统自检通过后,将模型潜艇当前航向、深度、纵倾角、舵角、浮力不均衡量、气体气压、压载水舱水量、浮力调整水舱水量、蓄电池电压与剩余电容量等信息实时发送到遥控器,等待遥控器发出指令信号。当接收到指令信号后,主控制器自动解算,给出相应的注水、排水信号、操舵角信号、浮力调整、纵倾均衡调整信号,输入相应的放大及驱动电路,进行注水、排水、操舵与浮力调整及纵倾均衡,并操纵主推进装置配合操舵动作进行模型潜艇机动,使模型潜艇运动到达指令航向、深度、指令纵倾角,并保持指定的深度与姿态。
4 操控系统电路及软件实现
4.1 操舵与均衡系统电路实现
操舵与均衡系统的主控制器核心电路如图2所示,控制系统的各部分组成及实现方式分别介绍如下:
·主控制器:以STM32F103RCT6为核心,STM32F103RCT6为意法半导体公司生产的32位微处理器,属于增强型ARM,内含Cortex-M3内核,其功能强大,实时性较好,I/O接口丰富,含有A/D,D/A电路,PWM以及多个定时器,读写速度快,功耗较低。
·传感器:包括舵角反馈电机、深度传感器、倾角传感器、液体流量计、气压传感器、主推进电机和侧推进电机转速传感器等。
·模拟放大电路:模拟放大电路前级先将各微弱的指令信号(-5V~+5V)进行电压放大后送入下一级功放电路,功放电路的输出可以驱动电磁阀、电液阀、通气阀、电动气阀、继电器和执行电机等。
·舵机执行机构:执行机构由主控制器发出控制信号,经过放大器放大后驱动继电器,控制直流电机拖动舵叶轴转舵。
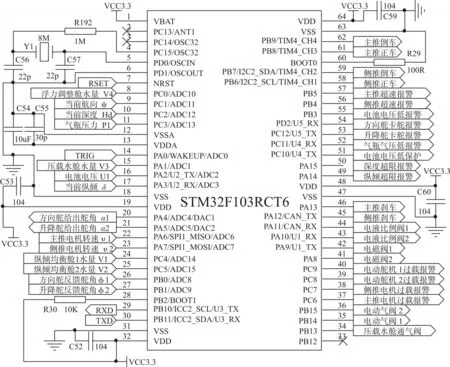
图2 主控制系统核心电路原理图
·舵角反馈机构:方向舵和升降舵反馈机构完全相同,包括减速齿轮和连杆等机械结构及反馈电机。连杆将舵叶轴向运动经齿轮传递到反馈电机,反馈电机将舵角转化为电压信号,经电缆传输到取样电路,最终送入主控制器。
·舵角电气限位装置:舵机控制线路安装有舵角电气限位装置,当舵角接近满舵时,进行自动限位,防止发生舵叶转动失控。
·信号取样电路:取样电路将输入的信号进行取样后,保持,送入主控制器。
·纵倾均衡系统:包括纵倾均衡水舱、电液阀、流量计、倾角传感器等。主控制器控制模放电路,驱动电液阀,控制设置于艇首和艇尾的纵倾均衡水舱之间的移水量,从而控制模型潜艇的纵倾。
4.2 浮力控制系统电路实现
浮力控制系统包括压载水舱系统和浮力调整系统。
·压载水舱系统:包括压载水舱、高压气瓶、电磁阀、气阀、液体流量计、模拟放大电路等。
主控制器控制模放电路从而驱动电磁阀与通气阀,进而控制压载水舱的注水量(由流量计计量),使模型潜艇质量增加,所受正浮力减少,模型潜艇由水面状态过渡到水下状态。主控制器控制模放电路从而控制气阀,利用高压气体吹除压载水舱内的水,使模型潜艇质量减少,所受正浮力增加,模型潜艇由水下状态过渡到水上状态。
·浮力调整系统:包括浮力调整水舱、高压气瓶、电液比例阀、气阀、液体流量计、模拟放大电路等。
主控制器控制模放电路,驱动电液比例阀,从而控制浮力调整水舱注水量(由流量计计量),从而减少浮力;主控制器控制模放电路,驱动气阀,吹除浮力调整水舱的水(由流量计计量),从而增加浮力。
4.3 推进电机及其控制系统电路实现
推进电机采用直流无刷电机[13],调速控制系统原理如图3所示。
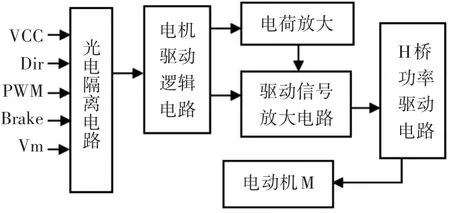
图3 推进系统调速控制原理框图
控制系统包括:光电隔离电路、电机驱动逻辑电路、驱动信号放大电路、电荷放大电路、H桥功率驱动电路等四部分。其主要控制信号有:电机运转方向信号Dir、电机调速信号PWM、电机制动信号Brake,Vcc为驱动逻辑电路部分提供电源,Vm为电机电源电压。
4.4 遥控器及通信电路实现
遥控器主板以单片机STC12C5A60S2为核心,辅以输入键盘和操控手柄,显示电路(128*64液晶显示器),电源电路(稳压电路和6V电池)等共同构成。
通信电路由通信芯片ESP8266和无线路由器(功率增强型)等共同构成,遥控器发出的指令信号经ESP编码后输入无线路由器,信号发射后,被模型潜艇的无线路由器接收,ESP解码后输入模型潜艇主控制器,主控制器获取的相应参数,经ESP编码后由路由器发送给遥控器。
4.5 电源与报警系统电路实现
·电源系统:主控制系统的电源系统由60V蓄电池、电源稳压电路(输出+3.3V,+5V,±12V,+24V,+48V)、保护电路、状态指示电路共同构成,向主控制器、模拟放大电路、功率放大电路、舵机执行机构、压载水舱系统、均衡系统、报警系统、浮力调整系统、主推进系统与侧推进系统(均使用48V推进电机)等供电。遥控器由干电池供电,经稳压后供电路使用。
·报警系统:由触发电路、报警指示灯、蜂鸣器等共同构成,对超深、危险纵倾、卡舵、电动舵机过载、主推进电机过载、电池电压低等信号进行报警。
4.6 操控系统软件实现
操控系统软件分为遥控器系统软件和主控制器系统软件。
遥控器,其核心为STC12C5A60S2单片机,其系统软件采用Keil C51环境开发,利用C语言实现。该系统软件采用模块化结构,分为通讯、信号处理、信号发送、信息显示几个任务子程序。
主控制器,其核心为微控制器STM32F103RCT6,其系统软件采用MDK5开发环境,利用C语言实现。软件采用模块化结构,分为通讯、自检、信号采集与处理、信号发送、危险状态处置与报警等几个任务子程序。主控制器要实施模型潜艇航向、深度的自动控制及危险状态的应急处置,其系统需要响应事件中断,因此,需要事先设置中断优先级别。主控系统的中断事件主要有:电池电压低、危险深度、危险纵倾、舵机过载、电机超速、卡舵、气瓶气压低等。在上述中断事件中,设定中断优先级为:电池电压低>气瓶气压低>主推进电机过载>升降舵电动舵机过载>升降舵卡舵>主推进电机超速>方向舵电动舵机过载>侧推进电机过载>危险深度>危险纵倾>方向舵卡舵。
5 结语
设计了一种模型潜艇自动操控系统,其主控制器和遥控器分别以STM32F103RCT6和STC12C5A60S2为核心,结合传感器、主推进系统、舵机执行机构、反馈机构、纵倾均衡系统、压载水舱系统、浮力调整系统、电源系统、报警系统等共同构成自动操控系统。经过在航模池进行实际航行试验,该模型潜艇能够在150m范围内进行遥控,最大下潜深度1.5m,能够有效地控制上浮、下潜与机动,并能稳定于给定的航向、深度与姿态,主推进装置正车、倒车功能正常,侧推进装置功能正常,系统报警功能正常。航模池试航试验结果表明,该模型潜艇自动操控系统操控性能达到预期的设计目标。
[1]李麓,李维嘉.潜艇水下六自由度运动仿真数学模型[J].计算机仿真,2001,18(5):33-38.
[2]邱辽原.潜艇粘性流场的数值模拟及其阻力预报的方法研究[D].武汉:华中科技大学,2006:84-100.
[3]王燕飞,朱军,张振山.评估水动力系数对潜艇操纵性影响的一种方法[J].船舶力学,2005,9(5):61-68.
[4]朱怡.水下潜器水动力模型简化及参数辨识研究[D].哈尔滨:哈尔滨工程大学,2007:32-42.
[5]李光磊,周永余,陈永冰,等.基于潜艇自动操纵系统的模型简化及仿真[J].船电技术,2009,29(7):19-23.
[6]杨郑民,徐轶群.基于WIFI和STM32船舶制造业智能配电桩系统设计[J].电子技术应用,2016,42(10):69-72.
[7]周永余.舰艇自动操舵仪[M].武汉:海军工程大学,2004:12-15.
[8]熊瑛.基于智能控制的潜艇操纵运动仿真研究[D].武汉:中国舰船研究院,2011:63-75.
[9]陈小静.无人潜航器的自动航行系统研究[D].大连:大连海事大学,2008:21-22.
[10]孙元良,马运义,邓志纯.潜艇和深潜器的现代操纵理论与应用[M].北京:国防工业出版社,2001:12-30.
[11]何卫华,王益民,黄健鹰.潜艇自动操 纵控制系统的基本原理及其现状[J].舰船科学技术,2005,17(3):20-24.
[12]苏玉民,庞永杰.潜艇原理[M].哈尔滨:哈尔滨工程大学出版社,2005:40-46.
[13]郑宏,张佳伟,徐文成.基于STM32的直流无刷电机正弦波控制系统[J].电子器件,2016,39(6):1521-1526.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小猕猴学习画刊(2021年8期)2021-08-27
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
知识就是力量(2019年12期)2019-01-14
试题与研究·中考物理(2015年4期)2016-04-07
少儿科学周刊·少年版(2015年2期)2015-07-07