
基于Bagging算法霉烟叶自动识别系统开发
2018-01-29 07:46汤龙
西安文理学院学报(自然科学版) 2018年1期
汤 龙
(文山学院 教务处,云南 文山 663000)
香烟的生产与消费为我国社会发展及民生建设提供了一定的资金保障,同时也是我国市场占据销量榜首的大众化商品.烟叶作为其生产的主要原料,其质量决定了产品的质量以及消费者的直接感官[1].为此,国内学者针对烟叶质量方面进行了广泛的研究.一方面从仓储工艺入手,提高烟叶的仓储水平;另一方面则从不良检测入手,对病害烟叶进行自动化剔除.从现有的研究结果来看,自动化检验设备与系统的研发成为了学术界的热点问题,而基于不同算法的识别体系更是成为了主要的研究方向.
Bagging算法是一种“不稳定”分类算法模式,与网络神经算法配合形成对单一指标的习得方差校正体系[2].通过此体系能够有效的利用有限的单元形成评价模型参数标准,并在后续有效评价与区分的过程中进行修订.逐步提升判断的准确性.另一方面此种算法依托于扫描图像的色差分析,在相同原理下还能够对其他检测指标进行辅助判断,形成一次开发,多次利用的集约模式.
1 基于Bagging算法的霉烟叶检测系统开发
1.1 霉烟叶特征分析
分析霉烟叶的特点可知,当烟叶发霉后会产生两种显著的形状,其一是易于成团结块,色泽成暗褐色;其二则是烟叶表面呈现出显著的白色霉点或霉斑,且霉点或霉斑呈现出一定的聚集分布特征[3](如图1).
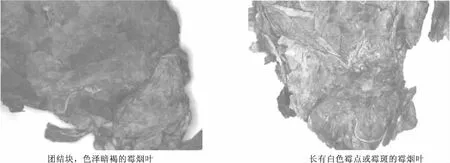
图1 霉烟叶表面特征
由图1中可以明显看出,当烟叶发霉后其表面色泽会产生显著的变化.此种变化通过电子扫描的方式能够转变为具有色差的数据信号,其中暗褐色与白色霉点(斑)均与正常色泽存在明显的差异,这就为利用设定色差阙值来分析烟叶发霉情况提供了依据,也为本系统的开发提供了最为基本的原理支撑.
1.2 检测原理及颜色空间选择
在利用自动扫描装置(传动自动扫描仪)能够获得待检烟叶图像,图像的不同像素均可以利用三原色代码的方式转变为数据讯号.同时,利用机器学习方法,建立离线提取霉烟叶的典型特征训练有效的分类器,并应用学习好的分类器对烟叶区域进行识别与检测[4].然而,如何选择合理的颜色空间成为了本系统设置的重点,为了进一步增加系统的可靠性以及颜色区间对比方式选择的合理性.在实际的研究过程中分别使用了RGB、HSV、YCrCb,C1C2C3,rgb五种颜色空间模式,总计15种颜色通径对两种不同特征霉烟叶进行分析(如图2、图3),其结果如下:
从图2中可见,B、H和C3通道相比其他通道对霉变点的鉴别效能相对较高;而从图3中则可以看出针对白色霉点(斑)霉烟叶的分析效果则为B、S、C1通道相比较好.从上述结果中不难看出,两种霉烟叶特征的差异决定了其缺乏有效的统一颜色空间通道(仅B通道一种相同,不满足高精度判断要求).故而,为了达到稳定的鉴别霉变点,单靠颜色的单一因素很难进行有效区分.
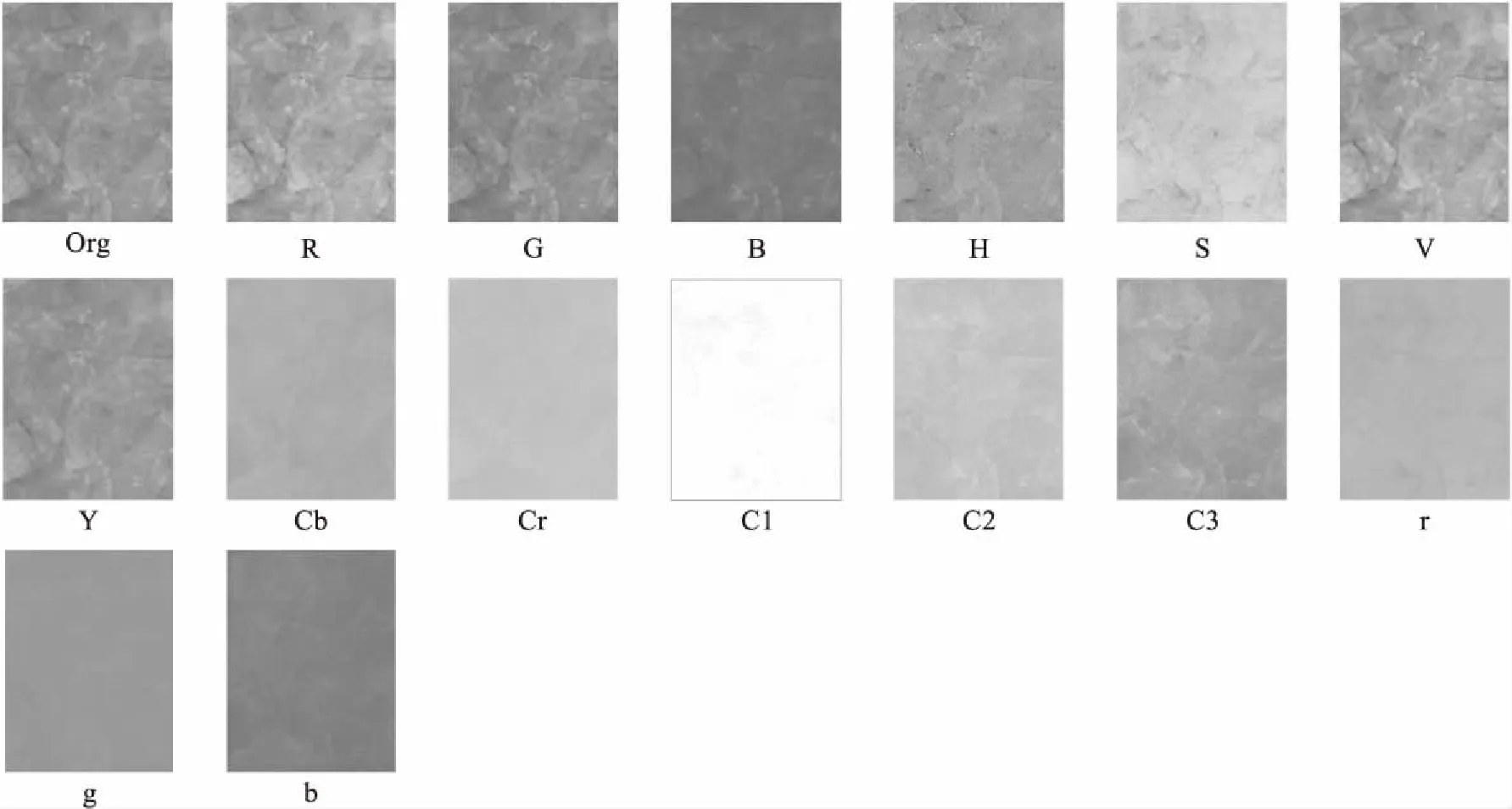
图2 五种颜色空间模式分析暗褐色霉烟叶结果图

图3 五种颜色空间模式分析白色霉点(斑)霉烟叶结果图
1.3 纹理信息提取设计
从上文的分析中我们发现单一的利用颜色空间很难有效的对两种霉烟叶进行有效分析.故而在实际的系统设计过程中需要整合纹理提取与分析子系统.在该系统的设计过程中,结合局部纹理信息,经过试验认为选用微结构描述算子(Micro-structure descriptor MSD)是一种有效的方式[5].该算子的提取步骤与环节主要如下:
首先,对于一幅RGB彩色图像,先将其变换到HSV空间,再分别对H、S、V三个通道采用8、3、3个等级量化.共得到8×3×3=72种颜色.
其次,将HSV从柱面坐标系变换到迪卡尔坐标系,转变规则遵循式(1).

(1)

(2)
通过上述计算能够将具体的纹理信息以多维度、多等级的角度区间来进行表征.
最后,通过角度区间的分类描述可以对其微结构加以判断,具体的判断方式是以利用角度区间形成合理的72维向量式(3).
寻找微结构,建立微结构描述(72维向量)
(3)
其中w0=wi,i∈{1,2,…,8}通过上述三个环节可以将颜色空间以及微结构描述进行有机的整合,通过二者共同作用实现对霉烟叶的有效甄别[6].
1.4 分类器设计及其Bagging算法实现
选用基于Boosting修剪Bagging的选择性集成算法,该算法利用Bagging方法生成多个个体学习器,通过Boosting方法进行选择性集成,既能兼顾Bagging算法的抗噪性,又能保持Boosting算法的学习性能,同时利用选择性集成提升了学习算法泛化能力的优点,具体算法过程描述如下:
步骤2:利用Bagging算法训练T个个体学习器;
Fort=1…T
从L随机采N个样本构成训练集Lt;
利用Lt训练个体学习器Ct;
将Ct放入学习器集合C
End
将所有样本的权重设置为1/N;
步骤3:Foru=1…U
A:从C中选择分类误差最小的个体学习器Du;
IfDu的分类误差eu>0.5,
将所有样本的权重设置为1/N;
GoTo A;
End
步骤4:将Du放入集合D;
步骤5:Fori=1…N
IfDu(xi)≠yi
wi=wi/2eu
Else
wi=wi/2(1-eu)
End
End (5)
End (3)
在上述的环节分析与实现过程中,步骤1和步骤2为用来生成个体学习器;步骤3到步骤5是利用Boosting方法进行选择性集成,其学习特性的由来以及具体的分析指标确定正是从该步骤中得来的[7];步骤6利用选择得到的个体学习器组成强学习器进行分类,其分类结果由所有被选出的个体学习器的输出投票获得.
2 霉烟叶自动检测系统运行效果分析
2.1 实验过程
步骤1:收集典型霉烟样本图像和好烟叶图像各100幅(暗褐霉烟叶,白色霉点霉烟叶各50幅),计算所有图象的MSN描述并存储在数据库中,供系统进行学习;
步骤2:对待检测图像1 000幅(其中暗褐霉烟叶,白色霉点霉烟叶各250幅,正常烟叶500幅),按合适的大小对其进行有重叠的分块,分成若干个子图像,对每个子图像同样提取MSD描述,并利用分类器进行识别,当识别成霉烟的子图像数大于一定阈值,如占所有子图像总个数的比例,则认为该图像中包含霉烟.
2.2 实验结果
按照上述原理编制算法原理验证程序,进而使用该程序对烟叶图像库中所有霉烟叶与合格烟叶图像进行识别.同时,为了进一步检验该系统的有效性,本文分别统计了不同图像采集像素、不同霉烟叶样本的识别时间与识别精确度,其结果见表1.

表1 霉烟叶自动检测系统检测准确率统计表
由表1发现,在使用了分辨率为70×70大小的训练图像的基础上,分别对50×50、70×70、90×90的测试图像进行检测,并根据不同的霉烟叶外部特征进行分类统计发现:
(1)随着待检图像分辨率的提升,检测时间随之提升,自90×90分辨率时其检测时间约为0.5 s,已经无法满足检测线自动检测的频次需求.故而其流水分辨率应该控制在90×90以下.
(2)霉烟叶自动检测系统针对白霉点(斑)烟叶的检测效果更为显著,其综合准确率为99.72%,相比于暗褐色霉烟叶提高了约0.3%.
(3)分辨率的提升决定了检测的准确性.在50×50模式下,其准确率均值为98.76%,而到了90×90分辨率条件下则准确率则可以提升到100%.
2.3 实验结论
通过本实验研究,该系统能够有效的识别霉烟叶,其识别的综合准确率为99.57%.在实际的生产过程中,结合检出时间与检出准确性的综合考量推荐使用70×70分辨率来进行.
[1] 曹杰,邵笑笑.基于信息增益和Bagging集成学习算法的个人信用评估模型研究[J].数学的实践与认识,2016(8):90-98.
[2] 李海杰.基于机器视觉的烟草异物检测和烟叶分类分级方法研究[D].南京:南京航空航天大学,2016.
[3] 孙茂伟,杨慧中.基于改进Bagging算法的高斯过程集成软测量建模[J].化工学报,2016(4):1386-1391.
[4] 邵素琳.基于机器视觉的烟叶梗茎检测与烟叶类型识别方法研究[D].南京:南京理工大学,2013.
[5] 史龙飞,宋朝鹏,贺帆,等.基于机器视觉技术的烤烟鲜烟叶成熟度检测[J].湖南农业大学学报(自然科学版),2014(4):446-450.
[6] 李雅芹,杨慧中.一种基于Bagging算法的高斯过程集成建模方法[J].东南大学学报(自然科学版),2011(S1):93-96.
[7] 张晨光.烟叶叶片结构在线检测系统的设计及研究[D].昆明:昆明理工大学,2015.
猜你喜欢
活力(2019年15期)2019-09-25
数学物理学报(2019年3期)2019-07-23
家庭影院技术(2018年9期)2018-11-02
制造技术与机床(2017年7期)2018-01-19
现代园艺(2017年23期)2018-01-18
自动化学报(2017年5期)2017-05-14
少儿科学周刊·儿童版(2015年11期)2015-12-17
天津造纸(2015年2期)2015-01-04
作物研究(2014年6期)2014-03-01
