
双闭环PI控制Boost PFC电路的仿真研究
2018-01-26 04:58安徽理工大学电气与信息工程学院马晓露薛亚彬
电子世界 2018年1期
安徽理工大学电气与信息工程学院 马晓露 薛亚彬
0 引言
开关电源的广泛应用给电网带来了输入侧的波形畸变、功率因数降低等问题。提高功率因数,进行谐波抑制,从而改善电能质量,为现阶段研究的热点和重点,功率因数校正(PFC)电路得到了较多的应用。近年来,很多科研机构以及电源企业对升压型功率因数校正(Boost PFC)电路进行了大量研究,并应用在实际电源设计中[1]。几乎全部的升压型(Boost)功率因数校正控制方法大致都涉及到双环控制,即电压环、电流环[2]。本文通过Matlab Simulink软件,进行了双闭环PI控制Boost PFC电路仿真模型的搭建与仿真实验研究,对实现实际电路有着很好的参考价值。
1 拓扑电路和控制方法选择
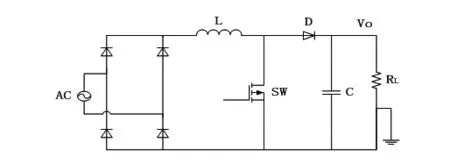
图1 Boost PFC电路结构
在实际PFC电路设计中,需要完成电压的转换,使输入电流跟踪全波整流电流,直流电压输出稳定[3]。本文PFC电路采用Boost拓扑结构,图1为Boost PFC电路结构。由二极管、功率开关管、电感和电容等构成PFC主电路,电流iL通过二极管D续流。
PFC控制电路需确保电压输出稳定以及输入电压、电流达到同一相位。电路采取电压、电流双闭环控制方式,图2为电压环、电流环双闭环控制系统原理框图。电压环采取定值方式进行控制,从而达到跟踪误差的目的,电压控制器采用PI控制器。电流环输出脉冲信号控制功率开关管,让输入电流跟踪输入电压,电流信号和输入侧的电压采样信号达到同相位,电流控制器也采用PI控制器。电流环给定值是输入电压的采样和电压环的输出两者的乘积,可使电流环的输出电流和输入电压同相。
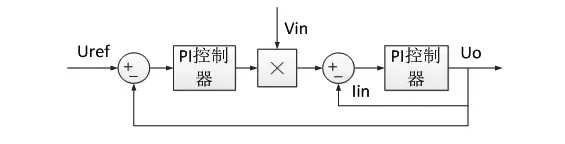
图2 电压、电流双闭环控制原理框图
2 电流环、电压环PI控制器
PFC性能的好坏关键在于对控制电路中PI控制参数等的设置。对于电流环PI控制器的确定,需要分析Boost PFC控制电路电流环的传递函数数学模型[4]。图3为电流环结构控制框图。
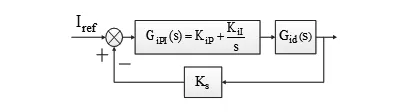
图3 电流环PI控制器
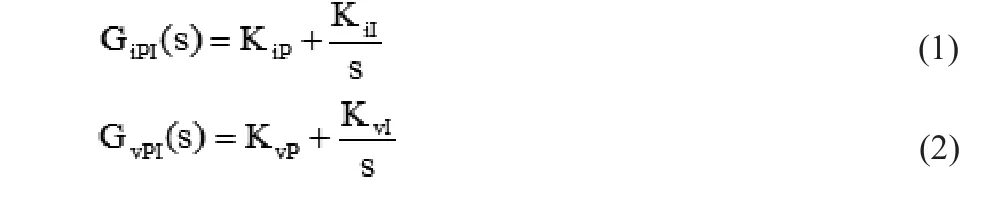
KiP、KiI为电流环PI控制器的控制参数,KvP、KvI为电压环PI控制器的控制参数。电流环、电压环PI控制器传递函数分别为:
3 电路仿真结果分析
图4为运用MATLAB软件搭建的Simulink仿真模型。系统输入交流电源AC 220V,输出电压为310V,设置系统仿真运行0.5s。图5为交流电源电压Vac和电流Iac的波形,可见系统运行过程中,在0.1s以后,输入电流和输入电压的波形同相。
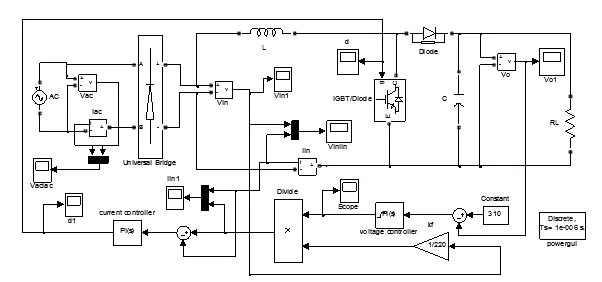
图4 电路仿真模型
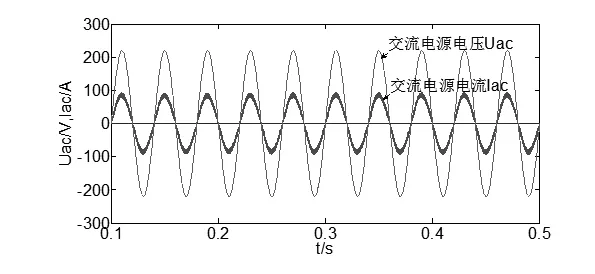
图5 交流电源电压、电流波形
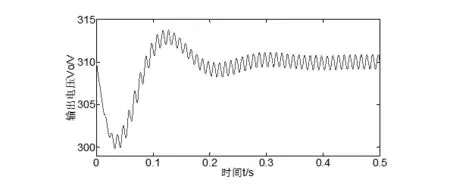
图6 输出电压Vo波形
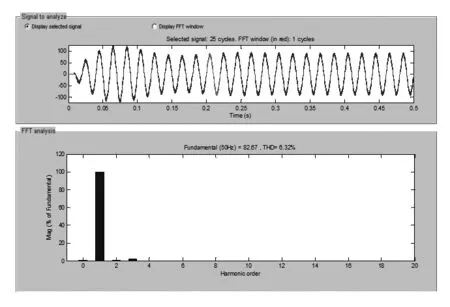
图7 输入电流谐波含量图
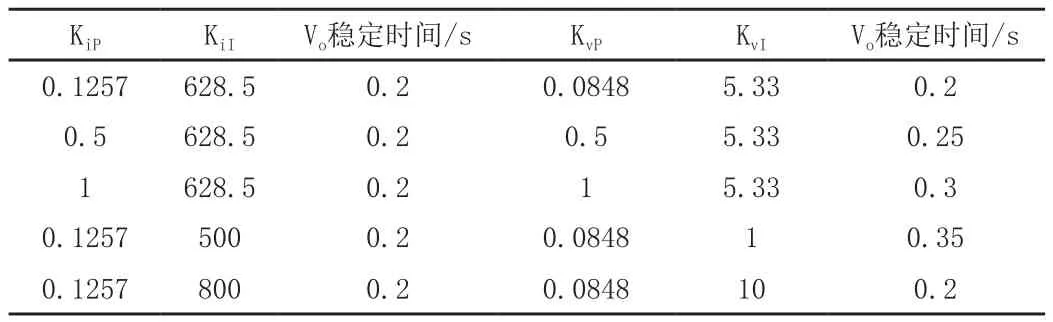
表1 电流环、电压环参数与Vo稳定时间关系
图6为BOOST电路的输出电压Vo波形,可见Vo在较短的时间后,稳定在了310V附近。图7为输入电流进行FFT分析,所得的输入电流谐波含量图,输入电流的基波分量最大,测得THD=6.32%。行,表1为对示波器显示的Vo波形进行观测所得的输出电压Vo达到稳定所需的大致时间。通过比较可知,当设置合适的电流环、电压环PI控制器的控制参数时,可使系统具有较快的响应速度和良好的PFC性能。
4 结束语
本文进行了双闭环PI控制Boost PFC电路的仿真研究。由系统的仿真运行结果分析可得,通过合理选择PI控制参数,可使系统拥有较快的响应速度,功率因数校正后系统的电流、电压同相,功率因数接近于1,输出电压很快达到稳定值,响应迅速,但在310V附近存在一定的纹波。同时THD值只有6.32%,输入电流的谐波抑制效果较好,对研究Boost PFC电路的双闭环PI控制有着较好的参考价值。
[1]杨存祥,何康,金楠,冯雪.一种新型PFC 的控制仿真研究[J].电源技术,2015,39(3):586-587.
[2]张艳杰.升压型双闭环控制有源功率因数校正电路设计[J].电气技术,2016(9):43-46.
[3]王智,方炜,刘晓东.数字控制的单周期PFC 整流器的设计与分析[J].中国电机工程学报,2014,34(21):3423-3431.
[4]石诚,王君艳.基于Matlab Simulink的无桥PFC变换器的仿真[J].通信电源技术,2014,31(2):24-27.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
飞控与探测(2022年6期)2022-03-20
力学学报(2020年4期)2020-08-11
测控技术(2018年1期)2018-11-25
测控技术(2018年9期)2018-11-25
电子制作(2018年11期)2018-08-04
黑龙江电力(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
通信电源技术(2016年5期)2016-03-22
电测与仪表(2015年3期)2015-04-09
