新型脊柱定位仪在椎弓根螺钉植入手术中的应用研究
2018-01-11 02:07王作伟吴浩陈赞王兴文袁庆国菅凤增
中华神经外科疾病研究杂志 2017年6期
王作伟 吴浩 陈赞 王兴文 袁庆国 菅凤增
(1北京医院神经外科,北京 100730; 2首都医科大学宣武医院神经外科,北京 100053)
脊柱微创手术近年来得到了快速发展,愈来愈多的微创手术代替了传统的开放手术。很多脊柱微创手术的关键步骤是穿刺定位,如:微创经椎间孔腰椎椎体间融合术,(minimally invasive transforaminal lumbar interbody fusion, MIS-TLIF)[1],脊柱内窥镜手术[2],椎体成形术(percutaneous vertebroplasty, PVP)[3]等,穿刺定位的成功与否往往是决定手术成败的关键。但是,即使具备丰富临床穿刺经验的脊柱外科医师也常常遇到穿刺困难的问题。所以,如何提高穿刺成功率、缩短手术时间、减少医师与患者X线的接触量、提高手术效率是一直以来的研究方向。
为了提高脊柱微创手术的准确性,使手术更加安全,作者团队自行设计制作了一种简单、经济的脊柱定位仪,并研制了配套的相关软件。本文介绍了定位仪的构造,通过脊柱尸体标本椎弓根穿刺试验验证了定位仪的定位准确性与实用性。
对象与方法
一、定位仪的结构原理和构造
空间两点决定一条直线。如果把脊柱穿刺针穿刺的轨迹看成一条直线的话,根据这条线上任意两个不重叠的点就能确定这条直线。如果这两个点设定为穿刺起始点和穿刺终止点,就可以确定穿刺线的方程,进一步计算出穿刺点坐标、穿刺方向和穿刺深度。这样就把穿刺的问题转化成了在三维坐标系的数学计算问题。
根据以上原理,我们需要利用定位仪确定穿刺线上两点的坐标,然后计算出穿刺线的方程,其他穿刺点的坐标也就可以计算出来了。整个计算过程由自主研制的软件完成,只需要输入两点坐标即可。定位仪的主要构造包括可以在X线下读出参数的标尺部分以及可以确定方向的穿刺部分(图1)。

图1 脊柱微创定位仪的结构图
Fig 1 The structural drawing and photo of spinal location system
The main structures of spinal location system included: bracing system, coordinate measurement system and puncturing system.
二、定位仪使用方法
脊柱微创定位仪的使用包括以下主要步骤(图2):固定脊柱定位仪(图2A);沿x轴方向拍摄脊柱正位X光(图2B),根据标尺记录位于椎骨表面上的第一穿刺点和位于椎骨深部的第二穿刺点在y-z平面内的第一位置坐标信息;沿y轴方向拍摄脊柱侧位X光(图2C),记录第一穿刺点和第二穿刺点在x-z平面内的第二位置坐标信息;将第一位置信息和第二位置坐标信息输入配套软件,计算出穿刺的方向、角度和深度(图2D);根据得出的参数调整脊柱微创定位仪参数,使得穿刺针与定位的方向和角度一致,进行穿刺(图2E);穿刺完成(图2F)。
三、一般材料
选择4具T2-S1背部结构(皮肤软组织)完整的成人脊柱尸体标本,其中3男1女,年龄约30~50岁(具体不详),经过死亡原因调查、肉眼观察及穿刺前放射学检查无胸腰椎相关病疾病,未见明显的胸腰椎与椎间隙形态学改变。每具标本可提供双侧L1-S1共12个椎弓根穿刺定位,一共进行穿刺48次。
穿刺前标本行脊柱电子计算机断层扫描(computed tomography, CT)及X线检查。
四、穿刺方法
穿刺过程与定位仪使用方法基本相同。
椎弓根穿刺试验中,我们选用了椎弓根的外缘点及内缘点作为第一和第二穿刺点。这两个点的坐标可以在标尺中直接获得。
在X光片中读出第一、二穿刺点坐标值后,重要的步骤是对坐标值进行修订。因为C型臂照射的X线并不是平行的,所以需要对数值进行修订。在本实验中,我们利用椎体的高度来修正数值。我们在穿刺前椎体的CT扫描已经得到了椎体的长宽高数值,使用这个椎体CT数值作为标准对坐标系中读出的数值作修订。放大(或缩小)率=坐标系中椎体高度(或者长、宽)/CT测量的椎体高度(或者长、宽),再利用放大率对坐标数值进行修订。同时,在标记点位置放置一把刻度尺,对标尺的校对进行检验。
将修订后的标准坐标数值输入到计算软件中,得出穿刺起始点坐标、穿刺方向,调整定位仪参数,开始穿刺。本实验选用的穿刺针为克氏针。穿刺针穿刺到达几个穿刺关键点时,进针的距离应该和预先计算出的数值相吻合,可以对穿刺的准确性进行验证。
五、观察指标
1.穿刺偏差数值:在X光正、侧位片上标出椎弓根外缘、内缘理想的穿刺点,测量实际穿刺点与理想穿刺点的偏差距离,正侧位X光片上最大偏差数值为最终偏差数值(图3)。

图2 定位仪使用方法
Fig 2 The using of spinal location system
A: The spinal location system was fixed on the surgical bed; B, C: In the anteroposterior and lateral view, the first and second key point were identified (black symbols); D: The data was input into the corresponding software, and the result of parameter was gained; E: The puncture was performed according to fixed parameter; F: The puncture location was satisfactory.
图3 在正侧位透视下,测量理想的穿刺点(图中黑点位置)与实际的穿刺点之间的距离
Fig 3 In the anteroposterior and lateral view,the distances between the planned and actual puncture points on pedicles were measured
2.穿刺优良率:采用改良Richter分类标准。对于螺钉植入的评判, Richter分类标准[4]将其分为3类,因为在本实验中并未实际植入螺钉,所以采用改良方法。根据腰椎螺钉的直径(选用5 mm)及椎弓根直径(选用椎弓根长径14~16 mm,短径8~15 mm的标准[5]),将Richter分类进行改良,根据椎弓根穿刺点的偏差,将穿刺效果其分为三类:①优:偏差小于3 mm;②良:偏差大于或等于3 mm、小于5 mm;③差:偏差大于或等于5 mm。
六、统计学方法
应用SPSS 17.0软件(SPSS software, Version 17.0; SPSS, Inc., Chicago, Illinois)计算椎弓根实际穿刺点与理想穿刺点的距离偏差的均数,并计算穿刺优良率的百分比。
结 果
椎弓根外缘穿刺点与理想穿刺点的偏差距离在正位片上为:0~6.0 mm,平均(1.8±1.5) mm;侧位片上为:0~7.0 mm,平均(1.6±1.5) mm。椎弓根内缘穿刺点与理想穿刺点的偏差距离为在正位片上为:0~6.4 mm,平均(2.0±1.6) mm;侧位片上为:0~7.3 mm,平均(1.9±1.6) mm。穿刺点在椎弓根上的最大偏差距离为:0~7.3 mm,平均(2.4±1.6) mm。穿刺点误差位置见图4。根据最大偏差距离得出穿刺结果,优:34例(70.8%);良:10例(20.8%);差:4例(8.3%),优良率为91.7%。
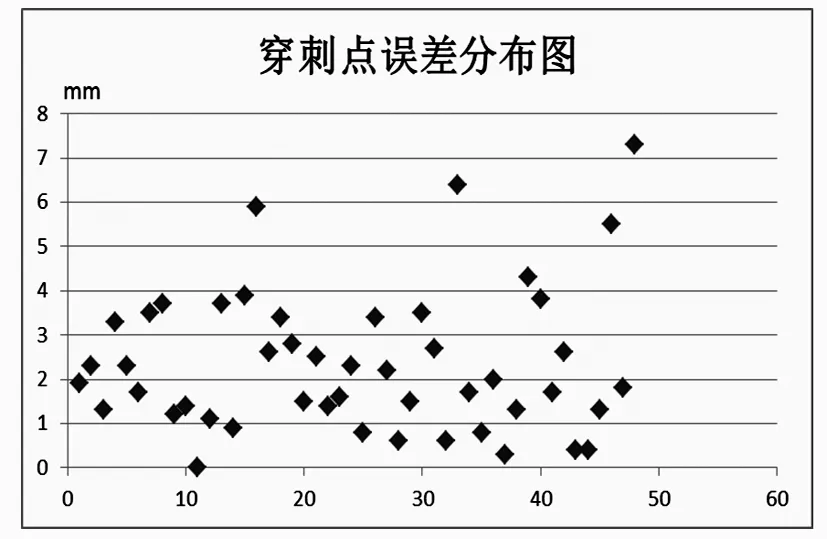
图4 穿刺点误差值分布
Fig 4 The puncture distance deviation distribution map
讨 论
近年来,脊柱微创手术得到了快速发展,正越来越深刻地改变着医生和患者对脊柱疾病治疗的认识[6-7]。微创手术极大地减小了手术的创伤,但是这些微创手术都离不开精确的穿刺定位,穿刺的失败就意味着整个手术的失败。所以,人们希望借助各种工具来提高微创手术穿刺的准确性。
导航和机器人的应用使脊柱微创手术的穿刺定位更加准确,无论给医生还是患者都带来了很大的益处[8-9]。但是导航及机器人系统也会带来手术误差,而且造价昂贵、操作复杂,暂时难以推广。有一些研究致力设计造价便宜、简易实用的定位仪,用于脊柱手术穿刺定位,有的定位仪已经进行了临床应用,并取得了较好的效果[10-14],但是这些定位仪也存在着一些应用范围较小、误差偏大、操作不便等缺点,在实际工作中应用还存在着一些困难。
针对现状,我们希望研制一种脊柱定位仪,能够提高穿刺成功率、缩短手术时间、减少放射线的暴露、提高手术效率。我们希望能把这种定位仪能广泛应用于脊柱手术当中,本试验首先在腰椎椎弓根穿刺手术中对定位仪进行验证。
为了确定穿刺线,首先需要确定穿刺线上的两个标记点。我们在实验中选用了椎弓根的外缘点及内缘点作为第一和第二标记点,这两个点的解剖结构在X光片正侧位都可以比较清晰地显示。无论我们选择哪两个点作为标记点,这两个点都必须在X光上解剖结构明确,一旦两个点确定了,整个穿刺线也就确定了。
有了两个确定的标记点,就需要获得这两点的坐标,我们在定位仪中设计了可以读取度数的坐标尺。标记点的坐标可以在坐标尺中读出。这时就遇到了一个很大的问题,C型臂X光并不是平行光,而是锥形光,也就是说物体的成像是变形的,对于单个椎体较小的变形可以忽略不计,而坐标尺成像变形对数据的影响就比较大。这种图形的变形需要进行修正才能够引用在脊柱定位中。在本研究中利用术前CT的测量作为标准,对标尺的数据进行修订,同时也在标记点位置添加了一把刻度尺,对标尺的校对进行检验。这种校正方法虽然不如校准靶准确,但是也利用简单的方法减小了误差。
本实验使用的是克氏针穿刺,针尖到达椎弓根内外缘时分别记录X光片正侧位上的穿刺误差。穿刺点在椎弓根上的最大偏差距离为平均2.4 mm,穿刺的优良率为91.7%。这个结果较优秀导航系统可达1 mm以下的误差还有差距,但是作为一个简易定位仪,结果已经令人满意。在实际的工作中,穿刺时要透视确定位置,这时还可以对定位仪参数进行校正,所以实际应用时可以调整穿刺位置使得穿刺更加准确。
尽管本定位仪在椎弓根穿刺试验取得了成功,但是应该看到仍然存在着一些不足,比如: C型臂成像变形问题造成的误差仍然存在;本实验使用克氏针进行穿刺,遇到坚硬的骨骼可能产生轻微变形,对最后数据的测量造成影响;未植入螺钉,行CT检查等。此定位仪要应用于临床,还需要大样本的研究来进一步验证它的准确性。
新型脊柱定位仪在椎弓根穿刺试验中提高了穿刺的准确性,具有体积小巧、操作方便、精确性高等特点,具有较好的应用前景。
1FOLEY K T, GUPTA S K. Percutaneous pedicle screw fixation of the lumbar spine: preliminary clinical results [J]. J Neurosurg, 2002, 97(1 Suppl): 7-12.
2王作伟, 菅凤增, 王兴文, 等. 经皮椎间孔镜技术治疗腰椎间盘突出症:椎间孔入路和椎板间入路的对照研究 [J]. 中华神经外科杂志, 2016, 32(12): 1214-1219.
3HULME P A, KREBS J, FERGUSON S J, et al. Vertebroplasty and kyphoplasty: a systematic review of 69 clinical studies [J]. Spine (Phila Pa 1976), 2006, 31(17): 1983-2001.
4RICHTER M, MATTES T, CAKIR B, et al. Computer-assisted posterior instrumentation of the cervical and cervico-thoracic spine [J]. Eur Spine J, 2004, 13(1): 50-59.
5陈文杰, 王洪立, 姜建元, 等. 成人腰椎皮质骨钉道的解剖学研究 [J]. 中华骨科杂志, 2015, 35(12): 1213-1221.
6陈赞, 菅凤增. 微创脊柱外科技术与脊柱退变性疾病 [J]. 中国现代神经疾病杂志, 2016, 16(4): 179-181.
7王作伟, 吴浩, 陈赞, 等. 减少腰椎经皮椎弓根螺钉内固定手术中放射暴露的研究 [J]. 中华神经外科疾病研究杂志, 2015, 14(1): 37-40.
8LAINE T, LUND T, YLIKOSKI M, et al. Accuracy of pedicle screw insertion with and without computer assistance: a randomised controlled clinical study in 100 consecutive patients [J]. Eur Spine J, 2000, 9(3): 235-240.
9BARZILAY Y, KAPLAN L, LIBERGALL M. Robotic assisted spine surgery-a breakthrough or a surgical toy ? [J]. Int J Med Robo, 2008, 4(3): 195-196.
10龙浩, 白波卢, 永辉, 等. 自行研制的经皮胸腰椎椎弓根置钉三维定位器应用的可行性实验研究 [J]. 中华创伤骨科杂志, 2011, 13(4): 358-361.
11贺石生, 张海龙, 顾昕, 等. 腰椎微创手术术前定位器的设计及临床应用 [J]. 中华骨科杂志, 2011, 31(10): 1170-1171.
12谭清实, 徐宝山, 夏群, 等. 腰椎定位器在腰椎间盘镜手术中的应用 [J]. 中华骨科杂志, 2010, 30(3): 308-309.
13毛晓芬, 唐龙, 杨波, 等. 经皮脊柱三维定位器的应用研究 [J]. 中华骨科杂志, 2015, 35(10): 1061-1066.
14FAN G, GUAN X, ZHANG H, et al. Significant improvement of puncture accuracy and fluoroscopy reduction in percutaneous transforaminal endoscopic discectomy with novel lumbar location system: preliminary report of prospective hello study [J]. Medicine (Baltimore), 2015, 94(49): e2189.
猜你喜欢
小学生必读(低年级版)(2021年10期)2022-01-18
小学生必读(低年级版)(2021年9期)2021-12-29
今日农业(2021年11期)2021-11-27
小天使·一年级语数英综合(2021年8期)2021-08-17
当代陕西(2019年5期)2019-03-21
价值工程(2018年28期)2018-09-20
电脑爱好者(2017年15期)2017-08-31
消费导刊(2017年21期)2017-01-28
海外星云(2016年17期)2016-12-01
艺术科技(2016年9期)2016-11-18