广义时变系统的鲁棒H∞容错控制
2018-01-18 12:17苏晓明赵亚
计算技术与自动化 2017年4期
苏晓明+赵亚
摘 要:对于一类广义时变不确定系统,在执行器故障情况下给出了系统具有容许性的充分条件,并设计反馈控制器使其满足给定的H∞干扰衰减指标,使得系统在正常与故障情况下都具有容许性.最后给出数值算例来证明结论的有效性.
关键词:广义时变系统;容许性; 鲁棒H∞容错控制; 状态反馈
中图分类号:O231 文献标识码:A
Robust H-infinity Fault-tolerant Control Against Actuator Failures for Descriptor Time-varying System
ZHAO Ya,SU Xiao-ming
(Shenyang University of Technology,Shenyang,Liaoning 110870,China)
Abstract:A class of descriptor time-varying uncertainty system has been investigated.In the case of actuator failures,a sufficient condition of the systems stability is given,and a state feedback controller is designed to satisfy the pre-set H-infinity disturbance attenuation index so as to keep certain H-infinity norm performance in the normal condition as well as in the event of actuator failures.A numerical example shows the effectiveness of the proposed method.
Key words:descriptor time-varying system;admissibility;robust H∞fault-tolerant control;state feedback
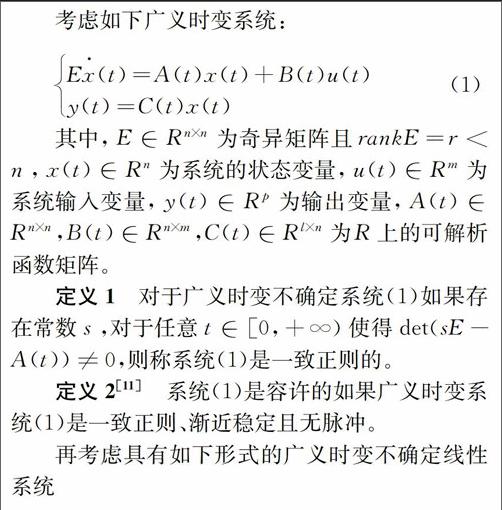
1 引 言
广义系统廣泛存在于工程应用之中的电力系统、受限机器人运动、化工过程、社会经济等领域系统中。随着国内外众多学者的努力,研究了广义系统的正则性,稳定性,能观、能控性,极点配置等问题。但是基于广义系统的故障诊断与容错控制领域仍不能满足现代工业发展的实际需求,所以对广义系统进行容错控制的研究被认为是改进系统稳定性的有效途径。作为近年来控制学科中的热点问题—鲁棒控制问题,它越来越受到研究学者们的重视,主要研究具有参数不确定性的被控对象在执行器或传感器故障前提下使设计的控制器仍使闭环系统保证容许性并且满足一些特定的性能指标。在过去的几十年中,相关研究已经取得了一些成果[1-8].文献[9]成功的把鲁棒容错控制和保性能控制器结合在一起,保证了系统的稳定性并设计了相应的控制器。文献[10]利用带有约束的广义代数Riccati不等式在执行器或者传感器正常及出现故障情况下,给出了广义系统存在H∞可靠性控制器的充要条件以及设计方法.
容错控制是指在系统某些部件发生故障的情况下,仍能保证闭环系统稳定且具有较理想的性能,即容错控制具有使系统的反馈对故障不敏感的作用。容错控制系统由传感器、执行器、故障检测系统和容错控制器组成,结构如下:
它作为一门交叉学科,它与鲁棒控制、故障检测与诊断、自适应控制、智能控制等息息相关。现代控制、信号处理、模式识别、最优化方法、决策论、统计数学等学科构成了容错控制的理论基础。 Zames[12]在1981年首次提出H∞概念, 控制问题由于带外界干扰,以控制系统内某些信号间传递函数的范数为优化设计指标,目的是通过设计控制器,使得闭环系统对外界干扰有一定的抑制作用。鲁棒H∞容错控制问题就是同时考虑鲁棒容错设计和H∞控制问题,它研究的是广义不确定系统存在执行器或传感器故障以及存在外部干扰条件下的控制问题,并使用Riccati方程和LMI[13]方法,文献[14]给出了不确定系统对执行器失效具有完整性且满足给定干扰衰减指标的一个充分条件。文献[15-17]将鲁棒容错控制和H∞控制问题结合起来,取得较好的成果。
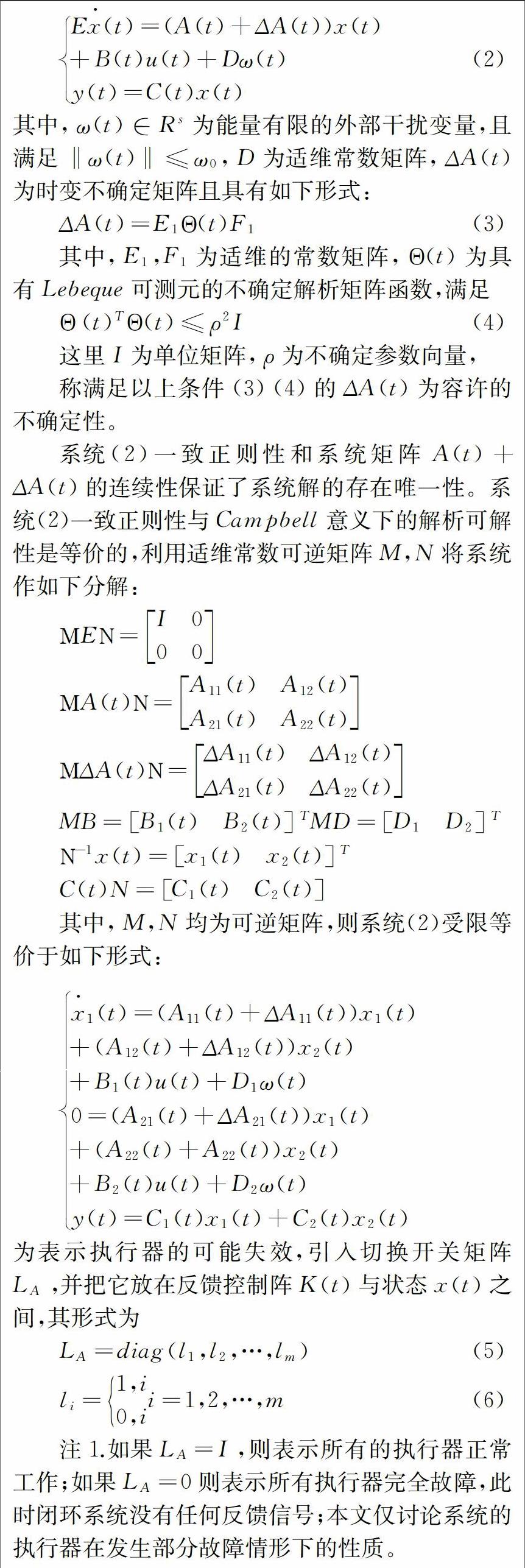
但是对于广义时变系统而言此类问题的研究却非常有限,本文针对执行器故障的广义时变系统,研究了鲁棒H∞容错控制问题,基于Riccati方法设计了反馈控制器,给出了鲁棒H∞容错控制问题可解的充分条件,采用所设计的反馈控制器,使得闭环系统在任意执行器出现故障时都可保持容许性且满足给定的干扰衰减性能指标。
3 主要结论
3.1 给出了系统(2)满足无脉冲的条件
3.2 鲁棒H∞容错控制律的设计
3.2.1 无故障情况下的容许性
系统(2)表示系统无故障,下面我们来证明系统的容许性。
因此,由Lyapunov稳定性得系统(2)是渐近稳定的。
注 系统发生执行器故障前,证得系统为容许的,下文故障后系统仍为容许,从而保证了我们设计的鲁棒H∞容错控制器的有效性。
3.2.2 有故障情况下的鲁棒H∞容错控制
对系统(8)设计容错控制律的目的是当系统存在执行器故障时,使系统仍能保证容许性。
由以上结果,我们通过设计反馈控制器求出系统的解,保证了系统在正常无故障情况下的容许性和系统在执行器部分故障情况下的稳定性。本文通过设计状态反馈控制器保证了系统的渐近稳定性且满足给定的干扰衰减。数值算例结果验证了该设计方法的可行性和有效性。
5 结 论endprint
本文研究了具有執行器故障的广义时变系统的鲁棒H∞容错控制问题和稳定性问题。基于代数Riccati不等式方法和Lyapunov稳定性理论,给出了保证闭环系统在执行器故障情况下的稳定的成分条件并且设计了鲁棒容错控制器来保证系统的鲁棒稳定性且满足给定的干扰衰减指标,并且引入数值算例结果验证了该设计方法的可行性和有效性。
参考文献
[1] ZHU Bao-yan,ZHANG Da-qing,ZHANG Qing-ling.Dissipative fault-tolerant control for T-S fuzzy descriptor systems [C].Proceedings of the 32nd Chinese Control conference,2013,July 26-28,Xi-an ,China.
[2] 陈跃鹏,张庆灵,翟丁.一类不确定广义系统的分散容错控制[J].控制与决策,2005,(20),741-750.
[3] 状态观测器系统的鲁棒容错控制[J].控制理论与应用,2001,18(2):249-252.
[4] YU Dan-dan,ZHANG Xian,LIN Xue.Reliable Passive Control for a class of delayed singular systems with random failures[J].Control and Decision Conference,2013,12(26):3347-3352.
[5] YANG Chun-yu,ZHANG Qing-ling ZHANG Fu-zhen.Robustness analysis of descriptor systems with parameter uncertainties [J].International Journal of control Automation and Systems,2010,8(2):204-209.
[6] YANG Chun-yu,ZHANG Qing-ling ZHANG Fu-zhen.Fault-tolerant H∞control design of a class of switched systems with sensor failures [J].International Journal of Innovative computing,Information and control,2009,l5(11):3827-3838.
[7] 周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000.
[8] 叶银忠,李三广,蒋蔚孙.理论方法设计容错MIMO系统的方法[J].自动化学报,1993,19(5):609-614.
[9] 王福忠,姚波.不确定线性系统的最优保性能可靠控制[J].数学的实践与认识,2005,35(6):153-160.
[10] 陈跃鹏,张庆灵.广义系统 可靠性控制[J].控制理论与应用,2005,22(3):407-412.
[11] 苏晓明,张庆灵.时变广义系统的稳定性[J].东北大学学报:自然科学版,2001,22(5): 572~575.
[12] ZAMES G.Feedback and optimal sensitivity:Model reference transformation.Multiplicative seminars and approximate.[J].IEE.Trans.Automatic.Control. 1981,26(2):301-320.
[13] 俞立.鲁棒控制——线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[14] 滕青芳,范多旺.不确定系统的鲁棒容错控制[J].电光与控制,2007,14(6):78-81.
[15] 王福忠,姚波.考虑执行器故障的线性系统可靠控制[J].自动化与仪器仪表,2004,(6):6-8.
[16] 静金生,王执铨.鲁棒容错 控制系统设计[J].控制理论与应用,2001,18,(26):47-49.
[17] 邵克勇,周鸾杰,张会珍,等.基于 的鲁棒容错 控制系统设计[J].大庆石油学院学报,2004,29(1):78-80.
[18] ZHANG Q L,ZHANG X F,ZHAI D.Fundamentals of control theory[M].Beijing: Higher Education Press,2008.
[19] LI X,DE SOUZA C E.Delay-dependent stability and stabilization of uncertain linear delay systems: A linear matrix inequalities approach.IEEE Trans Automic Control,1997,42(8): 1144.
[20] ZHOU K,KHARGONEKAR P P .Robust stabilization of linear systems with norm-bounded time-varying uncertainty [J].Systems and Control Letters,1998,10(1): 17 -20.
[21] MASUBUCHI,KAMITANE Y,OHARA A,et al.control for descriptor systems: a matrix inequalities approach[J].Automatic,1997,33(4):669-673.endprint