
基于ARM的仿人形机器人的设计
2018-01-26 04:58湖南铁道职业技术学院
电子世界 2018年1期
湖南铁道职业技术学院 王 勇
中车株洲电力机车有限公司 王梨英
0 引言
机器人技术和机器视觉的发展,让智能机器人技术成为了当前社会研究的热点,同时,嵌入式技术的深入发展为智能机器人技术的研究提供了强大的硬件平台支持,嵌入式系统可靠性高,功耗低等性能非常适合机器人系统。基于此,本文对仿人形机器人进行了软硬件的设计,初步完成了一款仿人形机器人的设计,该系统中同样搭载了机器识别功能,能识别运动路径中的障碍物,并实现报警。
1 系统设计
根据系统的整体要求,系统的硬件设计主要分为三大部分:机器人的基本运动控制模块、图像处理与物体识别模块、传感器模块。其硬件框图如图1所示。
其工作原理是:系统通过摄像头模块进行图像处理与物体识别,因为本系统的主控芯片主频不高,因此在处理过程中采用灰度处理的方法进行了处理,此外,由三个单轴陀螺仪与一个加速度传感器实时采集机器人运动状态,其中传感器的安装,根据检测到物体的位置情况,进行最优化的调制,最后根据采集到的数据,经主控芯片进行稳定性和精度测试,使设计的机器人在运动过程中的步态动作精确到位。
2 系统硬件设计
2.1 主控电路
本设计采用LM3S1138为主控芯片,构成的主控电路如图2所示。
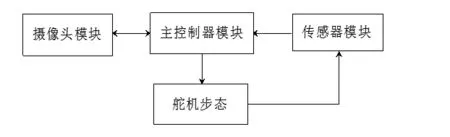
图1 系统硬件框图
2.2 舵机模块设计
舵机模块在设计时,主要考虑对应的旋转角度是否可以满足机器人主要关节的灵活度,同时还需要兼顾测量的准确度,经过分析,本设计中采用纯数字式SR40系列舵机,这种舵机控制简单,可以直接由MCU进行控制,且控制精度高。
2.3 摄像头模块设计
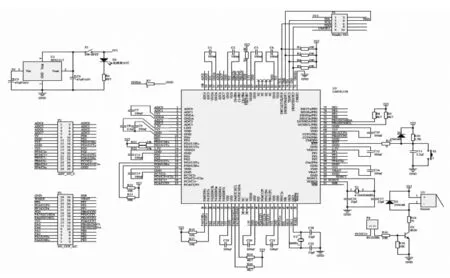
图2 主控电路原理图
系统通过摄像头模块进行图像处理与物体识别,因为本系统的主控芯片主频不高,因此在处理过程中采用灰度处理的方法进行了处理,本设计中采用 “OV6620 单片CMOS CIF 彩色数字摄像头”做灰度图像处理,这种摄像头虽然功耗比较法,取点的个数比较少,但是价格便宜,程序设计可以直接参考,设计可以满足设计要求。
2.4 传感器模块设计
本设计采用MMA845XMMA8452Q,它是一款 12 位分辨率的智能低功耗、三轴、电容式微机械加速度传感器。以为具有多个中断接口,可以节省整体功耗,而且对于处理器的数据处理减去了负担。另外还采用了ENC-03角速度传感器,它是一款模拟传感器,输出的信号是与角速度成正比的模拟信号,然后通过AD转换后及可以得到与角速度成正比的数字信号,具有响应速度快的优点。
3 系统软件设计
算法设计与算法流程图如图3所示:
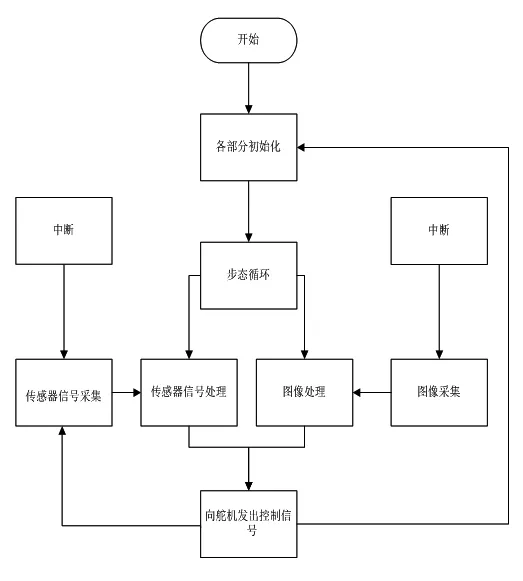
图3 算法主流程图
图像处理模块流程图如图4所示:
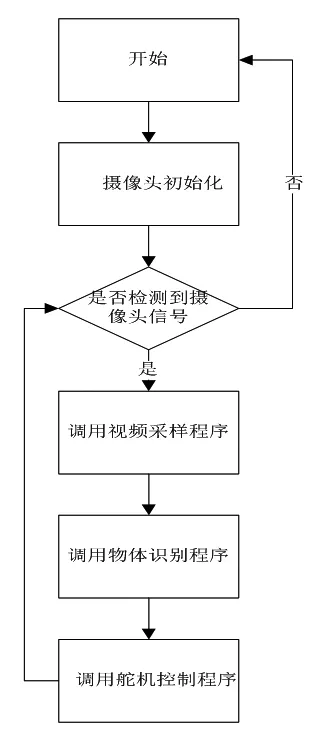
图4 图像处理模块流程图
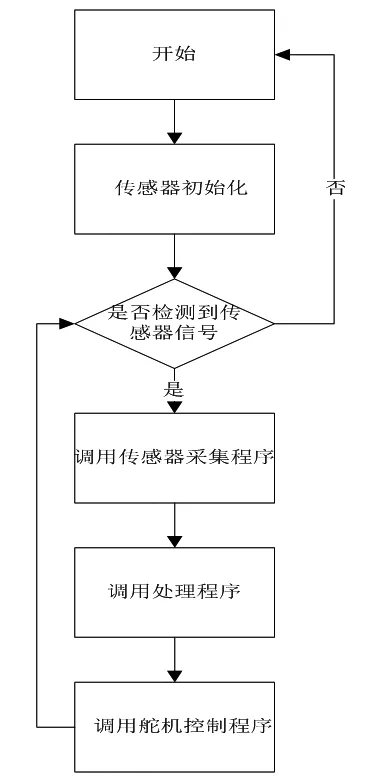
图5 传感器模块的程序流程图
传感器模块的程序流程图如图5所示。
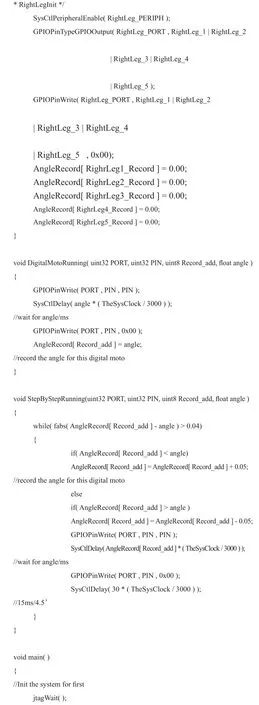
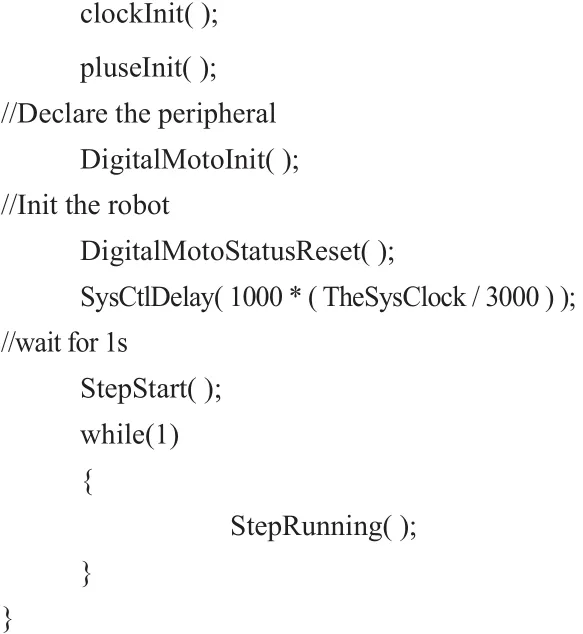
其主要程序代码如下:
4 结论
本论文经过对仿人形的机器人的分析研究与设计,通过对其硬件和软件的设计,通过CAD设计其结构,完成了一款仿人形机器人的设计,经过实验表明,该仿人形机器人能够完成简单的人形移动,具备视觉识别系统,可对障碍物进行识别,达到设计的功能要求,结果可行。
[1]戚开诚,张建军,刘伟,高峰.仿人机器人仰卧——直立构态变化分析[J].机械设计,2013,6(30):37-39.
[2]吴仲雪,韦金玲,金凤,等.仿人形机器人[J].电子世界,2017,4:168-170.
[3]倪靖猛,方宇,邢岩,等.基于优化负载电流前馈控制的400HZ三相PWM航空整流器[J].电工技术学报,2011,26(02):141-146.
[4]宫金良,张彦斐,高峰.机器人末端运动特征描述方法[J].机械设计,2006,23(11):16-18.
[5]高峰,杨加伦,葛巧德.并联机器人型综合的GF集理论[M].北京:科学出版社,2011:7-30.
[6]宗鹏程.基于NAO机器人的视觉目标检测与跟踪[D].华北电力大学硕士学位论文,2015.
猜你喜欢
鸭绿江·华夏诗歌(2021年7期)2021-09-13
小学科学(学生版)(2019年7期)2019-08-01
自动化学报(2019年6期)2019-07-23
疯狂英语·爱英语(2018年12期)2018-08-13
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
舰船科学技术(2015年8期)2015-02-27
小学生时代(2015年5期)2015-01-20
