模糊自适应PID控制的异步电动机软启动器研究
2018-01-24 11:56秦林
中国设备工程 2018年1期
秦林
(云南工业技师学院,云南 曲靖 655000)
异步电动机的在启动瞬间的启动转矩会造成较大的机械冲击,影响电机及其拖动设备的使用寿命,启动电流过大也会加速电动机老化,影响电网的供电和其他设备运行。随着工程机械的不断更新和发展,对电动机的启动性能要求越来越高,如:启动电流应尽可能小;启动转矩足够大且能平稳上升;启动过程的功耗应尽可能少;设备运行安全可靠,操作简单等。模糊控制的思想主要依靠的是人们来自于实践的经验知识,自适应控制的控制过程的特点是它可以随时修正自己的自身特性。将自适应控制策略运用到PID控制中,运用自适应相关控制原理来调整PID控制过程中的参数,能够自适应对未知系统或系统参数发生变化时所出现的一系列问题。
1 三相异步电机特性分析
三相异步电机接入的是380V三相交流电源,电机转子的转速与定子磁场的转速不同,存在转差率,三相异步电机的机械特性与转差率如式(1):
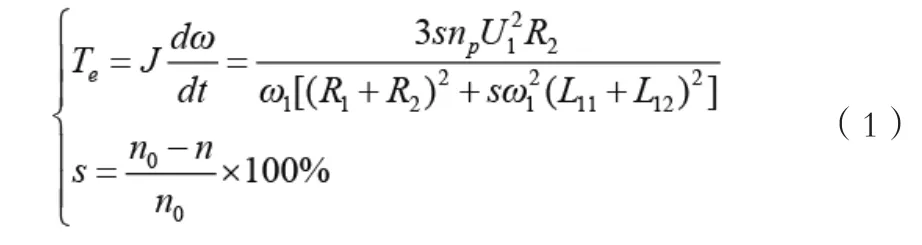
式中:ω为电机转速;J为电机的转动惯量;Te为电机的电磁转矩;s为电机的转差率;nP为电机的极对数;ω1为定子电源角速度;U1为定子电源相电压;R2为折算到定子侧的每相转子电阻;R1为每相定子电阻;L11为每相定子漏感;L12为折算到定子侧的每相转子漏感;s为转差率;n0为磁场转速;n为转子转速。
对于电机常用的软启动方法主要有:液态电阻软启动;可控硅串联降压软启动;开关变压器软启动;温控电阻软启动等。
2 模糊自适应PID控制原理
现实中的许多现象及关系比较模糊,如高与矮,长与短,大与小,多与少,穷与富等。这类现象具有“亦此亦彼”的模糊性。模糊PID的主要任务就是找出PID的Δkp,Δkl和Δkd三个参数与误差e和误差变化ec之间的模糊关系。
模糊自适应PID控制以常规的PID控制为基础,系统的输出量与用户设定的输入量之间的偏差e和两者的偏差变化率ec作为模糊控制器的输入量。模糊控制器的输出量是Δkp,Δkl和Δkd。通过模糊控制器,根据负载的实时特性由控制软件在线实时的调整模糊控制器的三个输出量,就可调整PID控制器中的kp、kl和kd参数,PID控制框图如图1所示。
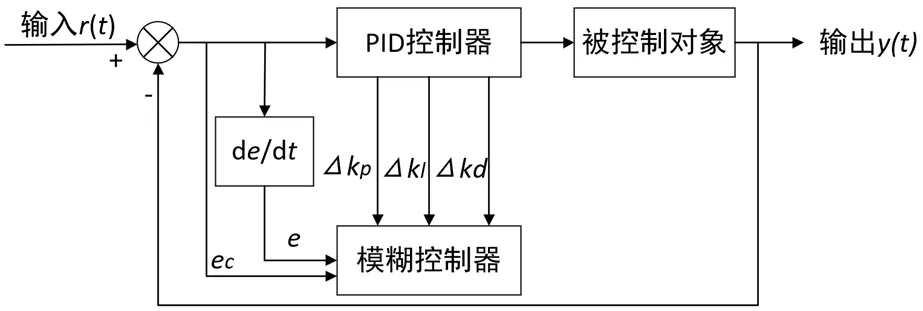
图1 模糊自适应PID控制图
PID的控制规律为:
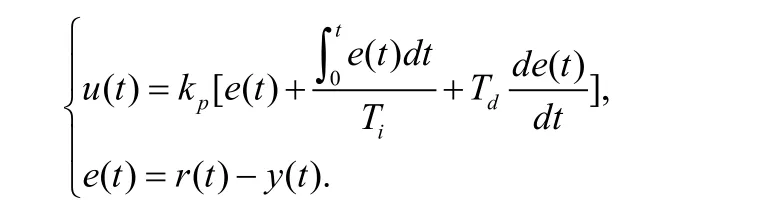
式中:Ti:积分时间常数;Td:微分时间常数。
控制系统响应的速度和调节的精度等控制指标与kp有关。当kp增大时,相应的控制指标也会随之増大和上升。当设计时将kp设置的较大时,则控制系统在运行过程中就会容易产生超调。如果kp过大的,控制系统的运行就会不稳定。相反,当kp的值变小时,相应的控制指标会减小和下降。
参数kl可用来反映系统的稳态误差,可通过调节kl的大小来降低或消除系统的稳态误差。增大kl的值可使系统的稳态的误差消除速度加快。若kl的值过大,控制系统则会发生积分饱和现象,此时系统的响应的过程就会产生较大的超调。如果在参数调整的过程中kl的值变得很小的话,则整个控制系统的调节会受到影响,因为当kl的值很小时就很难去除系统的稳态误差。
参数kd的主要作用是改善控制系统的动态特性。kd所在的微分环节能够将输入(r)与输出(y)的偏差信号变化趋势实时地给体现出来。通过在一个修正量在偏差变得过大之前将kd加入到系统里面,可提升控制系统响应的速度,缩短调节时间。为了提升整个系统响应速度,应设置较大的kp和较小的kd值。
3 MATLAB仿真分析
以220kW、6kV三相鼠笼式电机为研究对象,在MATLAB中建立模糊自适应PID仿真模型,并采用电流闭环的限流控制,设置Δkp、Δkl和Δkd的模糊子集,分别设为{NB,NM,NS,ZO,PS,PM,PB},模糊控制器的输出量的量化论域设为[-1,1],比例因子为1,隶属度函数为高斯函数,仿真程序框图如图2所示。
设置交流电频率为50Hz,电机的额定电流为32A,定子绕组电阻为1.83欧姆,定子的漏感为0.0358H,每相折合电阻为3.71Ω,折合漏感为0.0358H,励磁电感为0.9872H,电机的极对数为2。仿真结果如图3所示。
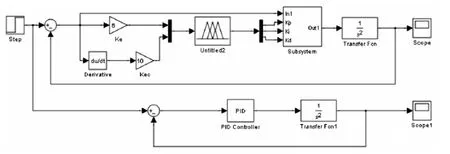
图2 模糊自适应PID仿真模型
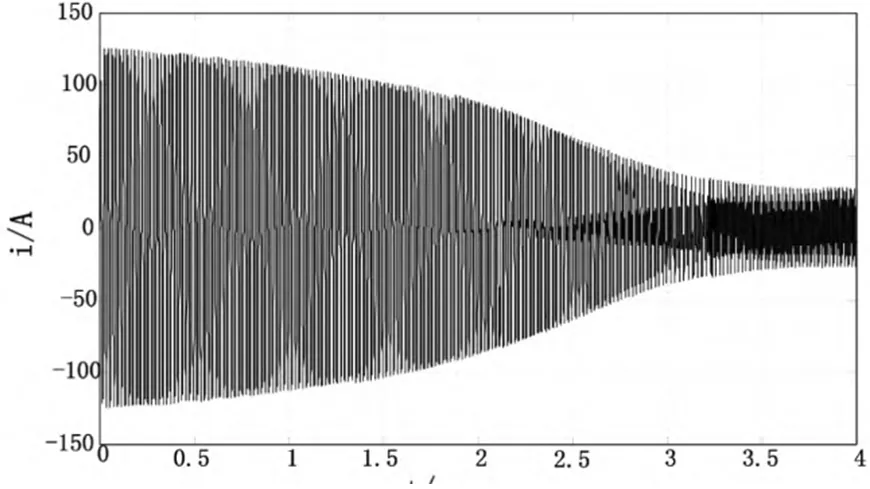
图3 模糊自适应PID电机启动电流变化曲线
根据图3可得,电机启动时的最大电流为122A,启动电流随着时间光滑地减小,所以电机是平稳加速的,在3.8秒左右电机定子电流迅速降低到额定电流值,电机达到额定转速。仿真结果表明模糊自适应PID控制能够很好地限制电机的启动电流。
4 结语
随着工程机械的不断发展,对异步电动机启动性能要求也越来越高,自适应控制的控制过程的特点是它可以随时修正自己的自身特性,运用到PID的控制中来调整PID控制过程中的参数,能够使系统自适应对系统的变化。模糊现象具有“亦此亦彼”的模糊性,通过模糊控制器,可调整Δkp、Δkl和Δkd三个输出量,从而可调整PID控制器中的kp、kl和kd参数。控制系统响应的速度和调节的精度等控制指标与kp有关,通过调节kl的大小可调整系统的稳态误差,调整kd可改善控制系统的动态特性。根据参考文献[3]的实验数据表明模糊自适应PID控制对电机的启动电流具有很好的限制作用。
[1]陈忠华, 刘勋, 郭凤仪. 模糊自适应PID控制的异步电动机软启动器的研究[J]. 电气传动, 2010(05):49-52.
[2]倪华中, 杨永立, 符向前,等. 一种自适应模糊PID软启器动在泵站改造中的应用[J]. 中国农村水利水电, 2013(11):126-131.
[3]魏磊. 基于模糊自适应控制的潜水泵软启动器的应用研究[D].安徽理工大学,2016.
[4]魏磊. 基于模糊自适应PID控制的矿用潜水泵电机软启动器[J]. 科技视界, 2016(01):130-131.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
中学生数理化·中考版(2020年10期)2020-11-27
海峡姐妹(2019年6期)2019-06-26
中学生数理化·中考版(2018年11期)2019-01-31
制造技术与机床(2017年3期)2017-06-23
农家科技中旬版(2016年1期)2016-03-03
中学生数理化·中考版(2015年10期)2015-09-10