高速预警信息传输下的VANET路由协议研究
2018-02-05 10:20:03张勇
无线电工程 2018年2期
张 勇
(中华通信系统有限责任公司 无线电监测事业部,北京 100070)
0 引言
德国Daimler-Benz公司研究表明,在高速公路上车辆行驶时仅需要预先1 s的报警,就可以减少50%~90%的追尾事故发生[1];日本学者研究指出,借助于交通智能信息预警技术,能够将追尾碰撞降低率达62%;另外,根据研究发现,90%的道路交通事故是由驾驶员的操作失误引起的,因此汽车的行驶安全性主要还是取决于驾驶者[2]。人们对道路交通安全问题的关注度持续上升[3],使得车联网(Vehicular Ad Hoc Network,VANET)的研究[4]成为当前学术界和工业界研究的热点。VANET网络的本质[5]是在车辆与车辆之间、车辆与路边设施之间实现单跳或者多跳的无线通信,具有网络拓扑的动态变化、多跳路由、网络容量有限和可扩展性等[6]优点,可以满足高速公路上车辆间的无线通信要求,有效地减少了高速公路的事故率[7]。
在高速公路行驶中,驾驶员从发现隐患到最终采取制动措施的时间在0.3~1.0 s,平均时间在0.7 s[8]。按照高速公路行驶中100 km/h的平均速度,在0.7~1.0 s中的距离为100~150 m后驾驶员开始反应,再到最后的刹车制动和到安全间隔距离,对车辆驾驶员进行提前预警十分必要。而在国内,我国学术界对VANET网络的研究已经取得一些成果。例如,揭志忠建立了高速公路场景下VANET网络的可信机会路由算法[9];周连科设计了一系列VANET多跳广播协议,提高了广播效率[10];陈振等提出了一种基于相邻车辆间距的VANET分簇算法[11]。而传统的VANET路由协议包括基于网络拓扑结构的路由协议(如DSDV、AODV等)、基于地图的路由协议和基于位置的路由协议(如GPSR、LAR等)[12]。由于高速公路场景下车辆移动速度快、节点变化大导致网络拓扑结构变化大,使得网络时延大、网络传输准确率低等问题,需要对VANET路由协议进行改进[13]。数据包递交率是传输准确率的重要参考数据,本文从提高对数据包丢失率的估计和减少传播节点的角度进行研究,进而提出一种改进的VANET路由协议。
1 数据包丢失率估计
要保证VANET网络得到更好的传输效果,数据包丢失率成为其重要的参考标准。在复杂的电磁环境和节点高速移动下,对网络的丢失率进行计算是非常困难的。因此,引入探测包对数据包丢失率进行测量,但过多的探测包会严重占用带宽。对此,首先通过混合高斯模型对数据包丢失率的概率密度进行描述,再根据混合高斯模型的描述,采用更少探测包对数据包丢失率进行估计的最大后分布法[14]。
高速公路场景中影响数据包丢包率的参数包括车辆速度、车辆距离和车辆流量等。本文则通过高速公路中行驶车辆距离作为参考,通过混合高斯模型对不同距离条件下的数据包丢失率的概率函数进行统计[15],则有:
(1)
式中,k表示高斯函数的值;wi表示混合后的权重;μi,ξi分别表示平均数和第i阶的高斯方差。为更好地估算出式(1)中的wi,μi,ξi三者的值,本文引入期望最大算法(EM)。该算法的基本思想为交替用期望值和其中的一个最大值进行反复迭代。EM对预期数值的计算就像使用当前的参数估计计算一样,其具体的计算公式为:
(2)
根据式(2)估算出参数wi,μi,ξi:
(3)
(4)
(5)
根据式(2)、式(3)、式(4)和式(5)连续迭代直到相似函数收敛。


图1 MAP估计器的算法流程
通过上述算法可以得到平均最大后分布函数,从而估算出PLR,其计算公式为:
(6)

2 基于最短时延的路由算法设计
在完成对整个网络的数据包丢失率的估计后,则需要在此基础上对路由协议进行设计。本文提出The Shortest Delay(TSD)算法。该算法的核心思想为结合高速场景[13],定义一个危险区域(ZOR)。在该危险区域当中,故障车与行驶车辆为同一个方向。在第一辆车检测到前方故障后,开始生成预警信息并开始进行广播。只有在该区域内的车辆对ZOR预警信息进行处理,而非ZOR区域的则直接将该信息丢失。如车辆在该区域内,则计算出自身的延迟转播的时间。同时在该区域内如果收到后面车辆转播的预警信息,则不需要在转发,如没有,则该车转变为转播节点,往后转播信息。
该算法具体实现的步骤如下:
步骤1:事故车辆检测到危险,第一个生成预警信息并开始广播,对非ZOR的车辆则直接丢弃预警信息;
步骤2:在ZOR的区域,第一次接收到发出去的预警事件之后,结合距离对延迟时间进行计算:
(7)
式中,Td表示延迟转播所耗费的时间;TP表示为预警的周期;D表示发送和接收2个节点的距离;Tc表示延迟补偿的时间。对Tc的计算本文采用平均距离(Ad)求出:
Tc=Tp[Ad/(2R)];
(8)
步骤3:如延迟转播时间过期,则表示没有收到后方的预警信息,前车定期广播;
步骤4:节点定期侦听(周期表示为TL)预警信息。侦听过期,没接听到后方预警信息,则表示网络断开,该节点则定期广播预警信息。
最小时延策略设计步骤如图2所示。

图2 最小时延策略设计
通过上述协议,避免在整个危险区域内所有的节点都参与到对预警信息的转播中,一方面减少了预警信息的冗余信息,另一方面作为转播节点不必发送网络帧,使得整个网络的开销变小,提高了网络的性能。
3 数据包格式设计
针对提出的基于时延算法,对其中的数据库格式进行设计。TSD数据包格式设计如下:
Message_type:消息类型;
Danger_vehicle_id:危险行驶方向;
Danger_direction:危险源位置;
Message_vehicle_position:消息节点位置;
timestamp:消息生成时间。
Message_type设置为EWM,节点处理不同类型信息时给予不同优先级。通过(Danger_vehicle_id,Danger_direction)唯一标识一个预警事件,车辆第二次收到来自前方节点的同一预警事件直接丢弃该消息。(Danger_vehicle_id,Danger_direction)定义了ZoR区域,非该区域节点接收到的信息直接丢弃.Message_vehicle_position为消息生成节点位置,ZoR节点第一次收到前方EWM消息后,根据此信息计算与消息生成节点的距离,从而计算延迟转播时间。若节点在延迟转播时间内没有收到来自后方节点的EWM信息,则变成转播节点,周期性地广播预警信息。非转播节点周期性地侦听后方节点消息,若侦听到后方节点预警信息,则通过消息中timestamp信息更新侦听周期。
4 路由仿真与性能分析
本文选择NS-3仿真平台[16],该平台为一款开源、免费的网络模拟工具。在该仿真平台中,用户可采用编写模块的方式对结果进行计算[17]。本系统采用该模块对高速公路场景进行设定,并对路由协议进行设计。
4.1 数据包丢包率仿真结果
对丢包率的仿真选MAP、ETX算法,分别选择高速场景中汽车在10~20m、20~30m、30~40m和40~50m不等的距离,得到MAP算法与ETX的误差比较,如表1所示。
表1 丢包率误差统计
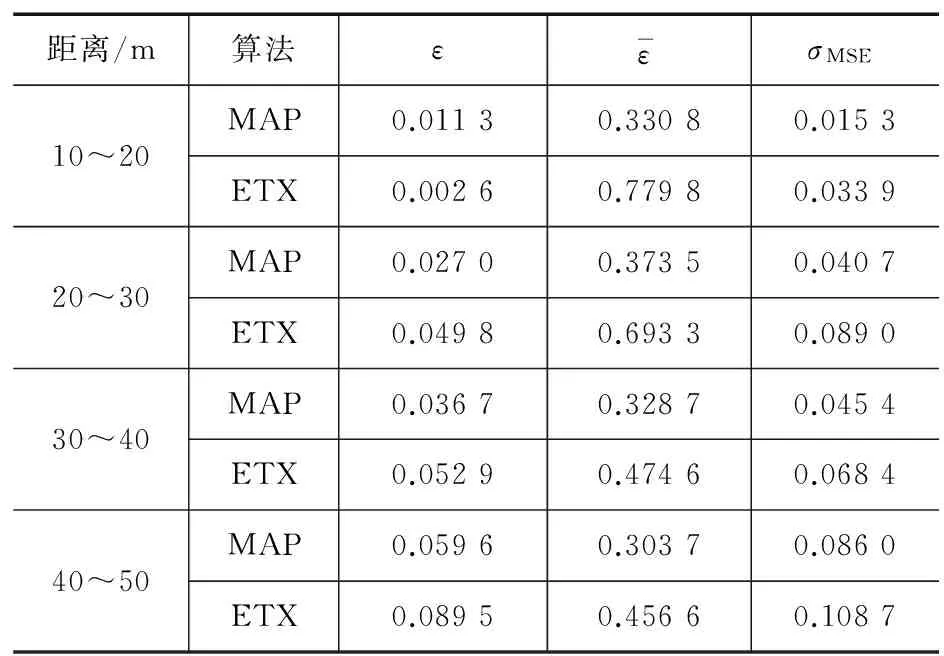
距离/m算法εε-σMSE10~20MAP0.01130.33080.0153ETX0.00260.77980.033920~30MAP0.02700.37350.0407ETX0.04980.69330.089030~40MAP0.03670.32870.0454ETX0.05290.47460.068440~50MAP0.05960.30370.0860ETX0.08950.45660.1087
通过对误差的统计可以看出,改进后的MAP网络算法其误差率要小于传统的ETX算法。
4.2 传输时延仿真结果
选择在车辆平均间距在40~50m条件下,共生车辆设定为50辆。比较该TSD路由协议在不同时延补偿条件下的路由协议指标。其具体的补偿值参数如表2所示。
表2TSD路由协议不同延迟补偿参数

参数Tc/sTp/sR/mTSD0.010.1250TSD-100.1250TSD-20.020.1250
4.2.1 信息传输延迟
作为对VANET网络信息传输质量的重要参考标准,选择从绝对传输延时和相对信息延迟两方面对其评估,同时本文将TSD路由协议与传统的DF路由协议进行比较,得到如表3和表4所示的比较结果。

表3 绝对传输延迟 (s)

表4 相对传输延迟 (s)
4.2.2 转播节点数量
在VANET网络中其转播节点的数量越多,对网络的开销也就越大。在安全预警信息在传输的时候就可能导致信息无法传输。在不同补偿时间下的路由性能,并得出TSD的转播节点数量要明显低于DF算法的转播节点数量,如图3所示。
由仿真结果可以看出,本算法和传统算法相比,可以有效提高网络传输准确率,解决传输延时的问题,可让事故区域车辆及时发现险情。但是上述算法的设计未将网络传输的安全性和链路中断问题考虑进来,对此还需在下一步的研究中进行改进。

图3 正常环境下的转播节点数量
5 结束语
本文针对目前高速公路信息传输中存在的问题,提出了一种行之有效的VANET路由协议,该路由协议是基于对实施丢包率估算和缩短传输时延的研究,提高网络传输的准确性,缩短网络传输时间,从而保障预警系统及时发出预警,最终保障驾驶员及时准确的获取险情信息,减少交通事故的发生率。
[1] 于兵.基于视觉的汽车主动安全关键技术研究[D]. 南京:东南大学,2009.
[2] 张存保,杨晓光,严新平.交通信息对驾驶员选择行为的影响研究[J].交通与计算机,2004(5):31-34.
[3]XUQX,SEGUPTAR,JIANGD,etcl.DesignandAnalysisofHighwaySafetyCommunicationProtocolin5.9GHzDedicatedShortRangeCommunicationSpectrum[C]∥ProceedingsoftheIEEEVehicularTechnologyConference,NewYork,IEEE,2003:2451-2455.
[4]LIF,YUW.RoutinginVehicularandHocNetworks:aSurvey[J].IEEEVehicularTechnologyMagzine,2007,2(2):12-22.
[5]BISWASS,TATCHIKOUR,DIONF.Vehicle-to-VehicleWirelessCommunicationProtocolsforEnhancingHighwayTrafficSafety[J].IEEECommunicationsMagazine,2015,44(1):74-82.
[6]TABLET,SAKHAEEE,JAMALIPOURA,etal.AStableRoutingProtocoltoSupportITSServicesinVANETNetworks[J].IEEETransactionsonVehicularTechnology,2007,56(6):3337-3347.
[7] 韩波.车载AdHoc网络路由协议的研究[D].江门:五邑大学,2009.
[8] 揭志忠,黄传河,韩亚辉,等.VANET中一种分布式路由协议MCCR[J].湖南大学学报(自然科学版),2012,39(11):93-98.
[9] 揭志忠.高速公路环境VANET的高效路由算法研究[D].武汉:武汉大学,2013.
[10] 周连科.基于交通流密度的VANET广播技术研究[D].哈尔滨:哈尔滨工业大学,2011.
[11] 陈振,韩江洪,刘征宇.基于VANET分簇的车辆碰撞警告信息传输[J].电子测量与仪器学报,2013,27(5):396-402.
[12]NZOUONTAJosiane,RAJGURENeeraj,WANGGuiling(Grace),etal.VANETRoutingonCityRoadsUsingReal-timeVehicularTrafficInformation[J].IEEETransactionsonVehicularTechnology,2009,58(7):3609-3626.
[13]KANGKai,WANGCong,LUOTao.FogComputingforVehicularAd-hocNetworks:Paradigms,Scenarios,andIssues[J].TheJournalofChinaUniversitiesofPostsandTelecommunications,2016,23(2):56-65.
[14]BILMESJA.AGentleTutorialoftheEMAlgorithmandItsApplicationtoParameterEstimationforGaussianMixtureandHiddenMarkovModels[M].ICSITR-97-021,DepartmentofElectricalEngineeringandComputingScience,U.C.Berkeley,USA,1998.
[15]SHAGHAGHIErfan,JABBARPOURMohammadReza,NOORRafidahMD,etal.AdaptiveGreenTrafficSignalControllingUsingVehicularCommunication[J].FrontiersofInformationTechnology&ElectronicEngineering,2017,18(3):373-393.
[16]SZ,GUOPF,XUB,etal.QoSEvaluationofVANETRoutingProtocols[J].JournalofNetwork,2013,8(1):132-139.
[17]ARBABIH,WEIGLEMC.HighwayMobilityandVehicularAd-HocNetworkinns-3[C]∥ProceedingsoftheWinterSimulationConference,IEEE,2010:2991-3003.
猜你喜欢
文萃报·周二版(2022年5期)2022-02-18 20:01:47
冰雪运动(2020年5期)2020-03-29 05:08:44
网络安全和信息化(2018年4期)2018-11-09 12:01:54
网络安全和信息化(2018年3期)2018-11-07 03:02:44
天津体育学院学报(2016年3期)2016-12-18 08:24:24
知识产权(2016年8期)2016-12-01 07:01:23
中国新通信(2014年11期)2014-09-11 19:27:52
电测与仪表(2014年16期)2014-04-22 05:20:30
计算机工程(2014年6期)2014-02-28 01:25:54
河南科技(2014年5期)2014-02-27 14:08:56