一种下肢康复训练机器人
2018-01-19 10:43宋爱国吴常铖秦超龙
电气电子教学学报 2017年6期
石 珂, 宋爱国, 吴常铖, 秦超龙
(东南大学 仪器科学与工程学院, 江苏 南京 210096)
0 引言
“脑卒中”通常被称为“中风”或“脑血管意外”,是指由急性脑血管疾病引起的持续性的大脑神经功能缺损,其致残率较高,患者中85%引起偏瘫症状,尤其以中老年人居多。调查显示,“脑卒中”已成为中国国民死亡致因的首位。世界卫生组织研究数据显示:中国“脑卒中”发病率高于全球平均水平,并逐年上升,“脑卒中”已成为威胁国人健康的主要病症之一[1]。
“脑卒中”致残不是由肢体功能丧失引起的,而是人的相关中枢神经系统受损,无法对肢体形成有效控制,导致肢体行为能力丧失造成偏瘫。通过康复训练可以重新建立起肢体与受损脑部中枢神经的联系,促进脑部受损神经恢复,达到对肢体的有效控制[2]。“脑卒中”患者康复训练一般由专业理疗师辅助患者进行,但成本高且操作不便。机器人作为一种适用于长时间重复性运动的机械系统已被广泛应用于康复训练领域。例如:瑞士苏黎世联邦工业大学推出的LOKOMAT康复机器人是由步态校正器、减重器、跑步机组成的大型康复训练系统,该款机器人价格高昂且体积巨大,使用不便。上海交通大学于2006年研制的一款多自由度下肢康复机器人,该机器人基于并联机构设计,具有六个自由度,可以实现对下肢关节多个自由度的康复训练,该机器人结构复杂,成本较高,维护难度较高[1]。
本文设计了一种应用于下肢偏瘫患者康复训练的基于平行连杆的下肢康复训练机器人,结构简单,仅由一个电机驱动,通过并行连杆机构实现下肢康复训练运动,成本较低,使用方便,便于维护。以下就该机器人的机械结构以及软硬件设计方案进行相关分析。
1 机械结构设计
研究表明,每个人行走时下肢运动都是不同的,所形成的步态轨迹也存在差异,但总的说来,人体正常行走的步态轨迹近似为椭圆形,步态轨迹形成的椭圆水平宽度及竖直高度差异并不大。“脑卒中”患者由于肢体运动障碍,无法像正常人一样行走,所形成的步态轨迹可能是不规则图形[3]。由此可知,要实现偏瘫病患的下肢康复,需要设计一种运动机构,使其运动轨迹接近人体步态轨迹,患者下肢跟随机构进行规律运动,帮助患者模拟正常人体的下肢运动,促进其脑部受损神经恢复,使其逐渐恢复行走能力。
本文设计了一种平行连杆机构作为康复训练机器人运动机构,其机构示意图如图1所示。经过仿真计算结合实际情况,该平行连杆机构,可以通过改变其各边长比例与长短来调节步态轨迹的椭圆形状,以选择最佳运动轨迹。我们的设计是根据人体平均身高比例来确定运动轨迹范围,从而选择CD边长为200 mm,AB边长为CD的1/2,BH边长为700 mm,CE边长为360 mm,EG边长为300 mm作为机构的基础长度。图中圆形表示转动副,其中C、D两点固定在整体机架上,A点为电机转轴位置,其余连杆通过联动方式实现以使得GH连杆运动曲线为近似人体步态轨迹的椭圆形[4]。

图1 机构示意图
机构通过电机转轴绕A点转动,带动AB连杆运动,AB连杆带动EH连杆绕B点转动,BH连杆运动过程中,带动DF、EF及GH连杆运动,其中DF连杆绕固定在机架上的D点摆动,CE与DF连杆为平行四边形结构,所以CE连杆与DF连杆始终平行,EF连杆与CD连杆始终平行,下方EG与BH连杆同样构成平行四边形结构,EG连杆运动过程中始终平行于BH连杆,GH连杆平行于EF连杆,GH连杆为整个机构末端,在其上安装有踏板与患者脚部固定,带动患者进行康复训练。
采用3D绘图软件Solidworks绘制机构三维结构图如图2所示,中间采用镂空结构以在保证强度的基础上减轻重量,各转动副均安装轴承以保证运行顺畅,上方与机架固连处(CD处)设计为夹心式结构,以减少机构在运行时由于患者肢体及机构本身重力作用而产生的整体侧向偏移。

图2 机构三维结构图
图3所示是通过3D打印制作的脚垫,可以选择合适的形状,使得结构更加合理美观,采用树脂材料保证脚垫的柔韧性,减轻重量,也方便后期进一步改进优化,如添置相关传感器等。脚垫左侧设置插槽,用以和结构GH连杆中间镂空部分连接。侧面是一个顺滑的坡面,增加强度,用以承受患者脚部重力产生的力矩。脚垫上表面设置横条凸起,一方面起到加强结构强度的作用,另一方面增大表面摩擦力,减小脚面和脚垫表面的相对位移。外侧一边留有穿孔,用以固定脚部松紧绑带,使脚掌与脚垫固定在一起。下表面采用棋盘状网格分布,保证强度,减小重量。
2 系统软硬件设计
康复训练机器人需要带动患者下肢进行康复训练,所以需要提供足够的动力以及准确的控制,在其设计过程中需要选择合适的电机,设计相应的控制电路和控制算法来确保康复训练的效率与安全。还需设计友好的人机交互界面,便于操作。

图3 脚垫结构图
2.1 系统硬件设计
康复机器人采用功率为90 W的直流电机驱动,通过驱动器与主控电路相连接。机构采用STM32F103系列单片机作为主控芯片,该芯片拥有丰富的IO资源,可实现多路外部计数及脉冲输出,完全满足本机构控制要求。控制器通过适配的驱动器连接机构的两个驱动电机,通过对电机编码器数据正交解码获取电机转速与转向,经蓝牙通信发送至PC接收端,同步反映运行状态。整个电路由220 V家用电经48 V开关电源稳压供电。
2.2 系统软件设计
系统软件设计分为下位机和上位机两部分。分别实现机构运行控制和人机交互。
1)下位机软件设计
在生物教学中存在着许多的重点与难点知识,但是受到教学条件等因素的影响,使得学生的理解难度不断增加,进而产生了厌烦的心理。针对这一现象,教师就可以借助视频或是PPT来进行教学,组织学生观看视频内容,从而找出学习的重点,提高学习的效果。
下位机程序使用C语言编写,编译环境为Keil5。程序示意图如图4所示。首先执行IO、定时器及串口初始化程序,然后配置IO为双路正交解码及双路脉冲宽度调制输出,设置脉冲频率及初始脉宽。串口使能后,复位串口,初始化串口参数,通过读写指令实现数据发送与接收。使能IO输出功能,控制驱动器及继电器工作。使能IO输入功能,设置其为正交解码模式,接入编码器信号,获得当前电机转速与转向。由于机构需要承载一定的腿部重量,且由于整个机构存在自重,所以在整个机构运行阶段,仅通过驱动器对电机的闭环调节速度不能保持恒定值,影响康复效果。所以通过PID算法在机构运行过程中,对电机转速进行实时调整,使机构运行平稳。
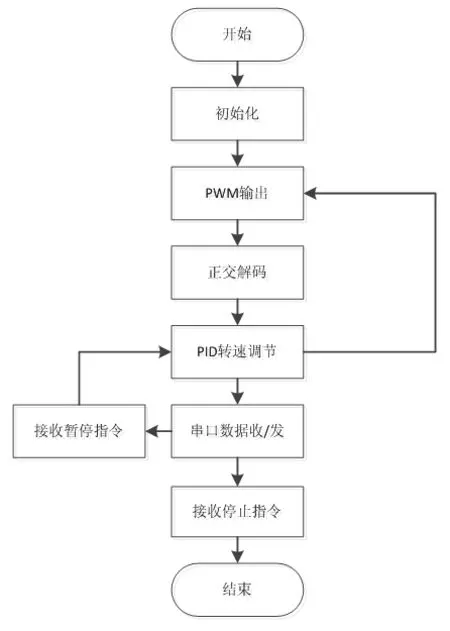
图4 下位机软件示意图
2)上位机软件设计
在VisioStudio2012编译平台上采用C++语言进行上位机软件的编写。首先执行MFC程序初始化,包括按钮、绘图框、标题栏等的初始化。然后进行康复模式设置,选择康复模式以及康复机构运行速度,目前康复模式仅设置为全周运动,即左右机构均进行整周转动,康复速度分为高中低及自定义四档,选择完成后会有对应图标亮起以提示当前模式,在选择高速模式或自定义模式速度设置过高时,会弹出确认窗口,以再次确认速度,防止失误设置较高速度对康复训练者造成突然损伤。
设置模式后,点击开始按钮,机构运行,接收下位机传送的编码器数据,确定当前机构运行位置,以简单图形绘制在界面上,对运动状态进行实时显示。康复界面设置计时工具,以明确当前康复训练时间,防止运动过量产生不良后果。软件界面如图5所示。
3 系统分析
本文所设计的下肢康复训练机器人,为单自由度康复训练机器人,采用并行连杆机构,由末端踏板带动患者脚部进行下肢康复训练。通过前述的控制算法保证运行过程中末端运动的平稳性、流畅性,从而给患者提供安全可靠的康复训练。使用过程中,患者将脚部通过绑带固定在踏板上,设置训练模式,启动机器人即可开始训练。同时,通过下位机电路实时监测电机电流,一旦发现电流过大即启动保护模式,切断电源,防止患者造成二次损伤。

图5 人机交互软件界面示意图
该康复训练机器人设有被动康复训练和主动康复训练两种训练模式。
(1)被动康复训练模式为康复训练机器人带动患者进行康复训练,适用于下肢完全丧失运动能力的患者,患者脚部与机器人末端固定后,完全由机器人带动其足部按照设定轨迹运动,完成康复训练。
两种训练模式针对不同损伤程度的患者,进行有计划的、循序渐进的康复训练,逐步恢复患者的运动能力。
4 仿真验证
将设计的机构模型进行Adams运动学仿真可以得到机构的运行轨迹。Adams是使用率很高的机械仿真软件,用户可以利用Adams的多种功能实现机械设计的仿真,提高设计效率。本机构进行Adams仿真旨在确认机构运行轨迹,确保机构的有效性。
由于机构为连杆机构,结构简单,所以直接在Adams中绘制机构原理图。如图6所示,其中上部中间连杆与地固定连接,通过转动副与大腿连杆连接,大腿连杆通过转动副与中部中间连杆相连,中部中间连杆通过转动副与小腿连杆相连,并与长连杆相连,下部中间连杆连接小腿连杆及长连杆,长连杆通过转动副连接动力连杆,动力连杆与地面通过转动副相连,并在此转动副上添加逆时针转动动力,设置转动速度。设置好运动副和动力源后选择“仿真”运动仿真。此时机构处于运动状态,动力连杆绕运动中心旋转,带动其余连杆联动。

图6 Adams仿真原理图
打开仿真Simulation功能进入设置界面,选择横坐标为下部连杆任一点X方向位移,纵坐标为该点Y方向位移。得到运动轨迹如图7所示。

图7 Adams仿真机构运行末端轨迹图
可以发现轨迹大致为一个椭圆,X方向位移为250 mm,Y方向位移为150 mm,可以看出末端运行轨迹下部与标准椭圆吻合较好,上部稍有允许范围内的误差,符合正常人体步态轨迹数据。从运动轨迹上确认了机构的有效性。
图8所示是机构终端即踏板处在X、Y方向上的加速度图,可以看出虽然在X、Y方向上加速度有所变化但均未超过50 mm/s2,处在一个安全的范围内,整体运动过程较柔和,康复训练者脚部受力不会突然变化过大而产生二次损伤[5]。
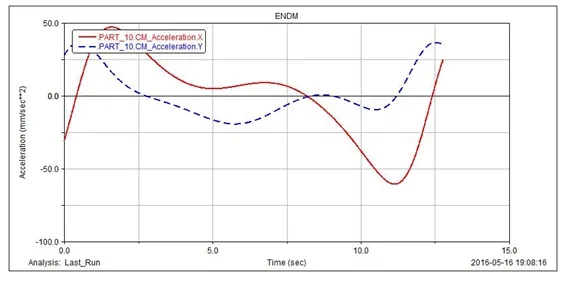
图8 机构末端加速度图
5 结语
本文针对当前“脑卒中”患者日益增多,对国家社会负担越来越大的问题,设计了一种下肢康复机器人,旨在帮助“脑卒中”偏瘫患者进行术后康复训练以便尽早恢复行走运动能力。从研究人体正常行走步态轨迹入手,设计康复训练机器人机构,使其能够对偏瘫患者进行以恢复行走为目的的训练。通过仿真确定了机构的有效性,设计下位机电路及软件以及PC交互界面后,进行零部件加工并组装调试,通过实验验证康复训练机器人的有效性。接下来将
进一步进行临床实验,通过患者的康复训练数据对机构有效性做进一步评估。
康复机器人市场前景广大,需求量高,进行康复机器人研究有助于为国家、社会、家庭减轻负担,有助于帮助患者尽早恢复行走能力。在接下来的研究中,将根据实验数据以及患者实际需求,进一步优化该康复机器人性能,使其功能更加完善,康复训练效果更加显著。
[1] 徐国政, 宋爱国, 李会军. 康复机器人系统结构及控制技术[J].北京:中国组织工程研究与临床康复, 2009, (04): 108-128.
[2] 刘翠华, 张盘德, 杨杰华, 容小川. 智能康复训练器对脑卒中患者综合康复治疗的疗效观察[J]. 北京:中国康复理论与实践, 2011, (01): 98-125.
[3] Cullell,J.C.Moreno,E.Rocon,A. Forner-Cordero,J.L. Pons. Biologically based design of an actuator system for a knee-ankle-foot orthosis[J]. Mechanism and Machine Theory.2008 (4).
[4] 刘军凯,孙宁,黄美发. 下肢康复训练机器人步态运动机构设计[J]. 北京:机械设计与研究, 2006(05).
[5] 伊蕾,张立勋,于彦春. 六连杆助行机构的动力学分析及仿真研究[J]. 中国康复医学杂志, 2010(07).
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年2期)2020-12-14
中华养生保健(2020年2期)2020-11-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
汽车实用技术(2017年16期)2017-09-21
中国三峡(2017年2期)2017-06-09
制造业自动化(2017年2期)2017-03-20