
基于平方根迭代UPF滤波的无源定位算法研究
2018-02-05 01:36:07汪语哲杨正凯李云昭初昕宇冉春秋
大连民族大学学报 2018年1期
汪语哲,杨正凯,王 宁,李云昭,初昕宇,冉春秋
(大连民族大学 a.机电工程学院;b.大学生创新创业教育中心,辽宁 大连 116605)
仅有角度测量的固定辐射源无源定位问题是一个经典的导航问题。在现代战争中,快速定位对飞行器有威胁的基地辐射源如雷达、电子干扰源和红外辐射源等可以较大程度提高战斗飞行器的生存能力。在航行过程中,空间飞行器为了防止敌方雷达跟踪,常常需要关闭向外部发射电磁波来探测目标位置和速度的主动探测装置(如机载主动雷达等),而靠仅能够测量视线角的被动接收装置来接收目标能量辐射以保证自身安全。这种被动式定位方式作用距离远,接收隐蔽,不易被对方察觉,对于增强系统在复杂电磁环境下的生存能力和工作能力具有重要意义,是飞行器定位辐射源的常用方法[1]。此外,海上遇难搜救电子侦察定位、空间飞行器测控、卫星定位等问题也同样属于无源定位问题。因此,无源定位问题的研究具有重要的意义和广阔的应用前景。
现有的固定辐射源无源定位,研究的重点在于定位精度、收敛速度和算法效率。最早的定位估计方法是直线(两点)定位算法,以及最小二乘估计算法(Least Square Estimate,LSE)[1]。LSE是一种数据批量处理方法,计算中收敛速度较慢,且仅当整个系统没有噪声干扰时,才能收敛到真值。随后,扩展卡尔曼滤波算法(Extended Kalman Filter,EKF)作为一种非线性随机函数逼近方法,得到了学者的普遍关注[2]。Spingarn注意到了LSE和EKF的相似性,采用EKF算法处理含噪测量方程,提高了定位的收敛速度和算法的效率。为了进一步提高定位的收敛速度,Challa等[3]提出一种测量线性化状态方程的EKF定位方法。随着计算机技术的高速发展,数据处理速度大幅度提高,很多计算量较大的算法已经可以用于处理无源定位等对于实时性需求较高的非线性估计问题。Gordon[4]考虑了采用粒子滤波作为无源定位算法,在某些条件下取得了比LSE和EKF算法更好的估计效果。
1 问题的描述
为使问题简单化,并具有较强的代表性,考虑典型的平面无源定位模型如下:
(1)由于定位距离和地球半径的数量级差距在100倍以上,可以不考虑地球的球面效应;
(2)不考虑飞行器自身定位的导航误差;
(3)不考虑目标的高度,只考虑二维平面的定位情况;
(4)将载机视为一个质点,且以速度v=v0沿某一方向(不与载机的初始位置和辐射源之间的连线方向重合)做匀速直线运动(载机的加速度a≡0)。
在上述假设条件下,一种典型的平面无源定位问题原理图如图1。飞行器沿辐射源边缘做匀速直线运动,令飞行器在初始时刻(t=0)的位置表示为ξ0=(x0,y0)T。
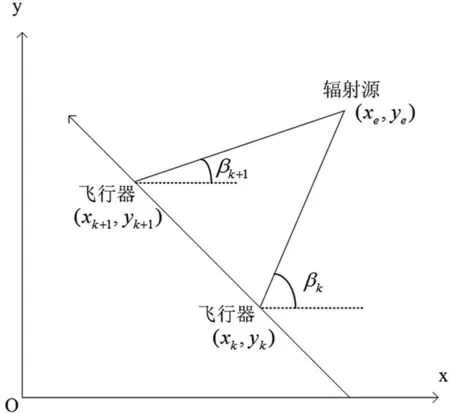
图1 一种典型的平面无源定位问题原理图
载机在k时刻的位置表示为ξk=(xk,yk)T,η=(xe,ye)T为辐射源的地理位置,则系统的数学模型可以描述为
βk=hk(xe,ye)+ωk;
(1)
(2)
设采样周期为T,(vx,vy)表示载机的速度v0在x和y轴上的分量,载机在k时刻和初始时刻(t=0)的位置关系可以表示为
(3)
经离散化的系统观测方程可以表示为
(4)
式中,ωk为系统的测量噪声,简单起见,假设ωk为高斯白噪声,则有
(5)

2 传统滤波方法
无源定位问题的经典算法是粒子滤波算法(Particle Filter,PF),该算法1993年由Gordon提出,一开始用于解决非线性估计问题,取得了较好的效果。然而随后研究人员发现,该算法对于先验概率密度函数的选取十分敏感,只有当先验概率密度函数充分逼近被估计的非线性随机系统的真实概率密度分布时,才能取得较好的估计效果。这是由于PF算法选取的提议函数不含任何观测信息,在被估计系统的非线性非高斯程度较强时,收敛速度常常较慢,甚至难于收敛。针对这一问题,文献[5]提出了采用EKF算法作为提议函数的改进粒子滤波算法,该算法称为EPF。EPF在一定程度上提高了算法的收敛速度。然而,由于EKF算法本质上是一种对于非线性函数的一阶泰勒逼近,在系统非线性程度较高时,EKF算法容易发散,EPF常常存在类似于EKF精度不高、收敛速度慢等问题。
3 滤波方法的改进
针对上述EPF算法存在的问题,文献[4]提出采用UKF算法作为提议函数,取得了较高的估算精度。然而,UKF算法的三个参数影响着采样点沿状态均值的分布状况。如果参数选择不当,可能导致采样半径变大,影响算法的数值鲁棒性和估计精度;在实际仿真过程中同样发现,若三个参数选择不当,则UKF算法运行常常出错,这是由于当协方差矩阵P的行列式较小时,算法的数值鲁棒性难以保障。针对这一问题,文献[6]将标准UKF算法展开成矩阵平方根分解方式进行计算,设计了一种平方根迭代UKF (Square-root Unscented Kalman Fliter,SRUKF) 算法,在UKF迭代中采用了平方根作为迭代传递量,从而保证了协方差矩阵P的正定性。
3.1 SRUKF算法
(1)初始化:
(6)
式中,chol表示矩阵的克莱斯基分解,下同。
(2) Fork∈{1,2,…,∞},
a. Sigma点计算:
(7)
b. 时间更新:
χk|k-1=f[χk-1,uk-1]+E[vk-1] ;
(8)
(9)

(10)

(11)

(12)
yk|k-1=h(χk|k-1)+E[nk] ;
(13)
(14)
c. 测量更新方程:

(15)

(16)

(17)
(18)
(19)

(20)
(21)
式中:U=[u1,u2,…,uNy];Ny为测量向量维数。
对于i=1:Ny,
(22)
(23)
考虑到标准粒子滤波算法的缺陷,为了在保证不降低计算精度的情况下进一步提高计算效率,文章采用了SRUKF算法作为粒子滤波算法的提议函数,这里将其称为SRUPF。
3.2 SRUPF算法
(1) 初始化:

(24)
(2) 对于i=1,2,…,N,利用3.1给出的SRUKF算法更新粒子:

对于i=1,2,…,N,将重要性权值
(25)
作归一化处理。
(3) SIR重采样:

4 仿真结果
令固定辐射源位置为(xe,ye)=(226.92 km,226.92 km),观测者的初始位置(x0,y0)=(209.21 km,17.70 km),并以定常速度vx=-0.161 km·s-1,vy=0.161 km·s-1沿直线飞行。从k=0时刻开始,每300 s对目标方位测量一次,测量噪声的标准差σ=1°。

(26)
(27)
式中,M表示蒙特卡洛仿真的次数,作为一个低维参数估计问题,取较少的仿真次数就能够很好地衡量估计的效果[7],取M=20。文章所设计的UPF滤波器仿真结果如图2。
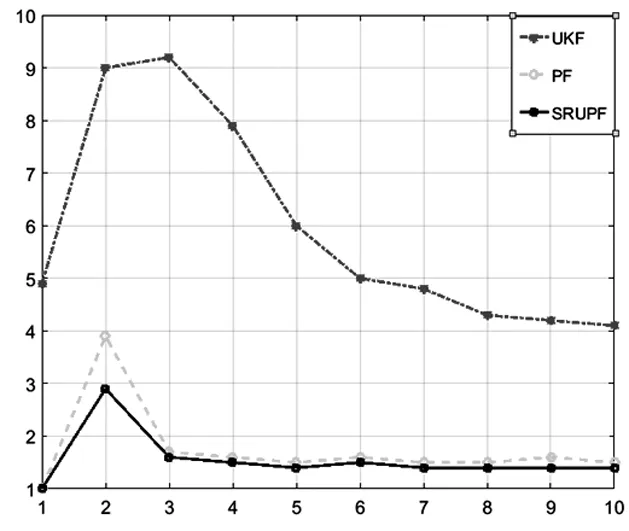
(a)X轴的RMSE估计误差
(b)Y轴的RMSE估计误差
从仿真结果的对比中发现,无论是X轴还是Y轴的位置,文章给出的SRUPF算法较PF和UKF算法相比,均具有更快的收敛速度和更高的估计精度。同时,计算得出,文章给出的SRUPF滤波器相比传统UPF在计算效果基本相同的前提下,节省了17%的计算时间。
5 结 语
针对固定辐射源无源定位这一经典的参数估计问题,文章采用平方根迭代UKF算法作为提议函数,改进了传统PF算法,给出了一种SRUPF算法的设计方案。仿真结果表明,文章所设计的SRUPF算法和标准粒子滤波器以及UKF滤波器相比,具有更高的估计精度,而且同标准UPF滤波器相比,在不降低计算精度的前提下,节省17%的计算时间。对于低维参数估计问题,UPF粒子滤波器具有更好的估计精度,计算量在硬件可承受范围内,因此,是无源定位的一种较好的新型方法,对机动目标跟踪问题的研究有一定理论意义和使用价值。
[1] KAEL S.Passive position location estimation using the extended Kalman filter[J].IEEE Transactions on Aerospace and Electronic Systems,1987(23):558-567.
[2] KLAUS B. An efficient method of passive emitter location[J].IEEE Transactions on Aerospace and Electronic Systems,1992(28):1091-1100.
[3] CHALLA S,FARUQI A. Nonlinear system-linear measurements approach to passive position location using extended Kalman filtering[C]. New York:IEEE TELCON-Digital Signal Processing Applications,1996: 665-669.
[4] 朱胤.非线性滤波及其在跟踪制导中的应用[D].哈尔滨:哈尔滨工业大学,2009:59-71.
[5] 汪语哲.滤波技术在高超声速大机动飞行器末制导中的应用[D].哈尔滨:哈尔滨工业大学,2013:19-51.
[6] FFATI K,SKONIECZNY M.EKF and UKF localization of a moving RF ground target using a flying vehicle [C].Windor:IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE),2017:1-4.
[7] OU X H; WU X; HE X X. Adaptive iterated UKF based node localization for WSN[J]. Chinese Journal of Sensors and Actuators,2015,28(2) :234-238.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2020年10期)2020-11-14 09:26:16
电子制作(2019年12期)2019-07-16 08:45:14
雷达学报(2018年5期)2018-12-05 03:13:16
雷达学报(2018年3期)2018-07-18 02:41:20
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
电子设计工程(2017年20期)2017-02-10 03:39:23
互联网天地(2016年2期)2016-05-04 04:03:23
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
