
无配重欠驱动输电线路巡检机器人结构设计研究
2018-01-26 04:58:21北京联合大学乐海丰张利霞孙力红
电子世界 2018年1期
北京联合大学 乐海丰 张利霞 孙力红
1.采用力学方法进行机器人的结构设计
机器人的结构设计采用仿长臂猿的双臂结构,每条手臂设计了4个回转关节和1 个旋转关节,分别是肩关节、肘关节、和腕关节、指关节以及水平旋转关节,并在腕关节与箱体的两端之间引入了一条柔索7。机器人越障过程中,肩关节、肘关节和腕关节用于调节手臂的姿态,并定位行走轮的位置。指关节可以实现行走机构的快速搭线和脱线;还为机器人在做翻转、越障运动时,在动势能转化中减少损耗提供保障。水平旋转关节用于调节行走轮的姿态,绕开障碍物。柔索主要用于承受机器人的重量,调整它的长度可以机器人的质心位置。机器人通过两条手臂上的柔索长度以及各关节的协调运动实现机器人的越障功能。
在传统机器人基础上,减少配重系统,机器人的结构大大简化,由两个机器臂和机体组成。机器人的结构如图1所示。图中各参数意义如下:Pi为腱张力;mi为臂部各段重量,li为臂部各段长度;Ji为臂部各段转动惯量;di为各关节到该部重心的距离;θi为结构角度,此处i=1,2,3。
无配重欠驱动机器人结构简图如图2所示。图中各参数意义如下:Pi为腱张力;mi为臂部各段重量,li为臂部各段长度;Ji为臂部各段转动惯量;di为各关节到该部重心的距离;θi为结构角度,此处i=1,2,3。
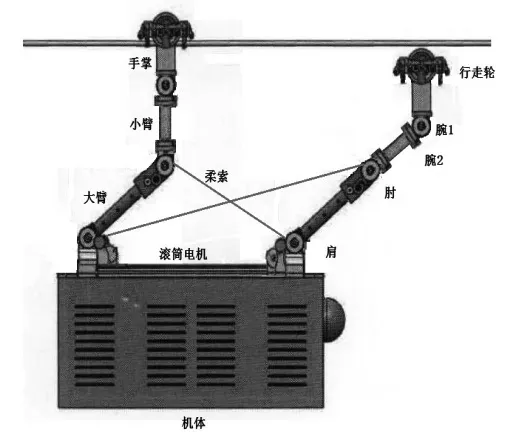
图1 机器人模型图
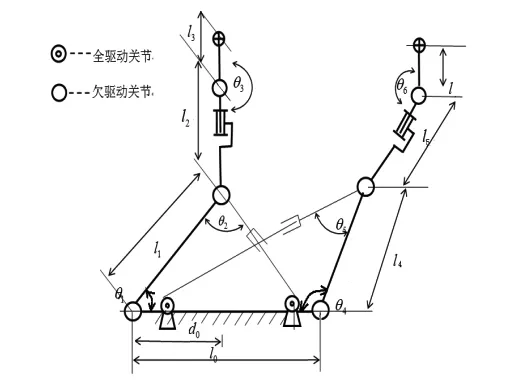
图2 机器人结构简图
现有的大多数电缆巡检机器人为了保证机体平衡,是通过在机体处添加可改变质心位置的配重实现的。在实现搭线和脱线运动中,类似于被提起一个螯的螃蟹,这种设计使机器臂的仿生性降低。而本设计的欠驱动机器臂,两臂之间相互配合,一个机器臂承担全身重量时,另一个机器臂不只完成搭线等任务,还承担机体平衡的校正任务,由此可以减少机器人的配重机构,也提高了机器人的仿生性。
2.欠驱动机器人的越障构态
无配重欠驱动机器人在不同的运动环节,依靠关节弹簧和机械限位机构,形成它专门的结构状态(简称构态),完成机器人的特有运动。下面通过机器人的自然构态、行走构态、转身构态、脱线构态和搭线构态分别说明:
机器人的自然构态,是指机器人在没有外界约束的情况下依靠自身弹性元件复位的结构状态。如图3(A)所示。在弹簧和限位装置的共同作用下,两个机器臂的大臂与水平面成γ角,腕部与水平面成δ角。目的是在滚筒电机回收腱时,防止大臂与机体平行而出现肩关节卡死现象;腕部在搭线脱线时叠加肩关节、肘关节的弯曲角度,可以接近竖直,方便行走机构搭线脱线。
机器人的行走构态,如图3(B)所示,机器人双臂在重力的作用下,肩、肘、腕各个关节的弹簧受到压缩(拉伸),双臂成竖直状态。
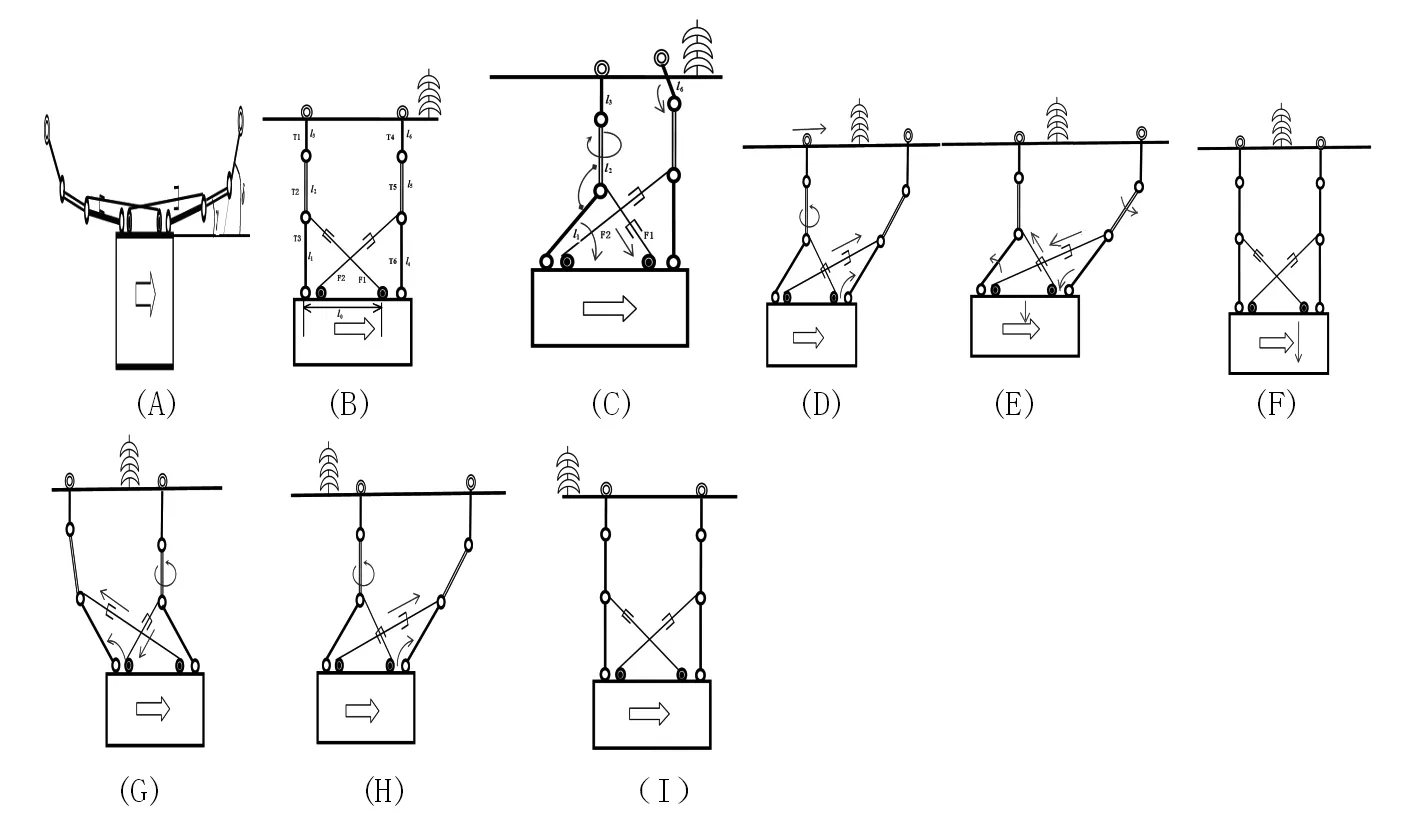
图3 机器人的越障机理构态组图
脱线构态;开始越障时,如图3(C)所示,后臂滚筒电机转动使腱p1收回,腱带动大臂l1回转,大臂压缩肩关节向内弯转。此时与之相连接的小臂l2受机体等物的重力约束,向下垂直,使得肘关节向外弯转。机体逐渐水平移至小臂的正下方,机体位移也逐渐上升。由于机体的上升,前臂逐渐失去承担机体重量的功能,同时也失去了重力的约束,但在腱F2的约束下,依旧呈竖直状态,当其行走机构高于电缆时,前臂的行走机构不受下面的电缆约束,就轻松地实现脱线工作了。
转身与回身构态,如图3(D)所示,转身构态是前臂完成脱线工序后,后臂水平关节向外旋转,带动整个身体转动。转身角度可根据障碍物的形状和大小而定,最大为90度。当前面的障碍物较大时机器臂后面的行走机构继续前进,行至后臂靠近障碍物时,调整机器人的自平衡构态。回身构态是转身构态的复位工作,区别是后臂水平关节向内旋转,后面的行走机构到达电缆的正上方,继续后续的搭线过程。
自平衡构态,搭线构态,如图3(E)所示,当行走机构处于电缆的正上方时,该滚筒电机转动,使得腱逐渐收紧,行走机构和机体受腱牵引,之间的距离变小,最终行走机构完全落在电缆之上,逐渐承担机体的重量,完成前臂的搭线过程。
上述构态仅完成了一个臂的越障,后臂和前臂进行动作互换,就可以完成整个越障过程了。越障时的构态如图3(F)、(G)、(H)和(I)所示。
3.结束语
通过研究,本文设计的机器人,不需要配重的情况下平稳的调整机器人身姿。机器人的一个机器臂调整身姿,另一个机器臂做搭线或脱线的预备动作,达到快捷性。通过机器人的越障机理构态组图,表明该机器人能在无配重系统的情况下,保持了机体基本平衡;利用欠驱动控制实现了机器人的平稳越障;达到了减轻机器人自重的目的。
猜你喜欢
临床骨科杂志(2023年3期)2023-08-11 01:22:33
环球时报(2022-07-13)2022-07-13 17:18:39
环球时报(2022-03-14)2022-03-14 18:19:44
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
电影(2018年8期)2018-09-21 08:00:06
中华肩肘外科电子杂志(2016年2期)2016-01-23 20:04:02
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53
中华肩肘外科电子杂志(2015年2期)2015-01-22 05:33:27
