
安防雷达的总体设计与实现
2018-01-26 04:58安徽博微长安电子有限公司
电子世界 2018年1期
安徽博微长安电子有限公司 王 彬
0 引言
随着技术日新月异,传统视频监控系统已无法满足要地及要害部门的安全防卫工作,安防雷达可根据物体在探测区域的微波变化,获取物体类别与距离等信息,实现对防护区域高可靠预警[1]。
1 安防雷达技术体制
调频连续波雷达具有高距离分辨率,低功耗、无盲区、抗干扰能力强等特点。常用的调频方式主要有二种:LFMCW体制,FSK体制[2]。FSK体制难以多目标检测,安防雷达系统中,采用LFMCW体制较多。
本雷达设计采用三角波的形式。图1给出了三角形线性调频波形示意图。目标回波与雷达发射波的形状相同,只是在时间上有一个△t的延时,因此雷达混频器输出的差拍信号是包含目标信息[4]。
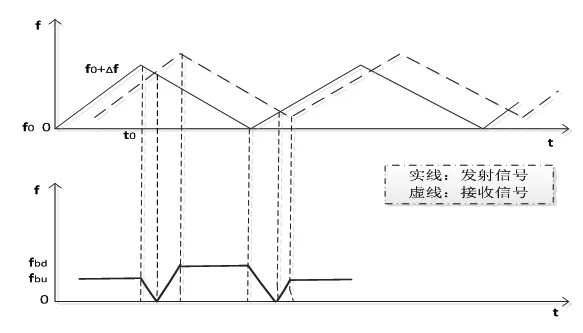
图1 调频波形示意图
差拍频率确定为:
差拍频率与距离和速度的关系确定为:

2 安防雷达总体设计
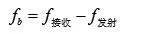
系统的整体方案设计图2所示。
雷达由射频前端模块、信号调理模块和数字信号处理模块组成。射频前端向外发射探测波形,雷达的回波信号输出至信号调理模块做预处理以及AD变换,然后送到信号处理模块,经处理后提取出目标距离、速度、角度信息。
图2 安防雷达整体方案设计
信号调理模块主要功能完成射频前端模块的功能设置及中频信号的调理,可实现对雷达发射功率,发射带宽,调制波形的产生、及接收中频增益等进行控制。中频信号预处理对泄露三角调制频率的抑制、高频噪声的滤除、信号放大、AD转换等。
信号处理模块主要负责模数转换之后的数字中频信号进行相应的处理来提取出被探测目标的距离、速度和方位角等信息。主要包括波形矫正、FIR滤波、FFT及主频检测、综合运算等。
2.1 射频前端
射频前端集成了雷达发射和接收天线、信号通道、压控振荡器(VCO) 、低噪放大器(LNA)、 混频器和中频放大器等,雷达前端采用单发双收设计,雷达除了测距测速之外,还具有测角功能,能够测出目标与天线前端法线之间的夹角,从而准确的得出目标的位置信息,其原理框图如图3所示:
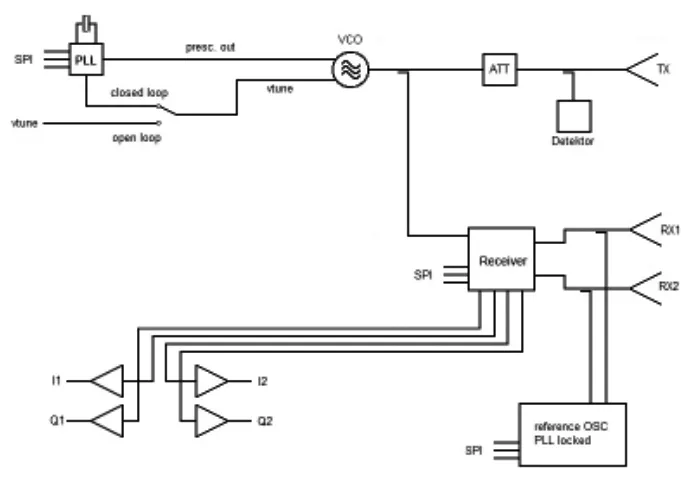
图3 雷达前端内部原理框图
2.2 调制三角波信号产生
本系统采用三角波信号作为雷达的调制信号,射频前端内部集成ADF4158芯片锁相芯片,通过逻辑控制芯片配置ADF4158参数,产生某固定频率固定幅度的三角波。ADF4158工作原理如图4所示:
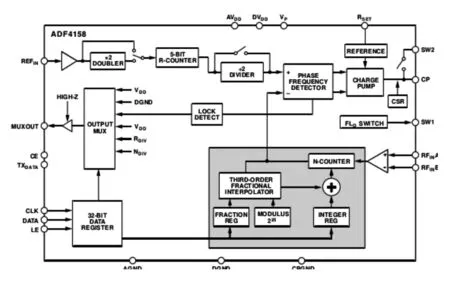
图4 ADF4158功能框图
2.3 滤波放大模块方案设计
本系统滤波放大电路主要设计思想:(1)解决射频前端调频三角波的发射泄露;(2)对目标回波信号进行放大。滤波放大电路原理如图5所示。 电路根据目标信号和发射泄露信号不同频率进行相应的滤波和放大[5]。
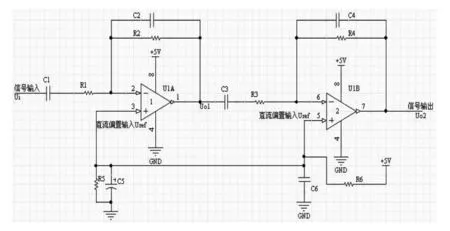
图5 滤波放大电路设计
滤波电路设有可调数字电位器,可根据目标位置,来调整回波信号幅度增益,即在远距离目标信号较小时,增加信号增益,提高信号强度;近距离是信号较大时,信号增益减少,避免信号太强导致模/数转换器溢出。
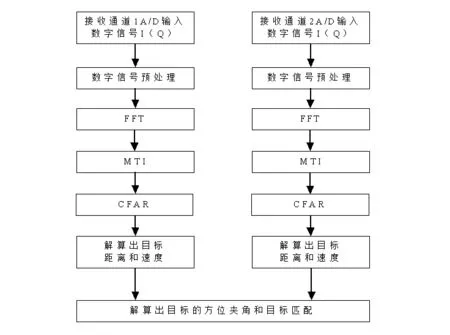
图6 信号处理流程图
3 软件部分的设计
本设计采取DSP+FPGA做处理器[6],采用FPGA做所有外设的接口,所有的DSP与外设之间都经过FPGA。FPGA的时序控制能力强,可以精确的控制时钟输出输入,将读取到的数据进行预处理之后,送给DSP进行处理,DSP信号处理流程入图6所示。
在初始化阶段,FPGA和DSP会读取存储在非易失器件中的程序和数据,加载到芯片中并运行。系统运行的FIFO由FPGA生成,集成在FPGA中,不需要外部器件支持,简化电路,节约成本。
在显示软件方面,开发了一个基于MFC的人机交互界面,该界面采用雷达与视频联动技术,便于用户操作和观察。软件界面如图7所示。
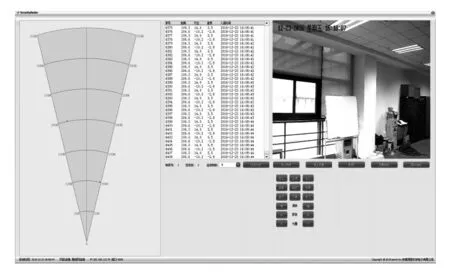
图7 界面截图
4 实验数据
对100米以内的目标进行测试,测试条件:带宽200M,调制频率200Hz,选取在较开阔处,杂波较小,测试目标1~3个。目标距离信息通过一部红外测距仪获得。外场测试采集数据由FPGA通过控制A/D采样中频输入给基带信号得到, 利用采集的数据,在MATLAB经算法仿真后得到目标信息截图如图8所示。
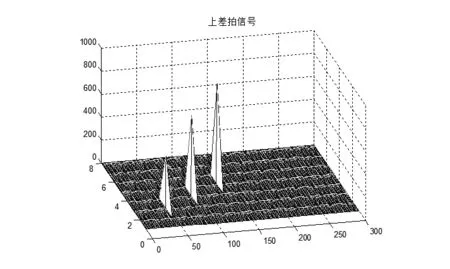
图8 目标信息截图

表1 测试与测距的误差分析
从表1可以看出,本项目设计的安防雷达,无论是在稳定性,还是实用性上,都有较大的优势,可投入安防监控应用。
[1]吴昭.安防雷达信号处理的设计与实现[D].硕士论文:南京理工大学,2015:03-23.
[2]丁鹭飞,耿富录,陈建春.雷达原理[M].北京:电子工业出版社,2009:273-276.
[3]黄文奎,刘文超,等.FSK体制汽车避碰雷达的数据采集系统[J].微电子学于计算机,2005,22(10):165.
[4]杨帆.LFMCW雷达信号处理算法研究及实现[D].硕士论文:西安电子科技大学,2007:23-31.
[5]吴鹏飞.基于双通道射频前端的汽车辅助雷达设计与实现[D].硕士论文,2013,12.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
能源工程(2021年5期)2021-11-20
军民两用技术与产品(2021年12期)2021-03-09
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
电子制作(2016年1期)2016-11-07
腹腔镜外科杂志(2016年9期)2016-06-01
西部广播电视(2015年9期)2016-01-18
