
虚拟仪器在植物碳汇测量中的应用
2018-01-18 00:48宋文龙
自动化与仪表 2017年7期
宋文龙,于 越,王 琢
(东北林业大学 机电工程学院,哈尔滨 150040)
微碳汇指单株植物对CO2的固定能力或固定量。研究温度、湿度与植物碳汇量的关系,有助于提高植物对CO2的固定能力。国内外有多种测量植物碳汇量的方法,如样地清查法、涡度相关法、箱式法等,其中箱式法测量误差小、精度高,且易于实现[1]。箱式法的重点在于建立温湿度可控的植物培养系统。国内现有的植物培养系统像智能化植物温室大棚,虽能自动调节室内温度为植物提供良好的生长环境,但由于温室面积较大、温湿度控制精度低、滞后现象严重、响应时间长,很难为研究植物在不同温湿度条件下的生长规律提供帮助。有些国家温室技术发达,即使室内面积大,仍可依靠其良好的技术和设备对室内温度进行高精度控制,但成本过高,且缺乏样本灵活性[2]。而微碳汇研究要求研究对象易于更换、温湿度可及时调整,故上述温室并不适用。如果减小培养空间,在小空间内配置高品质设备,在降低成本的同时,提高室内温湿度控制精度,降低系统的滞后性,增强系统实时性,提高研究对象的灵活性,便于在短时间内研究不同植物在不同模拟环境中碳汇量的变化。
虚拟仪器可以降低现场在线测试的困难程度,提高实验效率,降低实验成本。设计一种基于虚拟仪器的植物培养系统,主要分为监测部分与控制部分。监测部分利用LabVIEW虚拟仪器与温湿度变送器实时采集并监测系统内部温湿度,控制部分利用模糊控制方法结合各个执行机构实现对系统内部温湿度的控制。
1 植物培养系统结构
整个系统由工控机、LabVIEW虚拟仪器、温湿度变送器、微处理器、执行机构(其中附加设备包括开窗、浇水等)等组成。系统原理如图1所示。

图1 系统原理Fig.1 Diagram of system schematic
温湿度变送器采集系统内部空气温湿度数据,通过RS-485串口与微处理器和工控机上的Lab-VIEW虚拟仪器通信。微处理器对数据进行显示、并带有报警功能;虚拟仪器对数据进行处理并显示,且带有报警、阈值设置、历史数据查看等功能;工控机对数据进行处理并实现模糊控制,通过RS-485串口与微处理器通信,将控制信号发送给微处理器,由微处理器控制执行机构调节系统内部温湿度。系统结构如图2所示。

图2 系统结构Fig.2 Diagram of system structure
系统空间分为两部分,植物培养室和工作室。植物培养室主要用于放置植物,内置空气温湿度变送器采集温湿度信息;工作室内包括电阻加热器和由蒸发器、压缩机、冷凝器组成的空调制冷系统。各部分硬件的选型如下:温湿度变送器选用MQ3485,内置数字化电路,不必额外设计A/D转换电路,减少电路复杂程度,温度测量范围-40~+80℃,精度±0.1℃,湿度测量范围 0~100%RH,精度±2%RH,满足系统要求;电阻加热器为1200 W,配合风扇组成升温系统;制冷压缩机选用日立WHP00680BSX-Y1DN,内部制冷剂为氟利昂BSRT12,与冷凝器、蒸发器构成降温系统;工控机、温湿度变送器、微处理器均采用RS-485通信,最大通信距离1200 m,最大传输速率10 Mb/s,满足系统要求;微处理器采用MSP430单片机,其处理能力强、功耗低、运算速度快[4],适用于此系统。
2 虚拟仪器设计
LabVIEW是虚拟仪器技术中最常用的编程语言,其图形化程序语言配合数据流形式使虚拟仪器的编写更为简单高效[5]。采用LabVIEW编写用于植物培养系统的虚拟仪器,其程序流程如图3所示。
上电后,先设置串口参数与温湿度阈值,与串口连接后,LabVIEW通过RS-485总线向MQ3485发送命令帧01 03 00 00 00 02 C4 38,MQ3485 返回01 03 04 xx xx xx xx[CRC16 位], 其中第 4、5个字节是温度数据,第6、7个字节是湿度数据,对数据处理后保存并绘制曲线,并与设定温湿度对比,决定是否调用模糊控制程序对温湿度进行调整,模糊控制程序由Matlab编写,通过LabVIEW中的Matlab script节点调用。整个虚拟仪器的前面板如图4所示。
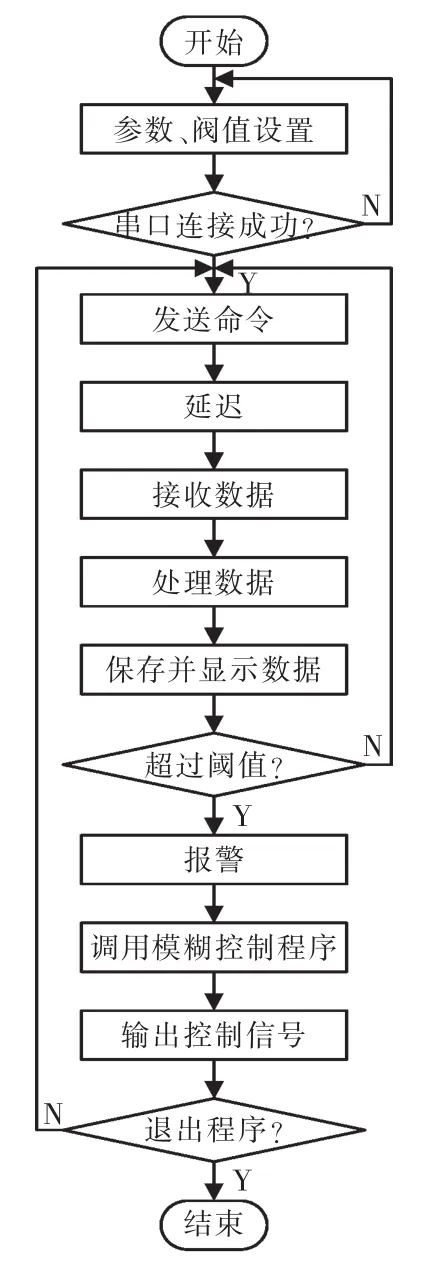
图3 程序流程Fig.3 Program flow chart

图4 虚拟仪器前面板Fig.4 Front panel of virtual instrument
虚拟仪器主要功能包括数据采集并显示、参数设置、模糊控制、历史数据、报警、设备控制等,每个功能由1个或多个子vi实现。数据采集显示功能主要是对数据进行转化并截取,将其绘图、显示;参数设置功能包括对串口参数设置、初始温湿度设置、报警阈值设置、时间设置、延迟时间设置等;模糊控制功能利用LabVIEW中的Matlab script节点调用Matlab模糊控制程序,LabVIEW向其传递输入误差和误差变化率,经运算后将控制结果返回给LabVIEW;历史数据功能可以按时间查询历史数据、导出数据到Excel表格等;报警功能利用布尔变量充当报警指示灯,提示温湿度是否在设定范围内;设备控制功能用于检测对应设备的运行情况。
3 模糊控制系统设计
系统中的温湿度具有耦合性、非线性和不确定性,无法建立精确的数学模型,常规PID控制并不适用。模糊控制不依赖被控对象的精确数学模型,鲁棒性强,适用于非线性、滞后性系统[6-8],故采用模糊控制方法控制系统内部温湿度。
3.1 模糊控制系统的结构
分别对温度和湿度采用双输入单输出的模糊控制器,模糊控制系统框图如图5所示。

图5 模糊控制系统Fig.5 Fuzzy control system
其中 x1、x2为给定温、湿度,e1、e2为温、湿度的偏差,ec1、ec2为温、湿度偏差变化率。 c1、c2为模糊控制器输出的清晰量,由于温、湿度间存在耦合,故引入解耦环节,其中 β1、 β2为温、湿度解耦系数,k1、k2为比例因子,u1、u2为经过温湿度解耦后控制器的实际输出量,计算公式为

微控制器接到控制信号,控制驱动电路从而控制各个执行机构的输出,调节培养系统内部环境。
3.2 模糊控制器设计
模糊控制器主要包括模糊化、模糊推理、设计模糊规则表、清晰化4个部分。选取输入温度误差e1、误差变化率 ec1、输出 c1的模糊论域均为[-3,+3],选取 7 个模糊子集{NB,NM,NS,ZE,PS,PM,PB}划分输入输出模糊论域,对于NB和PB采用高斯隶属度函数覆盖,其他均采用三角形隶属度函数覆盖。采用Mamdani的min-max推理法则[9]进行模糊推理,根据经验可得模糊控制规则如表1所示。利用重心法对输出的模糊量清晰化。采用同样的方法可以得到湿度模糊控制器的设计方法。

表1 模糊控制规则Tab.1 Fuzzy control rule table
4 仿真与实验
利用Matlab对常规PID和模糊控制算法进行仿真验证模糊控制的有效性。以温度为例,假设给定温度为20℃,模糊控制器输入温度误差和误差变化率的基本论域分别选为[-10,10]、[-1,1],根据文献[10]的分析和多次实验分析,设温度解耦系数β1、β2分别选为 0.03,0.02,2 种控制方法仿真结果如图6所示。
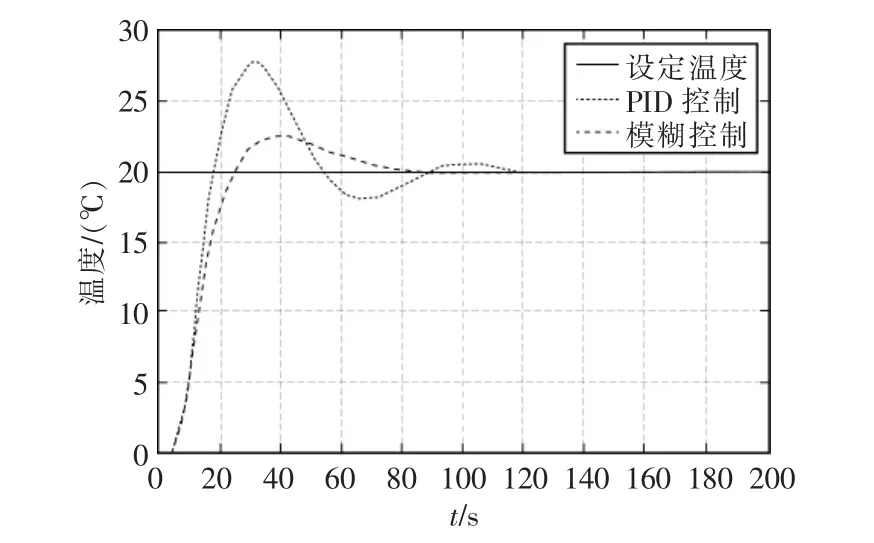
图6 系统响应曲线Fig.6 System response curve
由图6可看出,模糊控制的调节时间约为118 s,明显比PID控制调节时间短;模糊控制的最大超调量约为12.5%,明显比PID控制的最大超调量小,故相比于PID控制模糊控制能在更短的时间内达到指定温度,且过程较为平稳。
实际操作中,给定培养系统内部温度25℃,湿度50%RH,采用模糊控制对系统内部温湿度进行调节,通过LabVIEW对系统温湿度进行实时采集,利用LabVIEW的历史数据子vi统计一天中几个时刻系统的温湿度变化如表2所示。
由表2可以看出,一天内植物培养系统内部温度误差范围为[-0.3℃,+0.3℃],湿度误差范围为[-3%RH,+4%RH],证明培养系统内部环境满足植物生长条件和微碳汇研究要求。
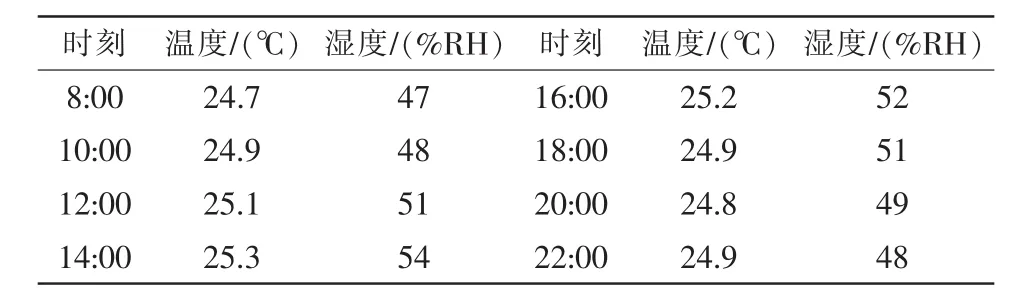
表2 检测结果Tab.2 Test result
5 结语
研究植物微碳汇与其生长环境中的温、湿度关系是十分必要的,以此为目的设计一种植物培养系统,系统主要包括LabVIEW虚拟仪器、工控机、执行机构及其驱动电路,采用模糊控制对系统内部的温湿度进行控制。仿真结果表明,模糊控制方法比常规PID方法的超调量小,调节时间短。实验结果表明,一天内系统内部温度误差不大于0.3℃,湿度误差不大于4%RH,此植物培养系统能为植物提供一个良好的生长环境,并为微碳汇研究提供良好的实验基础。
[1]赵林,殷鸣放,陈晓非.森林碳汇研究的计量方法及研究现状综述[J].西北林学院学报,2008,23(1):59-63.
[2]吕景辉,任天忠,闫德仁.国内森林碳汇研究概述[J].内蒙古林业科技,2008,34(2):43-47.
[3]彭永刚,韦巍.人工气候箱温湿度模糊控制[J].农业工程学报,2006,22(8):166-169.
[4]刘忠超,殷华文,郭抒颖.基于MSP430单片机的智能仪表设计[J].自动化与仪表,2015,30(5):20-24.
[5]李建国,陈永超,赖立海,等.基于LabVIEW和RS485通信的光伏监测系统[J].自动化与仪表,2014,29(4):16-19.
[6]施雨农,叶春生.基于模糊控制的前车灯检测系统[J].电子测量技术,2014,37(5):64-67.
[7]高阳,赵生,许式强,等.实验室烟草烘烤机模糊智能解耦温湿度控制[J].食品工程,2015,36(7):216-218.
[8]曹建秋,徐凯.遗传算法优化的模糊+变论域自适应模糊PID复合控制策略[J].信息与控制,2011,40(1):45-50.
[9]朱颖合,薛凌云,黄伟.基于自组织调整因子的模糊PID控制器设计[J].系统仿真学报,2011,23(12):2732-2737.
[10]卢佩,刘效勇.温室大棚温湿度解耦控制系统设计与仿真[J].农机化研究,2006,22(8):166-169.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
河北农机(2020年10期)2020-01-08
电子制作(2019年16期)2019-09-27
电子技术与软件工程(2019年16期)2019-09-17
电子制作(2018年12期)2018-08-01
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
电子制作(2017年9期)2017-04-17
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
