基于方波高频信号注入的PMSM无传感器控制
2018-01-24 11:56马媛媛
中国设备工程 2018年1期
马媛媛
(青岛酒店管理职业技术学院,山东 青岛 266100)
永磁同步电机(PMSM)在构造、稳定性和效率很多方面优势明显,但定向磁场的方式往往是通过在电动机转轴上安装一个传感器,提高系统的成本同时,尤其还影响了系统的稳定性、可靠性和维护性。基于此,本文提出的方案旨在实现PMSM的无传感器控制。
永磁同步电机先前的无传感器控制其转子角度估算的方法主要有两种:一种是基于反电动势的估算方法,通过估算反电动势推算出转子的位置;另一类是通过高频信号注入的方法,在永磁同步电机定子绕组中注入特定的高频电压信号,然后检测电机中对应的电流反馈信号来确定转子位置,利用电机的凸极性来实现转子位置的估算,对电机参数的变化不敏感,具有较好的低速性能。
本文提出了一种基于向定向绕组注入方波信号估算转子位置的控制方案,以提高整体的计算性能。采用高频正弦波方式,因为转子位置很难精确地估计。随着全新信号估算器的使用,当满足给定要求时,即可以实现无传感器的PMSM控制。
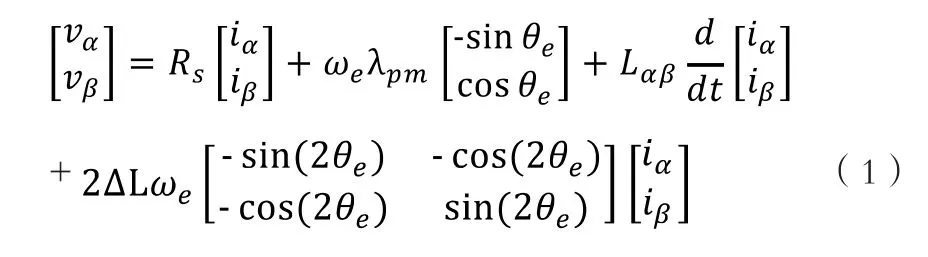
1 创设PMSM数学模型(高频的信号激励)
永磁同步电机的数学模型如下所示:假定在定子α-β静态参考系下:
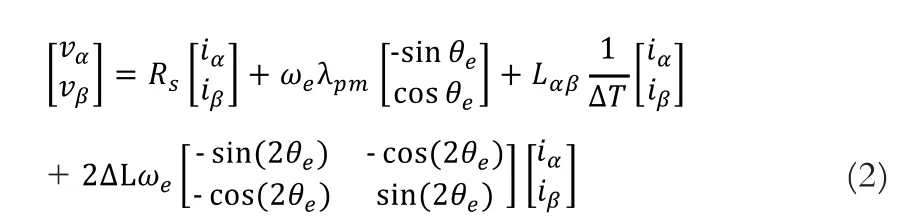
经过采样离散化以后,数学模型变为:

ΣL 和 ΔL是电机dq轴电感的平均值和差值。电感变化和转子位置之间的关系,θerr是估算同步坐标系和实际同步坐标系之间的位置误差。
2 注入信号的选择
在本文中通过注入高频方波电压信号去获得与转子位置相关的高频电流信号。由于d轴磁通不会影响转矩产生,所以本设计中往d轴方向上注入方波信号。

定子电流变化量为:

上式中如果假定 θerr≈ 0 , ΣL >> ΔL,那么可知,如果转子位置估算误差足够小,那么sin(2θerr)≈2θerr。

即转子位置的估计值收敛到转子位置的真实值。从式(9)中可以看出从q轴高频电流反馈中包含了角度信息。
注入电压信号与实际电流信号波形如图1。

图1 注入信号和反馈信号波形
在本文中,设计了一个基于软件锁相环的位置估算器,估算位置和转速信息。软件PLL计算量小,对于实时性要求高的电机控制领域非常适用,基于方波信号注入的传感器控制系统在原有FOC控制的基础上增加了高频注入模块和高频信号解算模块。
3 实验结果
为了验证采用高频方波电压信号注入法估计永磁同步电机转子位置的可行性与有效性,针对一台IPMSM进行了实验研究。实验系统采用STM32F103来实现方波高频电压信号注入的PMSM无传感器的控制。3000线光电编码器安装在电机后端,用于评估本设计中的转子位置和转速估算的效果。开关频率为10KHz,方波信号的幅值为60V,频率为625Hz。
4 结语
本文提出了一种采用注入方波电压信号去获取转子位置的方式,通过实验结果可以看出,这种控制方式在电机低转速时,相比传统的基于反电动势估算的方式,具有较好的动态性能以及较强的鲁棒性。这种方波电压信号注入的无传感器控制方式可以与基于反电动势估算相结合,在整个速度范围内获取更好的PMSM无传感器控制性能。
[1]徐艳平,王海垠,钟彦儒。基于脉振高频信号注入法的PMSM无传感器控制[J]. 电气传动 2009, 39(1) 11-14.
[2]K. Iizuka, H. Uzuhashi, M. Kano, T. Endo, and K. Mori,“Microcom-puter control for sensorless brushless motor,” IEEE Trans. Ind. Applicat. ,vol. IA-21, pp. 595–601, May/June 1985.
[3]S. Ogasawara and H. Akagi, “An approach to position sensorless drive for brushless dc motors,” IEEE Trans. Ind. Applicat. , vol.27, pp.928–933, Sept./Oct. 1991.
[4]李永东. 交流电机数字控制系统[M]. 北京:机械工业出版社,2002.
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
仪表技术与传感器(2022年6期)2022-07-27
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
郑州大学学报(工学版)(2020年2期)2020-06-16
中华建设(2019年3期)2019-07-24
汽车电器(2019年2期)2019-03-22
科教导刊·电子版(2017年16期)2017-07-21