
基于非对称模型的欠驱动USV自适应路径跟踪控制
2018-01-15 05:35:55张建强
系统工程与电子技术 2018年1期
陈 霄, 刘 忠, 张建强, 董 蛟
(海军工程大学电子工程学院, 湖北 武汉 430000)
0 引 言
路径跟踪问题是无人艇(unmanned surface vehicles,USV)运动控制领域备受关注的研究热点,定义为USV在控制系统的驱动下,无时间跟踪要求,从任意初始状态出发,收敛到一条给定的期望路径,并以期望的纵向速度沿该参考路径运动[1]。不具有侧向推进器或侧向推进器在高速航行时失效的USV是一类典型的欠驱动系统,由于控制输入个数少于其所需控制的自由度个数,故该类系统存在不可积的加速度约束[2]。目前国内外对于欠驱动USV路径跟踪控制已有较多的研究成果,根据所要跟踪路径的几何形状可分为直线和曲线路径跟踪,两者的主要区别在于USV直线路径跟踪是在平衡点附近的较小邻域内进行镇定控制,通常的做法是对模型进行一定的线性化处理且忽略横向漂移,在特定的条件下满足控制要求;曲线路径跟踪控制需要考虑USV的操纵运动,横向漂移不可忽略[1]。基于视线(line-of-sight, LOS)导引策略常用于USV的路径跟踪控制中,文献[3]研究了非对称USV模型的直线路径跟踪问题,设计了基于坐标变换的全局k指数路径跟踪控制器和海流观测器,但并未考虑更为一般的曲线路径跟踪控制问题。文献[4]为克服USV实际航行中时变漂角对路径跟踪控制质量的影响,设计并验证了一种基于LOS制导和模糊自适应比例-积分-微分(proportional-integral-differential,PID)航向控制的直线路径跟踪控制算法。文献[5]利用增量PID、模糊PID等控制算法实现了海流环境下欠驱动USV的直线路径控制,实验证明所采用的控制算法可有效抵抗外界海流扰动,具有一定的鲁棒性,同样未考虑曲线路径跟踪问题。文献[6]考虑海流等外界干扰对USV运动学模型的扰动进行了路径跟踪控制研究,设计了基于积分LOS制导律和反馈线性化的直线路径跟踪控制器,并证明了当控制目标实现时,控制系统的一致全局k指数稳定性,但忽略了USV模型的非对称特性。文献[7]设计了一种参数在线优化的路径跟踪自抗扰控制器,实现了存在海流扰动及模型参数摄动下的直线和曲线路径跟踪控制,但并未给出控制系统的稳定性分析。文献[8]基于LOS导引策略和抗饱和PID控制算法设计了直线航迹跟踪控制器,并进行试验验证。文献[9]提出了用于补偿外界环境干扰的积分视线(integral LOS,ILOS)导引控制律,并给出了系统的稳定性证明。文献[10]将外界干扰视为常值扰动,提出了间接自适应LOS制导律和直接自适应LOS制导律,并基于相对运动速度的量测,与滑模航向跟踪控制器共同作用,分别获得了两种曲线路径跟踪控制系统的一致全局k指数稳定性和一致全局稳定性。
以上文献以及目前大多数USV路径跟踪研究成果中,为便于控制器设计和稳定性证明,通常忽略USV的前后不对称性,假定USV前后左右均对称,采用惯性系数矩阵和阻尼系数矩阵均为严格对角型的模型,而实际船体一般为左右对称、前后不对称的结构,存在建模误差;在考虑外界环境干扰时,多数文献忽略海流对USV运动学模型的扰动,而将其与风、浪以及未建模动态一起看作是USV动力学模型上的扰动。而实际中,海流对USV操纵运动的影响只是运动学上的,引起USV漂移而改变其速度和位置,使其偏离计划航线和航向。此外,多数基于LOS制导律的路径跟踪控制器不能同时满足直线和曲线路径跟踪控制的需要。
针对以上问题,本文考虑海流对USV运动学模型的扰动,建立非对称性USV数学模型,利用合适的坐标变换,解除控制输入与欠驱动运动自由度的耦合。其次,基于级联系统理论,分别设计自适应位置误差控制律和艏向误差控制律,实现了USV对任意期望路径的跟踪控制。之后,基于级联系统理论和李雅普诺夫理论证明了当所有控制目标实现时,控制系统为一致半全局指数稳定和一致全局渐进稳定的,相比现有文献中控制系统的一致全局k指数稳定性,一致半全局指数稳定具有更快的收敛速度和更强的鲁棒性。最后,仿真实验验证了所提出算法的有效性和先进性。
1 非对称USV运动模型及问题描述
1.1 USV运动建模
欠驱动USV的水平面三自由运动学和动力学模型[1]为

(1)
(2)
(7)
由式(4)和式(5)可以看出,USV在非完全对称的情况下,惯性系数矩阵M和阻尼系数矩阵D(vr)的非对角线元素存在非零项,因此前向推力和横向运动之间存在耦合关系,这就给控制器的设计带来复杂性。
1.2 模型坐标变换
为便于下文控制器的设计,本文将船体运动坐标系{b}的原点变换到船体枢心位置处,去除偏航力矩对横向运动的直接影响[2]。定义
(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)

(16)
(17)
1.3 问题描述
(18)

(19)
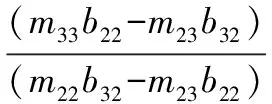
图1 基于前视距离的LOS导引策略原理图Fig.1 Diagram of LOS guidance based on lookahead distance
将式(9)和式(10)代入式(19)中,得
(20)

(21)

那么,式(20)可改写为
(22)
2 基于级联理论的USV路径跟踪控制律设计
2.1 级联系统
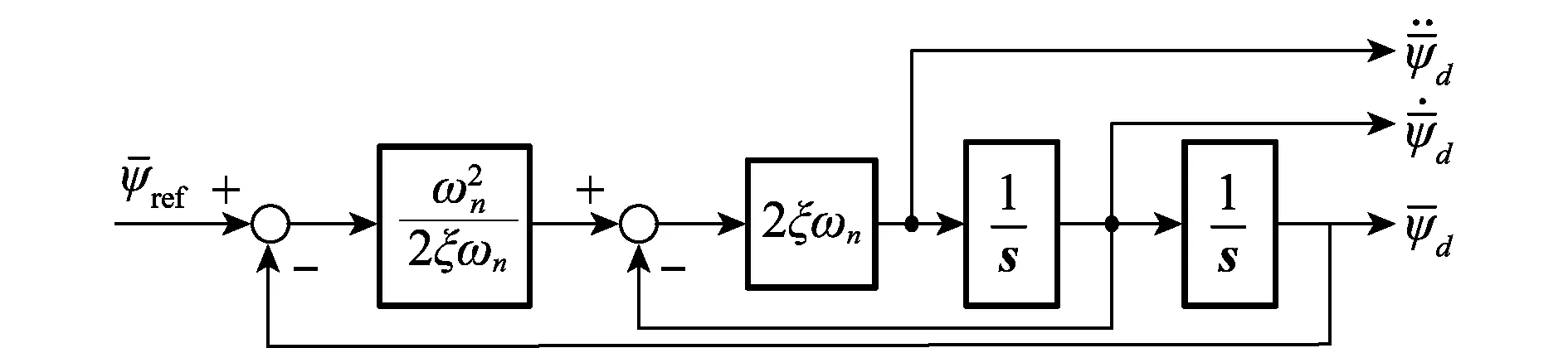
图2 二阶滤波器Fig.2 Second-order filter

(23)
(24)

(25)

(27)
此外,由三角函数知识可以得到
(28)
(29)
至此,根据式(22)、式(24)以及假设1,USV的路径跟踪位置误差可重写为

(30)
式中,sinβe≈βe;cosβe≈1。
(31)
式中,系统∑1由其标称系统∑1n和系统∑2对其的扰动构成。∑1n的表达式为
(32)
2.2 级联系统的控制器设计
(33)
式中,yint为虚拟控制输入,是一个积分项,用以补偿扰动侧滑角βe;Δ为前视距离,一般取Δ=nL,n≥1,L为船长。考虑到时变的前视距离可使得USV操纵更加灵活,即小的前视距离使USV快速地逼近期望航线,大的前视距离可减少位置误差的超调,基于该设计思想[10,14],定义
(34)
式中,σ1为严格大于0的常值参数;Δmax、Δmin分别为前视距离的最大和最小值,其选择要综合考虑船舶的操纵性能,通常情况下前视距离一般取2~15倍的船长[1]。
而由式(33)得

(35)
(36)
则位置误差动态方程可重写为
(37)

由于位置误差和前视距离是时变量,可取非自治的Lyapunov函数为
(38)

(39)
故可取虚拟控制律和自适应律为
(40)
(41)
式中,λ为积分增益。由文献[14]可知,固定积分增益可能会累积不必要的积分作用,产生积分饱和及超调现象,破坏控制系统的性能,故考虑设计时变的积分增益,定义
(42)
将式(40)、式(41)代入式(39)中,得
(43)
考虑扰动侧滑角的自适应估计误差动态,将系统式(31)重新整理为
(44)

(45)
(46)
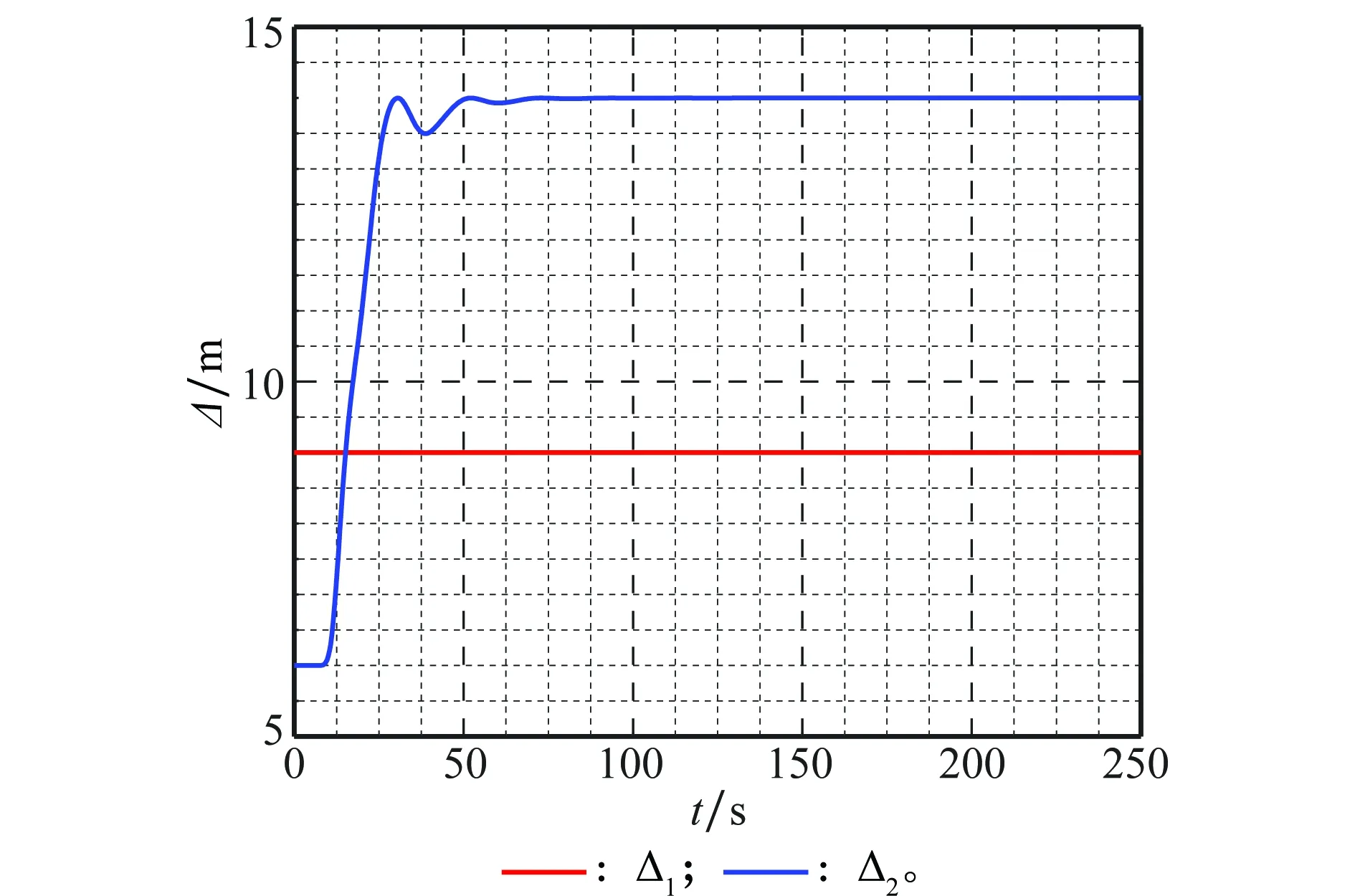
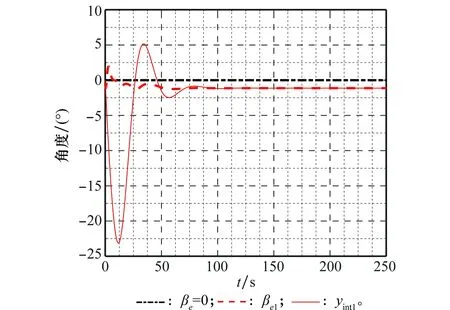
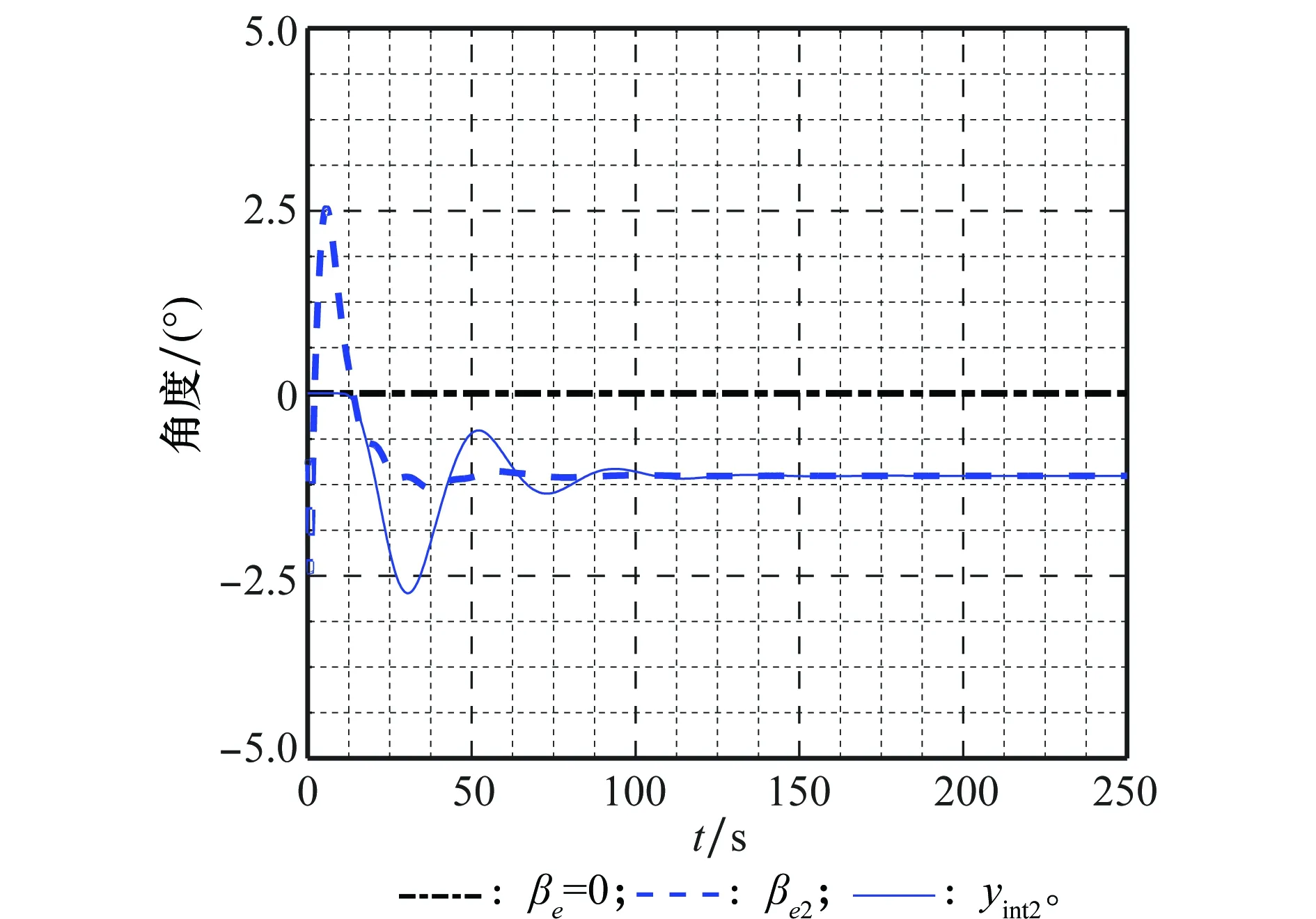
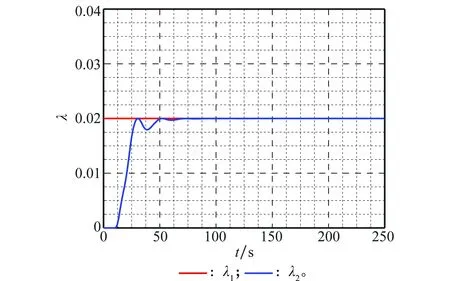
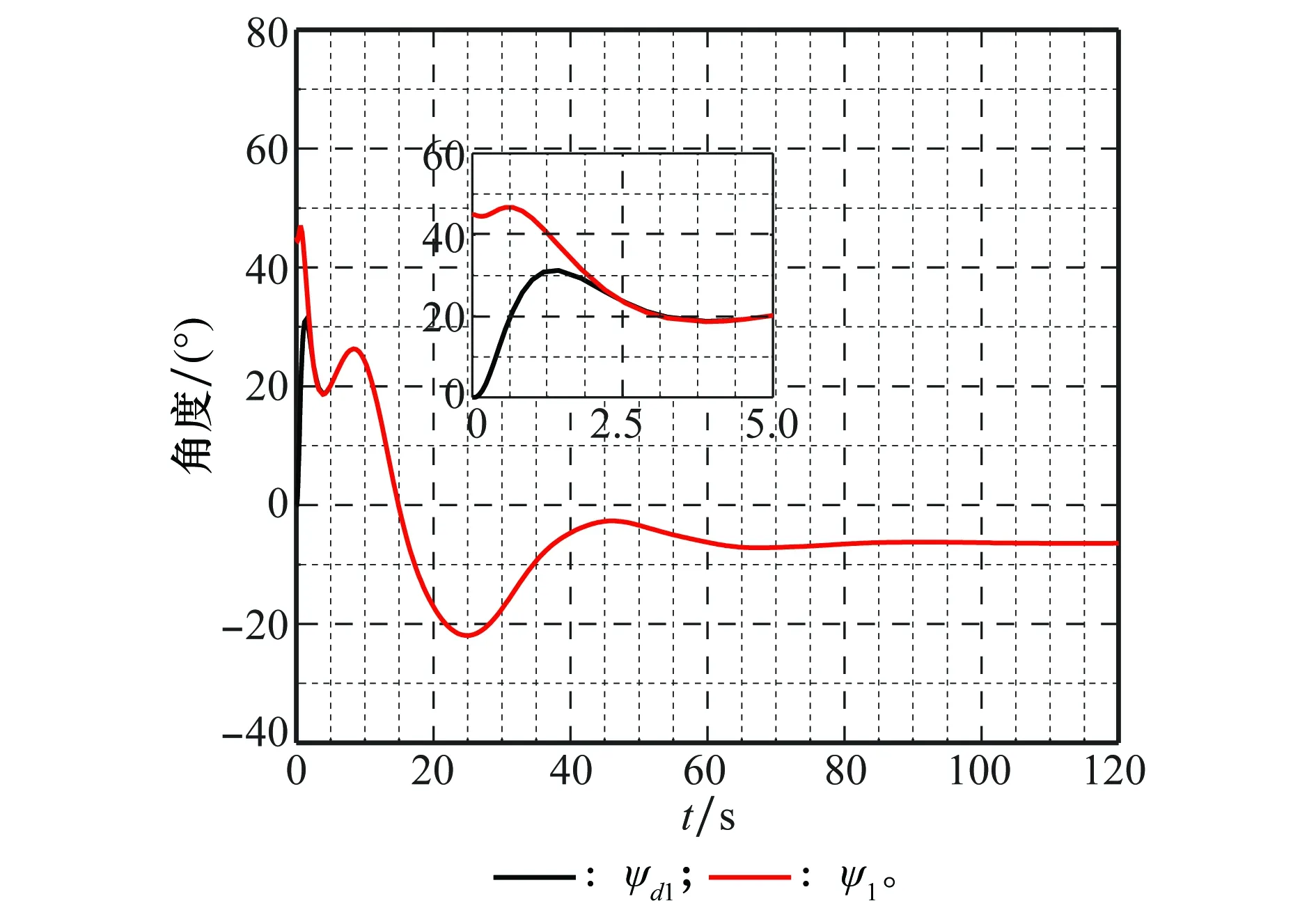
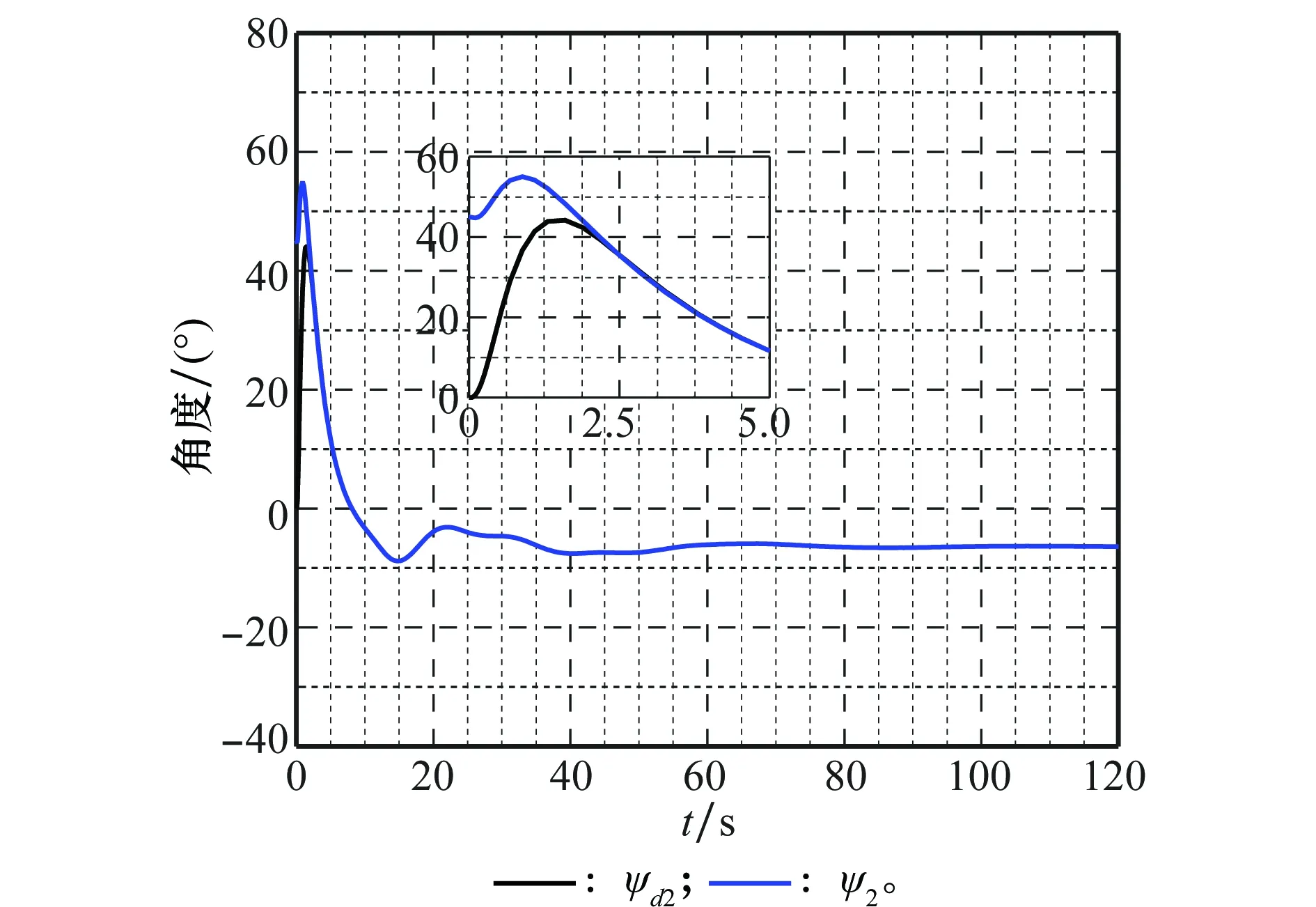
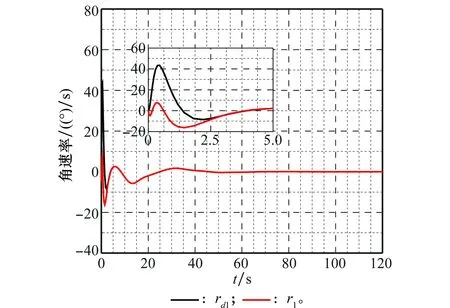
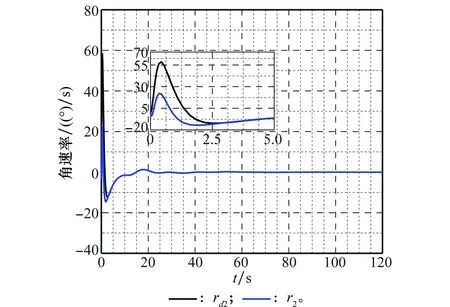
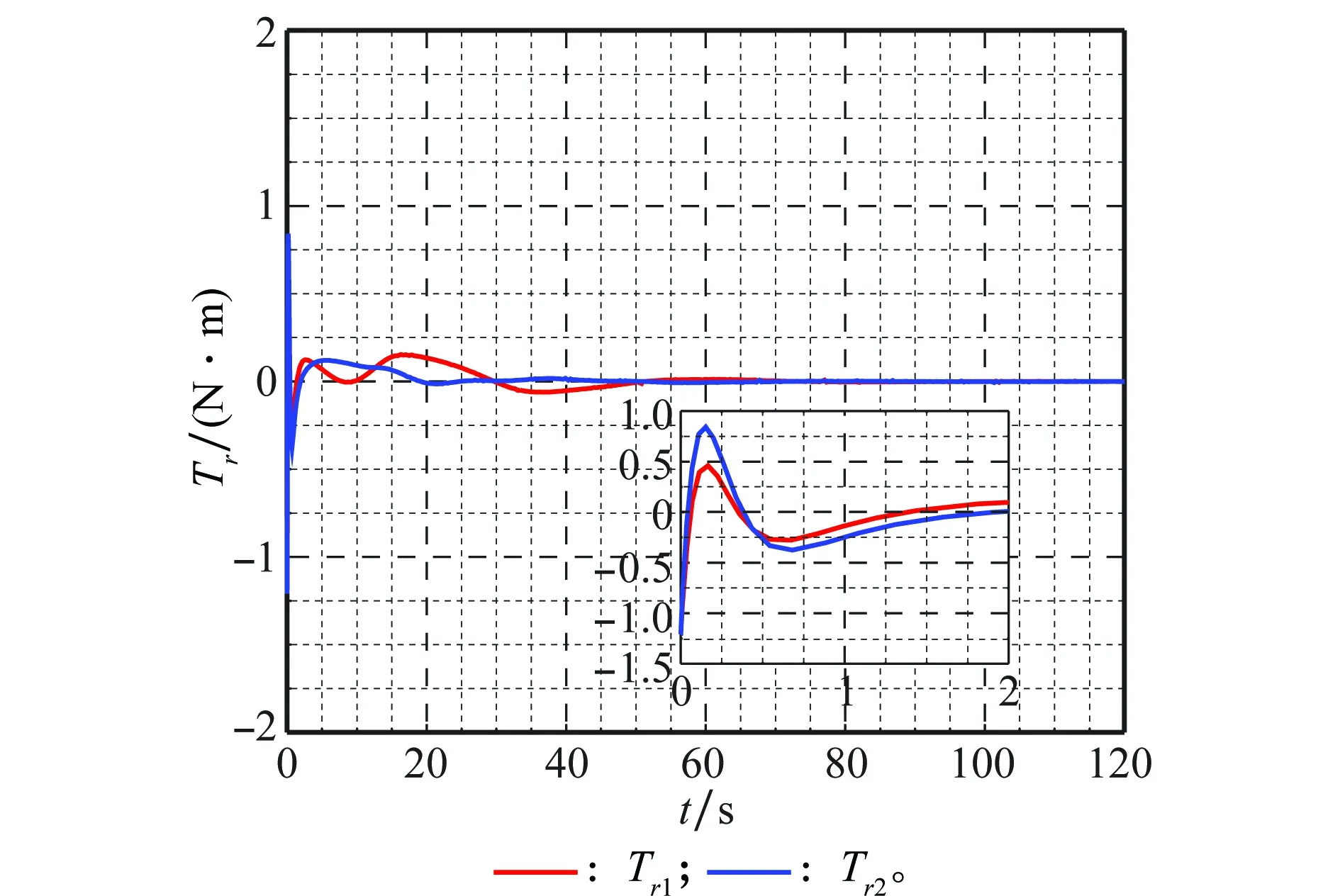
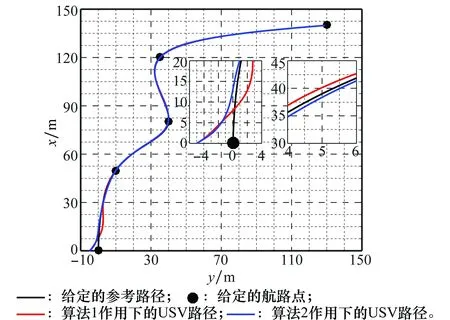
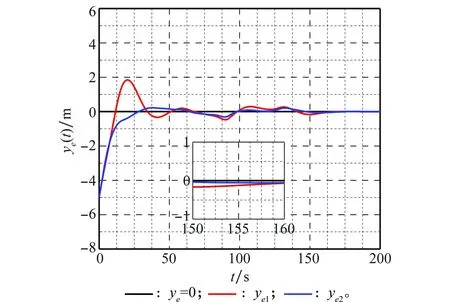
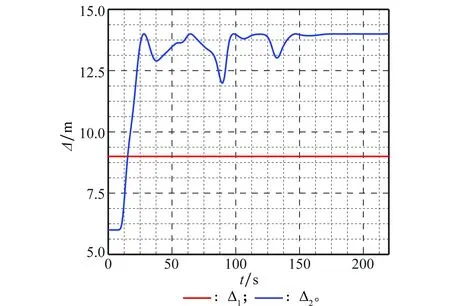
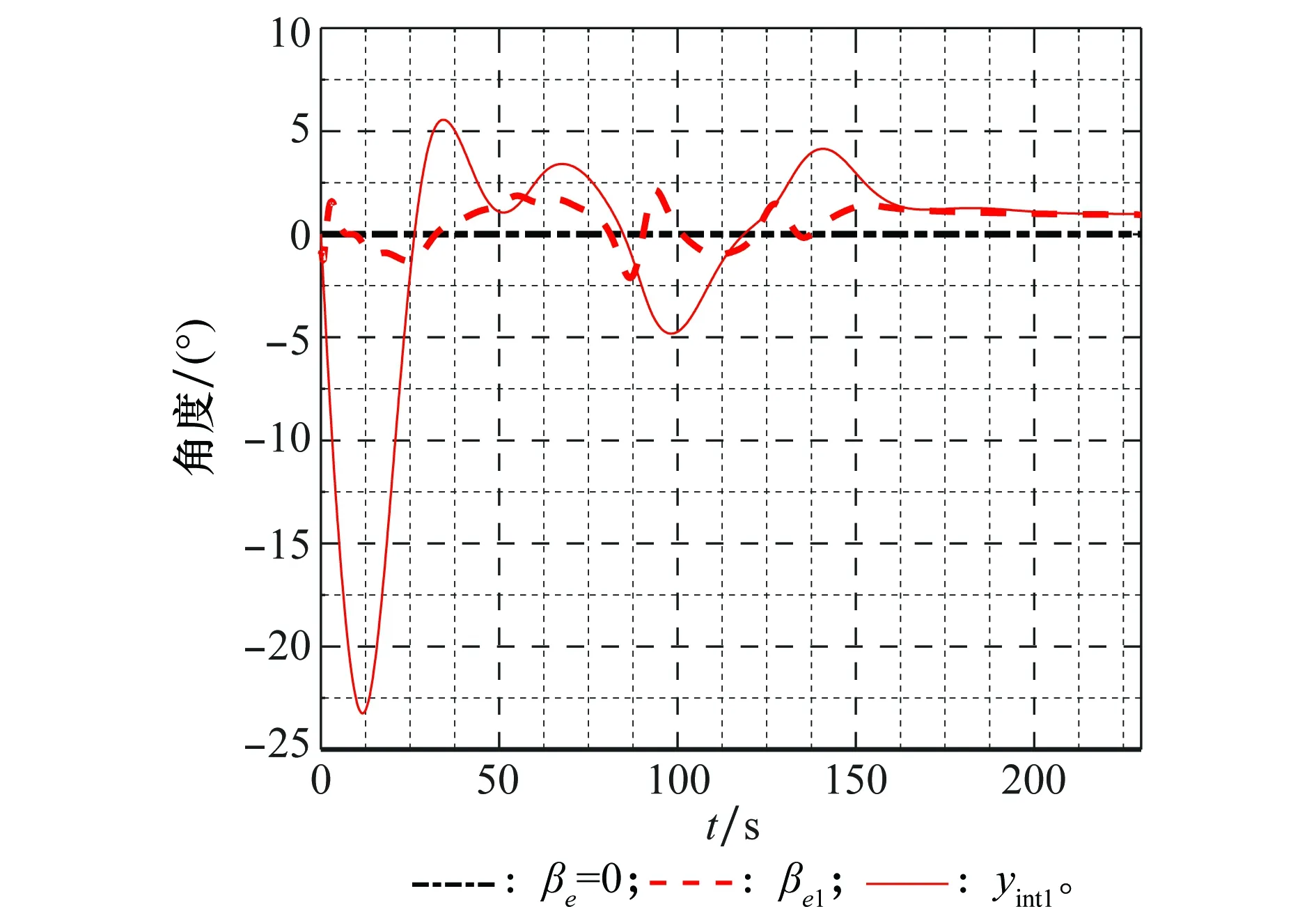
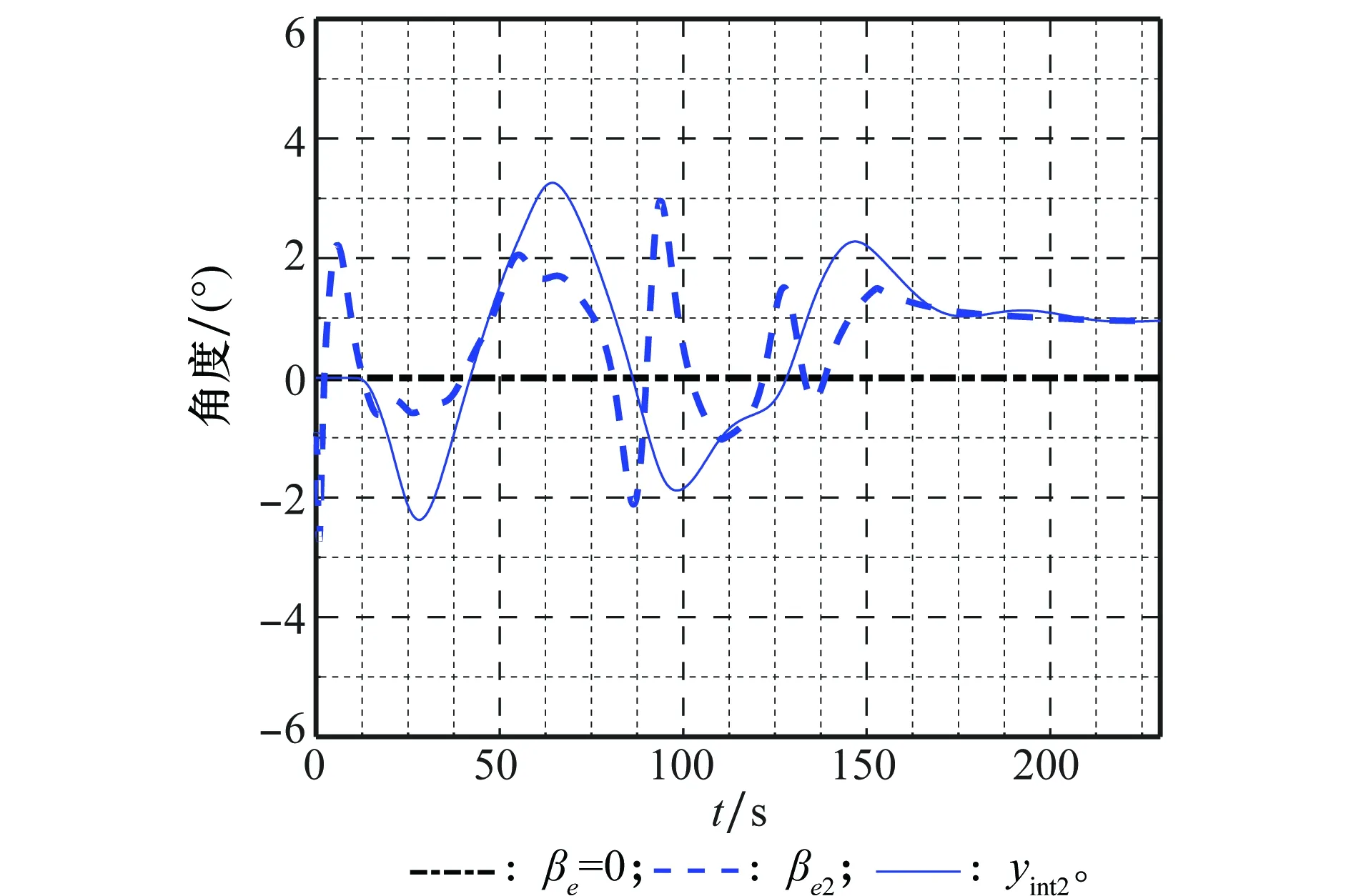
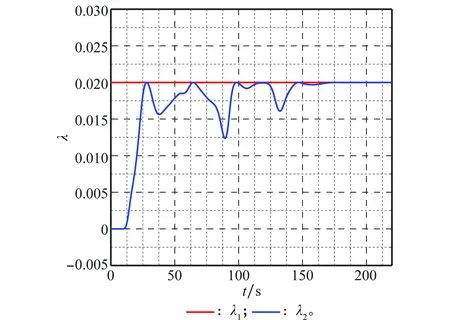
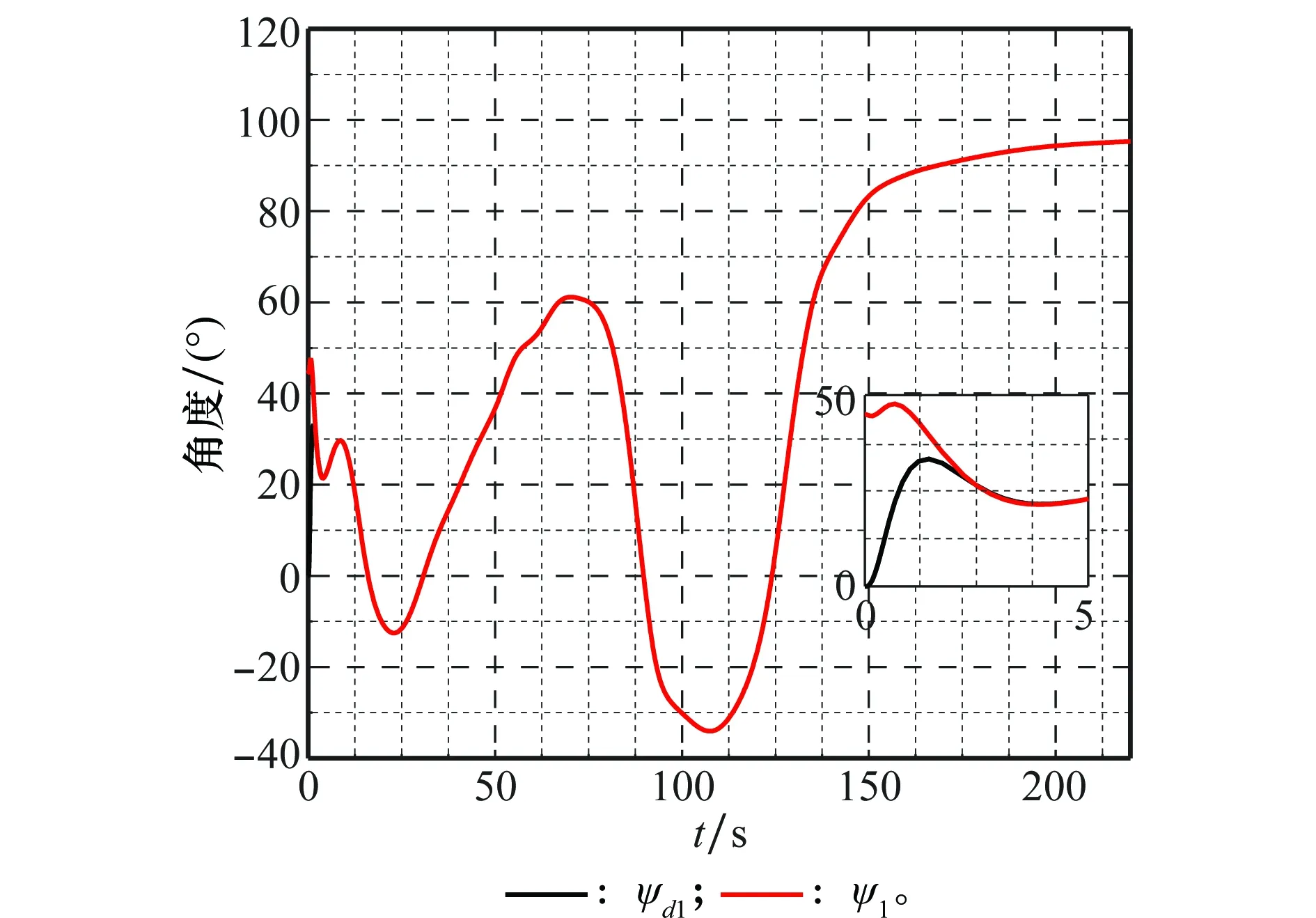
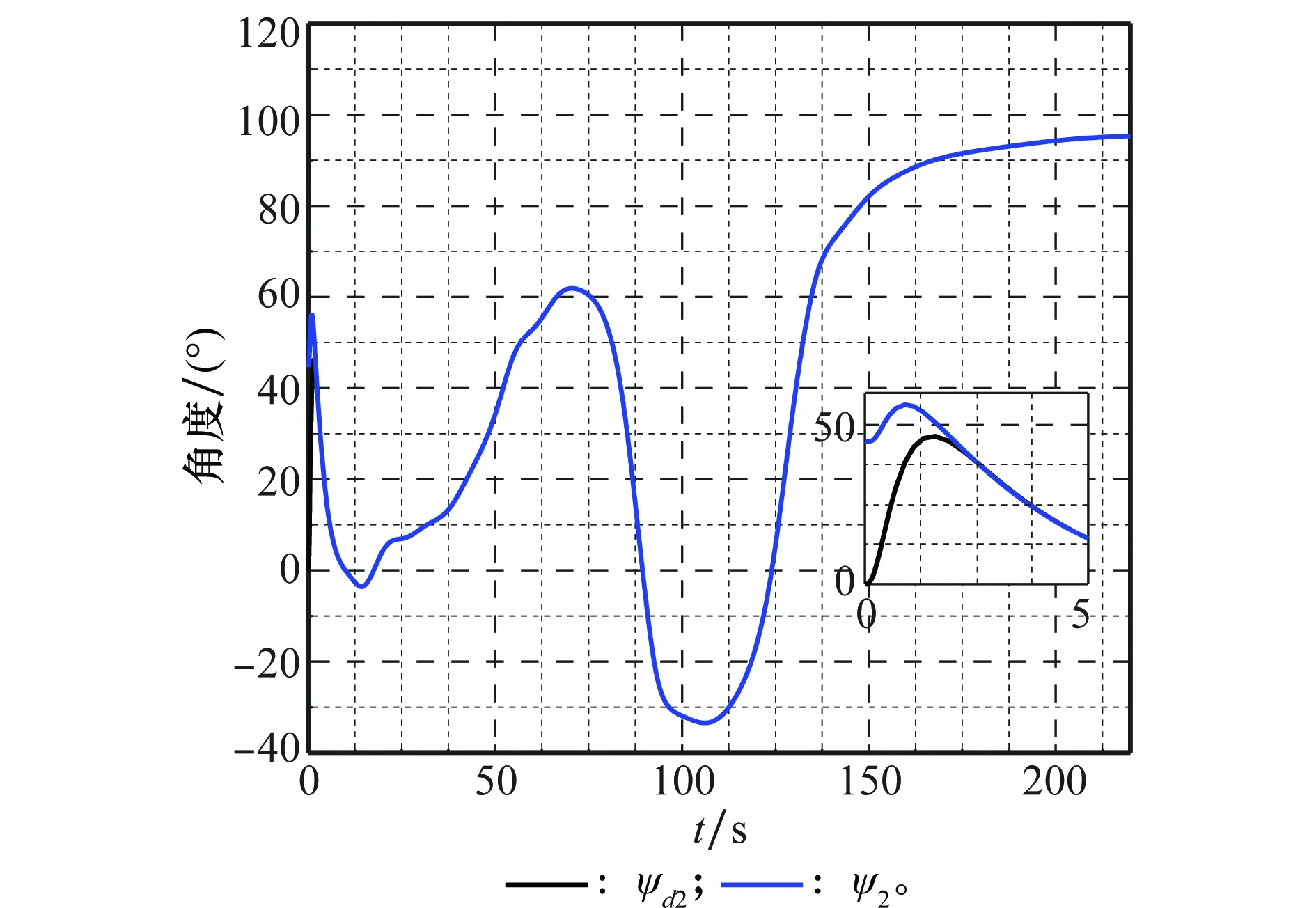
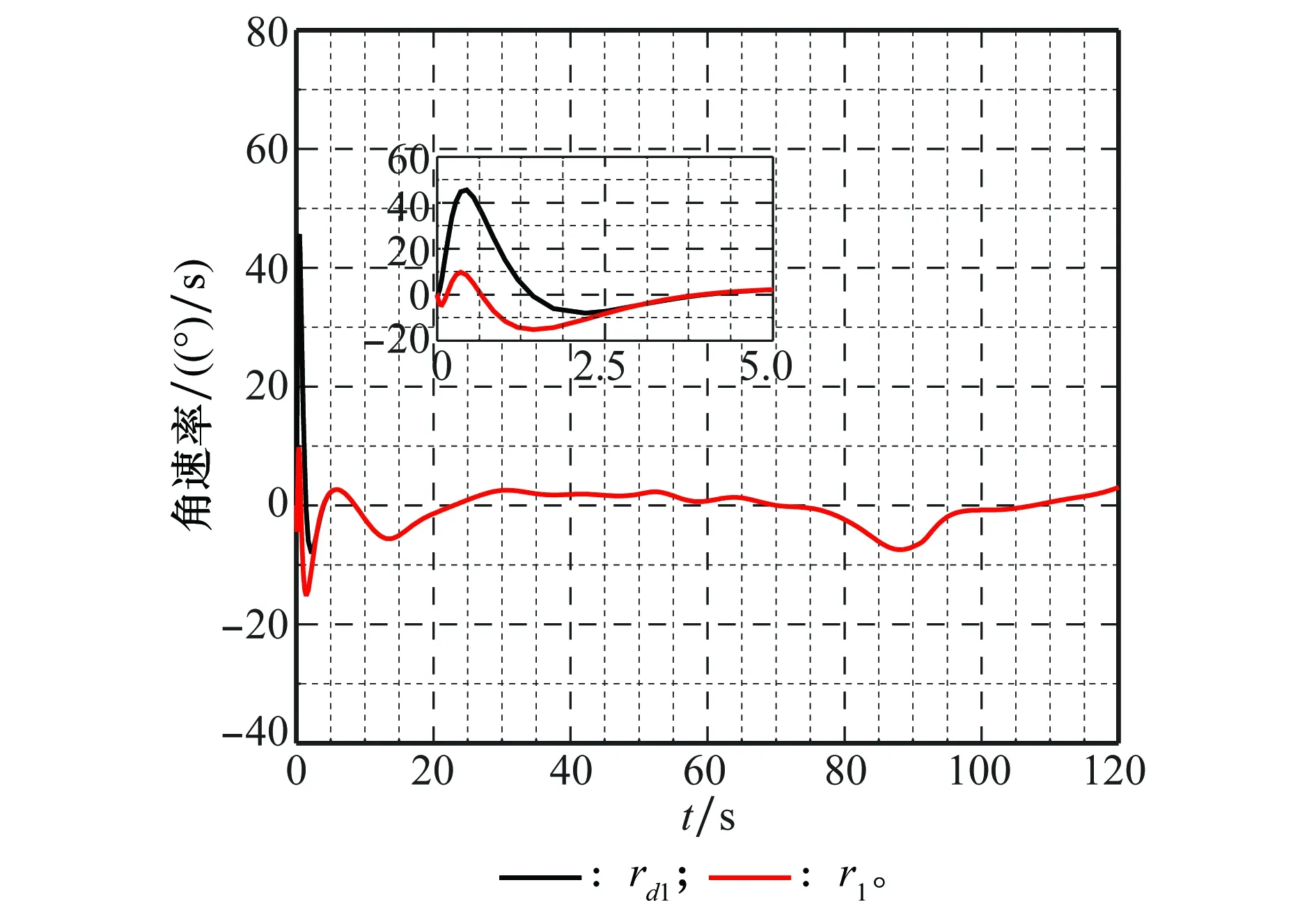
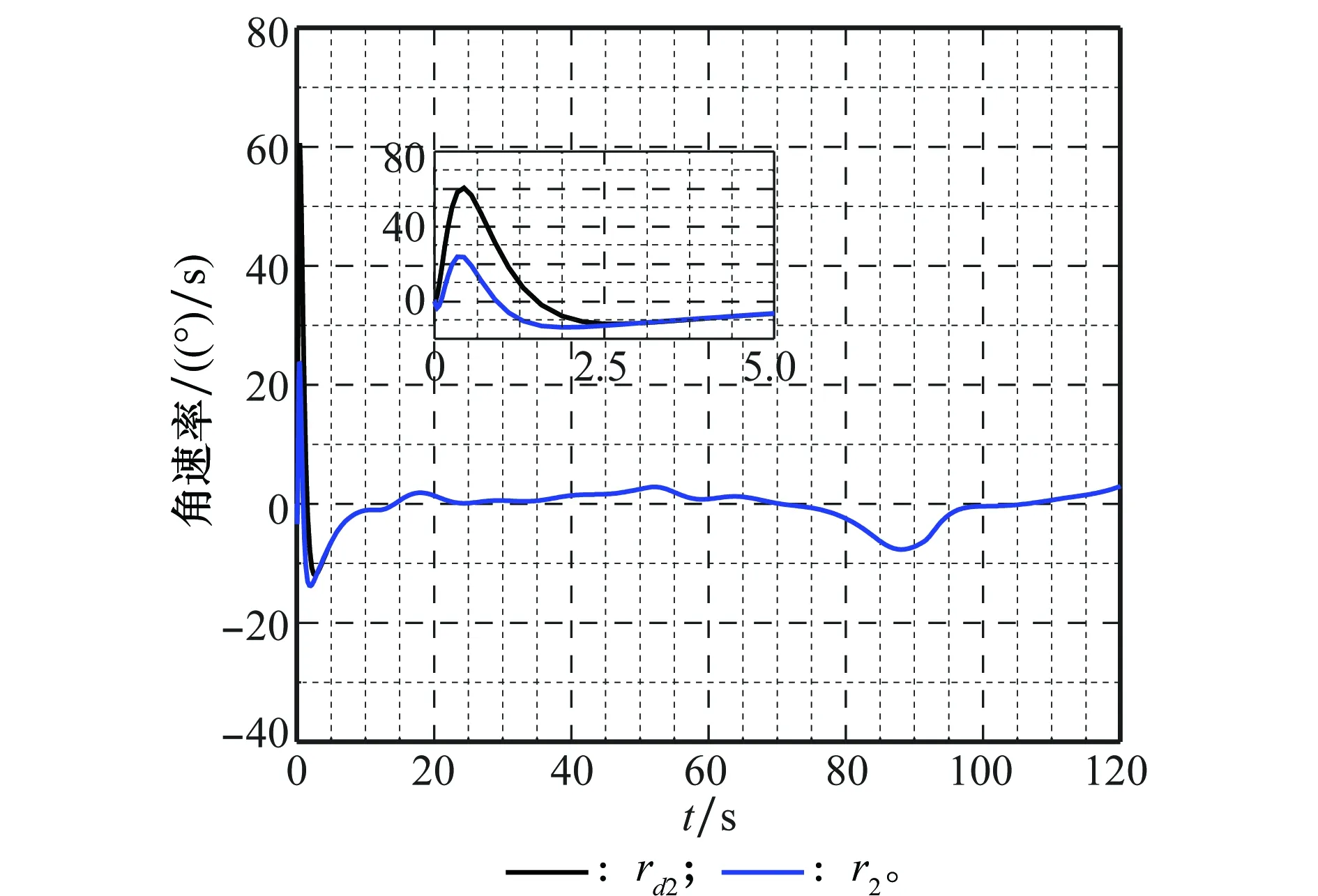
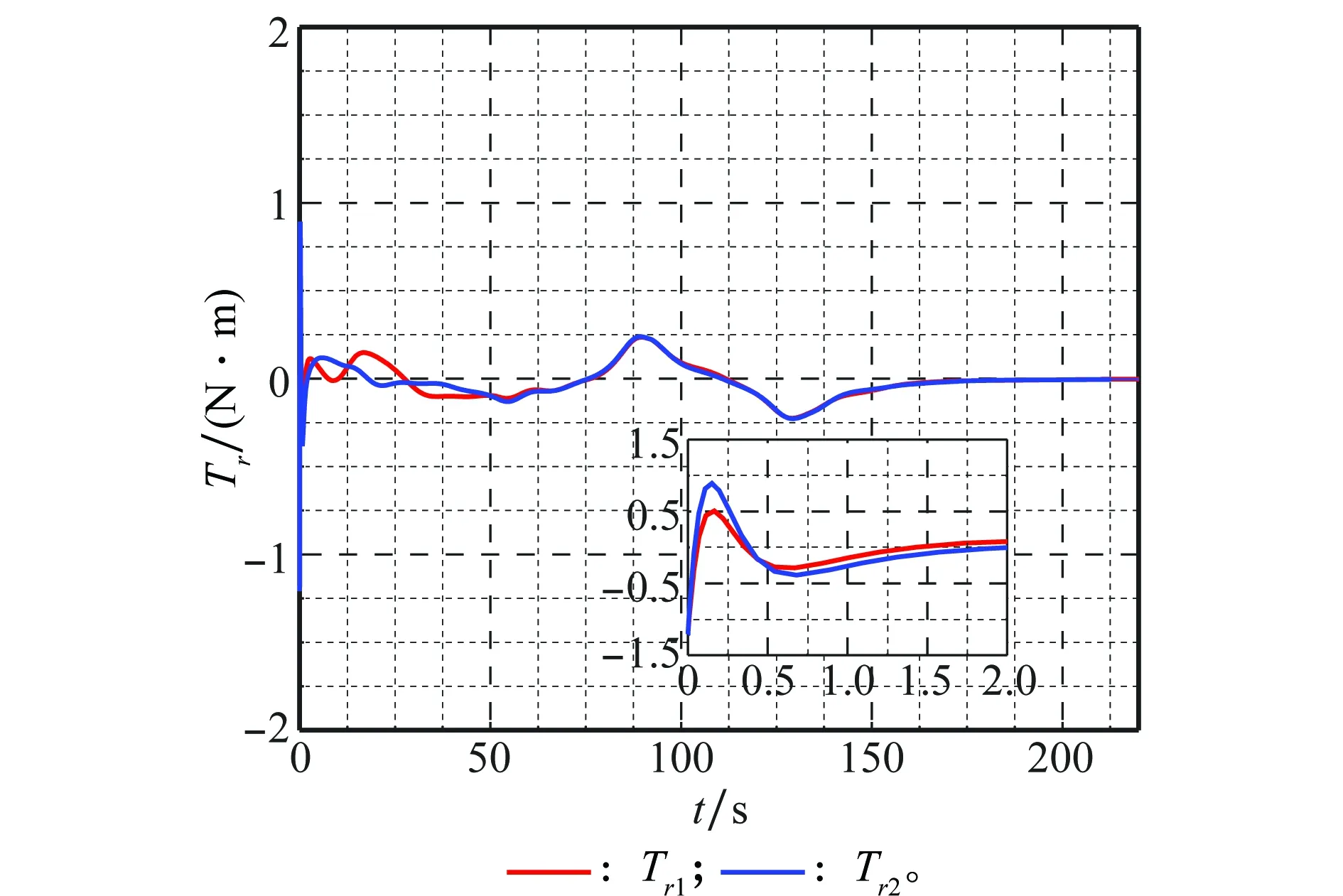
定义1系统称为一致半全局指数稳定(uniform semiglobal exponential stable, USGES),满足:对每一个r>0和所有的(t0,x(t0))∈R+×Br,存在k>0和γ>0,使得‖x(t)‖ 证明首先假定时变量Δ和λ为大于0的常数,之后讨论时变量Δ和λ对级联系统稳定性的影响。取非自治的Lyapunov函数为 (47) 对式(47)微分得 (48) 由式(47)和式(48)可得 ∀t≥t0 (49) 定义 (50) (51) (52) w(t)=e-2c*(r)(t-t0)v2(t0) (53) (54) (55) 最后,讨论时变参数Δ和积分增益λ对导引子系统稳定性的影响,具体如下: =c*(r), 证毕 步骤2考虑系统∑2。 采用反馈线性化比例微分控制方法设计艏向控制输入Tr,根据式(14)得 (56) 同理根据式(12)可得航速控制输入Tu为 (57) 将式(14)和式(56)代入系统∑2,则系统∑2可重写为 (58) 则系统式(44)可重新整理为 (59) 证毕 为验证本文提出的欠驱动USV自适应路径跟踪控制算法的有效性,以文献[18]中的模型为例,在Matlab/Simulink中进行仿真验证。USV模型具体参数如表1所示。 表1 USV模型参数 航速控制律式中,参数kur的设置:由于航速控制律利用动态反馈线性化比例控制进行设计,因此同样遵循PID参数整定的基本原则,即设置参数kur(等价于PID参数整定中的P环节)从0开始递增,当USV能够较快速地跟踪上给定的期望航速、震荡较小且达到较为满意的效果时,参数kur=4。 工况1期望航线为y=0,直线路径跟踪的仿真结果如图3~图13所示,其中,传统自适应ILOS导引路径跟踪算法(以下简称为算法1)和本文提出的路径跟踪控制算法(以下简称为算法2)分别对应变量下标为1和2的仿真结果。 图3 直线路径跟踪轨迹Fig.3 Straight path following 图4 横向误差的变化Fig.4 Varying of cross-track error 图5 前视距离的变化Fig.5 Varying of lookahead distance 图6 算法1下作用下的扰动侧滑角及其自适应估计值Fig.6 Sideslip angle and its adaptive estimation with algorithm 1 图7 算法2下作用下的扰动侧滑角及其自适应估计值Fig.7 Sideslip angle and its adaptive estimation with algorithm 2 由图3和图4可以看出,算法1和算法2分别在60 s和25 s时收敛到期望路径,相比算法1,算法2能够使得USV更快地收敛到计划航线,且没有大的超调行为,运动轨迹相对平滑;由图4可以看出,在算法2的控制作用下,USV路径跟踪过程中基本无超调行为,跟踪误差曲线较为平滑,而算法1存在较大超调现象,最大超调量约为2.3 m,这意味着算法2能够使USV有更好的航迹保持能力。这是由于算法2使得USV在距离计划航线较远时能够快速逼近计划航线,而在距离计划航线较近时,平缓的靠近计划航线,这与图5中算法2对应的时变前视距离的变化情况是一致的。时变的前视距离带给USV更加灵活的操纵性能,当USV距离计划航线较近时,控制器自适应选择较小的前视距离,以使得USV快速逼近计划航线;当USV距离计划航线较远时,控制器中选择大的前视距离,使得USV平缓靠近计划航线,避免明显的超调行为。 图8 积分增益的变化Fig.8 Varying of integral gains 图9 算法1作用下滤波后的期望艏向角及艏向角的变化Fig.9 Varying of expected heading angle after filtering andactual heading angle with algorithm 1 图10 算法2作用下滤波后的期望艏向角及艏向角的变化Fig.10 Varying of expected heading angle after filtering and actual heading angle with algorithm 2 图11 算法1作用下滤波后的期望艏向角速率及艏向角速率的变化Fig.11 Varying of expected heading angle rate after filtering and actual heading angle rate with algorithm 1 图12 算法2作用下滤波后的期望艏向角速率及艏向角速率的变化Fig.12 Varying of expected heading angle rate after filtering andactual heading angle rate with algorithm 2 图13 艏摇力矩控制输入Fig.13 Control input of heading angle moment 图6和图7给出了扰动漂角及其自适应估计值,可以看出,两种算法均能够有效地估计缓慢时变的扰动漂角,且相比算法1,算法2对扰动侧滑角的自适应估计值更为精确。由图7可以看出,算法2在时间约12 s(对应位置误差约为-0.8 m)后才开始对扰动侧滑角进行自适应估计并补偿,即USV在距离计划航线较近时才让算法中的虚拟控制律(即积分环节)起作用,而算法1中的固定积分增益使得积分作用在距离计划航线较远的初始阶段就开始累积,可能会引起积分饱和及超调现象,这与图8中两种算法积分增益的变化情况是一致的,因此算法2可有效避免积分饱和及超调行为。 图9~图12分别给出了USV滤波后的期望艏向角(角速率)及其艏向角(角速率)的变化情况,可以看出,在两种控制算法的作用下,艏向角及其艏向角速率都能够快速收敛到相应的期望值,且算法2对应的艏向及其角速率曲线更为平滑。图13中给出了USV航行过程中偏航力矩的变化情况,可以看出,两种算法中所需的偏航力矩均没有超过其限制值(2N),但相比算法1,算法2所需的偏航力矩在多数时间内都更小,这意味着算法2使用较小的能量就能够完成转艏和艏向镇定任务,这对USV续航能力的提高具有十分重要的现实意义。 工况2给定5个航路点(0,0)、(50,10)、(80,40)、(120,35)、(140,130),利用3次样条插值算法获得一条连续的计划航线,曲线路径的跟踪仿真结果如图14~图24所示。 图14 曲线路径跟踪轨迹Fig.14 Curve path following 图15 横向误差的变化Fig.15 Varying of cross-track error 图16 前视距离的变化Fig.16 Varying of lookahead distance 图17 算法1下作用下的扰动侧滑角及其自适应估计值Fig.17 Sideslip angle and its adaptive estimation with algorithm 1 图18 算法2下作用下的扰动侧滑角及其自适应估计值Fig.18 Sideslip angle and its adaptive estimation with algorithm 2 图14和图15给出了两种算法作用下USV的航行轨迹和位置跟踪误差,可以看出,在两种算法作用下,USV在航路点附近时位置误差都出现了超调现象,算法1最大超调量为2 m,算法2最大超调量为0.2 m,且算法1在50 s时震荡行为减小,算法2在整个跟踪过程中震荡幅度较小,约为0.4 m,相比算法1,算法2作用下的USV航行轨迹更为平滑,位置误差超调也更小,这意味着算法2使得USV具有更好的航迹保持能力。图18中,算法2也是大约在12 s(对应位置误差约为-0.9 m)后才开始对扰动漂角进行自适应估计并补偿,其与图19的分析与工况1类似。 图19 积分增益的变化Fig.19 Varying of integral gains 图20 算法1作用下滤波后的期望艏向角及艏向角的变化Fig.20 Varying of expected heading angle after filtering andactual heading angle with algorithm 1 图21 算法2作用下滤波后的期望艏向角及艏向角的变化Fig.21 Varying of expected heading angle after filtering andactual heading angle with algorithm 2 图22 算法1作用下滤波后的期望艏向角速率及艏向角速率的变化Fig.22 Varying of expected heading angle rate after filtering andactual heading angle rate with algorithm 1 图23 算法2作用下滤波后的期望艏向角速率及艏向角速率的变化Fig.23 Varying of expected heading angle rate after filtering andactual heading angle rate with algorithm 2 图24 艏摇力矩控制输入Fig.24 Control input of heading angle moment 由图20~图23可以看出,两种控制算法的艏向角及其艏向角速率都能够快速收敛到相应的期望值,且在仿真初始阶段,算法2对应的艏向及其角速率曲线则更为平滑;从图24中可以看出,偏航力矩在仿真时间0~50 s的分析与工况1相同,而50 s后两种算法所需的偏航力矩相差很小。 (1)针对海流等外界环境干扰下欠驱动USV的路径跟踪问题,提出一种基于非对称模型的改进的自适应控制算法,其中自适应位置误差和期望艏向角控制律中前视距离和积分增益都是以位置误差为函数的时变量,自适应估计并补偿外界扰动造成的侧滑角,可有效避免积分饱和以及超调现象。 (2)基于级联系统理论和李雅普诺夫理论证明了当所有控制目标实现时,控制系统为USGES和UGAS。 (3) 通过与传统的ILOS导引路径跟踪算法进行仿真实验对比分析可以看出,文中所提出的改进的自适应控制算法具有更好的路径跟踪效果和动态性能,具有一定的先进性。 [1] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Hudson County, New Jersey: Wiley, 2011. [2] MOE S, PETTERSEN K Y, FOSSEN T I, et al. Line-of-sight curved path following for under-actuated USVs and AUVs in the horizontal plane under the influence of ocean currents[C]∥Proc.of the Mediterranean Conference on Control and Automation, 2016: 38-45. [3] CAHARIJA W, PETTERSEN K Y, SØRENSEN A J, et al. Relative velocity control and integral LOS for path following of autonomous surface vessels: merging intuition with theory[J]. Engineering for the Marine Environment, 2014, 228(2): 180-191. [4] 范云生,郭晨,赵永生,等. 时变漂角下USV直线路径跟踪控制器设计与验证[J]. 仪器仪表学报, 2016, 37(11): 2514-2520. FAN Y S, GUO C, ZHAO Y S, et al. Design and verification of straight line path following controller for USV with time-varying drift angle[J]. Chinese Journal of Scientific Instrument, 2016, 37(11): 2514-2520. [5] ZHU J, WANG J H, ZHENG T Q, et al. Straight path following of unmanned surface vehicle under flow disturbance[J]. IEEE Ocean, 2016 , 32(3): 20-28. [6] FOSSEN T I, LEKKAS A M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control and Signal Processing, 2015, 28(3): 20-35. [7] 王常顺,肖海荣. 基于自抗扰控制的水面无人艇路径跟踪控制器[J]. 山东大学学报(工学版), 2016, 46(4): 54-59, 75. WANG C S, XIAO H R. Path following controller for unmanned surface vessels based on ADRC[J]. Journal of Shandong University (Engineering Science), 2016, 46(4): 54-59, 75. [8] 田勇,王丹,彭周华,等. 无人水面艇直线航迹跟踪控制器的设计与验证[J]. 大连海事大学学报,2015 , 41(4):14-18. TIAN Y, WANG D, PENG Z H, et al. Design and validation of path tracking controller for USV along straight-lines[J]. Journal of Dalian Maritime University, 2015, 41(4): 14-18. [9] BORHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents[C]∥Proc.of the 47th IEEE Conference on Decision and Control, 2008: 4984-4991. [10] FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J].IEEE Trans.on Control Systems Technology, 2015, 23(2): 820-827. [11] LEKKAS A M, FOSSEN T I. Integral LOS path following for curved paths based on a monotone cubic Hermite spline parameter ization[J]. IEEE Trans.on Control Systems Technology, 2014, 22(6): 2287-2301. [12] GHOMMAN J, MNIF F, BEHAL A, et al. Nonsingular secret-frenet based path following control for an underactuated surface vessel[J]. Journal of Dynamic Systems Measurement and Control, 2009, 131(2): 211-216. [13] CAHARIJA W. Relative velocity control and integral LOS for path following of underactuated surface vessels[C]∥Proc.of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft, 2012: 380-385. [14] 王浩铎,王钦若,吴小泽. 船舶全局一致渐进路径跟踪变积分增益导航策略[J]. 控制理论与应用, 2015, 32(6): 849-856. WANG H Y, WANG Q R, WU X Z. Uniformly globally asymptotically stable path following with integral gain-variable guidance law for ships[J]. Control Theory & Applications, 2015, 32(6): 849-856. [15] FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Trans.on Control Systems Technology, 2015, 23(2): 820-827. [16] FOSSEN T I, PETTERSEN K Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws[J]. Automatica, 2014, 50(11): 2912-2917. [17] LORIA A, PANTELEY E. Cascaded nonlinear time-varying systems: analysis and design[M]∥LAMNABHI-LAGARRIGUE F, LORIA A, Panteley E, ed. Advanced Topics in Control Systems Theory. New York: Springer-Verlag, 2004: 23-64. [18] BREIVIK M. Nonlinear maneuvering control of underactuated ships[D]. Norway: University of Science and Technology, 2003.







3 仿真实验

4 结 论
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
数学物理学报(2019年4期)2019-10-10 02:38:56
制造技术与机床(2017年6期)2018-01-19 02:41:07
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
太空探索(2016年5期)2016-07-12 15:17:58
太空探索(2016年6期)2016-07-10 12:09:06
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
