
北京地铁14号线全自动车辆段设计及应用
2018-01-09 08:00王晓皎
都市快轨交通 2017年6期
徐 亮, 王晓皎
(北京京港地铁有限公司, 北京 100068)
北京地铁14号线全自动车辆段设计及应用
徐 亮, 王晓皎
(北京京港地铁有限公司, 北京 100068)
为解决传统车辆段既有接发车模式中接发车效率低、调度人员工作量大等问题,并降低由此产生的因操作失误而导致事故发生的概率,北京地铁14号线车辆段配置具有列车自动控制系统(ATC)的全自动运行区域,列车在全自动区域升级至基于通信的列车控制系统(CBTC)级别后可实现列车自动防护(ATP)、列车自动操作(ATO)功能以及列车自动监控(ATS)功能,由信号系统防护列车运行安全,并能够以ATO模式自动完成进出段场的运行功能。全自动车辆段作为未来可推广的车辆段建设管理模式,对现行实施的有关全自动车辆段系统功能、系统配置以及运作方式将具有重要的参考意义。
北京地铁; 全自动车辆段; 基于通信的列车控制系统
1 发展概况
北京地铁14号线由于建设原因,采取了分段开通分段运营的模式,其东西段独立运营,停车场和车辆段只能分别使用,尤其是东段运营里程30 km,仅有马泉营车辆段收发车,随着运营间隔逐步缩短,车辆段的发车效率势必需要提升。根据IEEE Std.1474.1.2004《IEEE基于通信的列车控制(CBTC)系统的性能和功能要求》规定,CBTC系统的定义为:利用高精度的列车定位(不依赖于轨道电路),双向连续、大容量的车地数据通信以及车载、地面的安全功能处理器实现的一种连续列车自动控制系统[1]。车辆段在引入全自动设计后,列车可在全自动区域具备CBTC级别下的ATP/ATO功能以及ATS监控功能。在列车升级CBTC后,由信号系统防护列车运行安全,并能够以ATO自动完成进出段场的运行功能,车辆段单线发车能力达到2 min 15 s,双线最小间隔可以达到1 min,而且极大地减轻了司机及车辆段调度人员的劳动强度,提升了段场列车运作的安全性[2]。
2 14号线全自动车辆段系统配置
北京地铁14号线的马泉营车辆段和张仪村停车场内划分有全自动控制区域和非全自动控制区域,其中全自动控制区域纳入ATC系统的控制范围。全自动区域包括停车列检库至转换轨/牵出线,洗车库/月修库前至转换轨,牵出线至停车列检库/月修库/洗车库的所有列车进路[3]。为实现全自动功能,段场配置独立的ZC(区域控制器)设备、CI(计算机联锁)设备、ATS设备及车载ATP/ATO设备,与正线设置的DSU(数据存储单元)设备(包含段场电子地图)共同组成完整的ATC系统。段场的停车列检库及全自动控制区域均设置无线接入点(AP)以实现无线覆盖,从而保证列车以CBTC级别进入全自动区域。列车可根据运营需求选择在全自动控制区域内的运行级别[4]。
2.1 信号设备配置
在车辆段信号楼的信号设备室内配置一套区域控制器ZC,它负责根据CBTC列车所汇报的位置信息以及联锁所排列的进路和轨道占用/空闲信息,为其控制范围内的CBTC列车计算生成移动授权(MA),保证其控制区域内CBTC列车的安全运行。在车辆段调度中心设置一套车站ATS分机及现地控制工作站、ATS派班工作站及附属设备,实现段场的ATS监控功能。在咽喉区及停车列检库内,根据需要分别设置一定数量的无线自由波AP箱、天线和无源应答器。无线自由波AP箱及天线提供车地间信息的传输条件,无源应答器则为列车提供位置校准信息。在停车列检库内靠近列车停车位置处设置两个无源应答器,可使出库列车尽早获取位置信息,升级运行模式[5]。停车列检库配置示意图见图1。
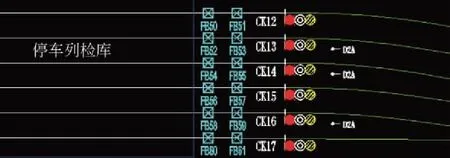
图1 14号线车辆段停车列检库布置方案示意Fig.1 Sketch map of the layout plan for the parking lot of the depot in line 14
2.2 信号机布设
车辆段采用列调分离方案,场内设置列车进路和调车进路,CBTC列车运行采用列车进路控制,非CBTC列车运行采用列车调车进路控制方式。场内信号机设置如下:
1) 进场(段)信号机。进场(段)信号机采用高柱(高度根据车辆高度确定)黄、绿、红三灯位信号机。绿色灯光表明进场(段)的进路开通,准许列车按规定的速度越过该架信号机进场(段);红色灯光表明不准列车越过该架信号机;红色灯光+黄色灯光表示开放引导信号,准许列车以不大于规定的速度(25 km/h)越过该架信号机并随时准备停车。
2) 进库信号机。在进场(段)信号机内第一个轨道区段边界处设置列车兼调车信号机。采用矮型黄、白、红三显示信号机。黄色灯光表明列车进路开通,准许列车按规定的速度越过该架信号机进行作业;白色灯光表明调车进路开通,准许列车按规定的速度越过该架信号机进行调车作业;红色灯光表明不准列车越过该架信号机。
3) 出库信号机。在停车列检库前及洗车库前设置列车兼调车信号机,采用矮型黄、白、红三显示信号机。黄色灯光表明列车进路开通,准许列车按规定的速度越过该架信号机进行作业;白色灯光表明调车进路开通,准许列车按规定的速度越过该架信号机进行调车作业;红色灯光表明不准列车越过该架信号机。
4) 出库分隔信号机。为满足车辆段出库能力,在适当位置设置分隔信号机,采用矮型黄、白、红三显示信号机。灯色显示与出库信号机一致。
5) 调车信号机。场内其他地点根据需要设置矮型调车信号机。白色灯光表明准许列车按规定的速度越过该架信号机进行调车作业;蓝色灯光表明调车进路不准列车越过该架信号机。如果办理了列车进路,无论列车处于何种驾驶模式,均可以越过该架信号机。
对于全自动车辆段,在列车运行过程中的信号机按照如下方式显示:办理进段场/库和出段场/库的列车进路后,该列车进路的始端信号机亮灯,列车进路内的调车信号机保持定位蓝灯显示。CBTC列车司机凭车载信号运行,非CBTC列车司机凭轨旁列车信号机的显示运行;段场内信号机在正常情况下均不灭灯;段场内采用固定闭塞的运行方式,当段场内的列车进路中有列车占用时,联锁控制进路始端信号机为禁止信号,禁止后续列车进入。
2.3 ATS监控方案
ATS子系统将全场纳入控制范围,系统自动完成并实现列车在正线和段场内列车识别号的连续追踪。ATS具备在段场转换轨处停车/不停车情况下自动赋予列车识别号的功能[6],并且ATS子系统能够根据出入库计划自动设置列车头码,自动触发停车列检库至转换轨之间的列车进路、停车列检库双列位移库调车进路以及进出月修库的列车进路,以提高段场出入库运行效率。除此以外的进路可在遥控级别由中心人工办理或调度权交接后由场段调度人员人工办理[7]。
3 运行方式及能力测试
在段场的全自动控制区域内列车可采用CBTC下的ATO/ATP模式、限制人工驾驶模式(RM模式)或非限制人工驾驶模式(EUM模式)运行;在非全自动控制区域内列车采用限制人工驾驶模式(RM模式)或非限制人工驾驶模式(EUM模式)运行。
段场的CBTC列车根据ZC计算的移动授权控制运行。对于进列检库/月修库的列车,移动授权终点在列检库/月修库前平交道口CK信号机处;对于进洗车库的列车,移动授权终点在洗车库前方出库信号机处。CBTC列车可运行至移动授权终点前提示降级,由司机转换驾驶模式为RM后,人工驾驶入库停车。对于出库列车,移动授权终点在出场/段信号机后方保护区段处。
列车在运行过程中,信号系统实时监控进路中轨道、道岔的状态,若前方轨道区段占用或道岔未锁闭在规定位置,则通知列车紧急制动,并需降级为RM模式后由司机驾驶。
3.1 列车出库流程
由ATS自动触发或人工办理出库的列车进路(出库信号机至出场/出段信号机)时,出库信号机亮黄灯,进路内顺向调车信号机保持蓝灯显示。停车列检库双列位移库调车进路和出库列车进路均可由ATS自动触发或人工办理。
出库信号开放后,司机驾驶列车以RM模式向前运行至停车库库门。经过两个应答器后获得位置,列车在库线升级至CBTC级别,驾驶模式转换至ATP或ATO。
CBTC列车按照ZC发送的移动授权计算防护曲线及推荐速度曲线控制列车,运行至转换轨。
3.2 列车进库流程
进库列车从正线进入转换轨以CBTC级别运行。由ATS自动触发或人工办理段(场)进路后,段(场)信号机亮绿灯。ZC为列车延伸移动授权,列车按照移动授权向前运行。停车列检库双列位移库调车进路和进库列车进路均可由ATS自动触发或人工办理。
列车办理进库进路后,进库信号机亮黄灯,进路内顺向调车信号机保持蓝灯。ZC为列车延伸移动授权,列车按照移动授权向前运行。
车载设备按照ZC发送的移动授权计算防护曲线或推荐速度曲线控制列车,由司机驾驶或ATO驾驶向库线运行。
列车以ATO/ATP模式在进库平交道口前提示司机降级为RM模式运行,司机人工将运行模式转为RM模式后,可驾驶列车进入停车库线对位停车。
3.3 出入段能力测试
自动化停车场从理念的引入至正式投入使用,完成了理论设计及现场测试,必不可少的环节是对其收发车能力的测试。从技术角度测试自动化车辆段的出入段能力,综合考虑现场的约束条件,得出具体的技术参数及管理流程,是全自动车辆段可实现推广的关键一步[8]。14号线选取马泉营车辆段为例进行研究,组织各方对车辆段的出入段能力进行验证测试。
以运行间隔作为测试结论,测量从第一辆列车头经过一个给定参考点,到下一辆列车头经过相同的参考点的时间,以此得出马泉营车辆段的出段能力(见图2)。测试设定的运行条件如下:
1) 运行速度。库内至车头越过出列检库信号机的最高运行速度为5 km/h;车头越过出列检库信号机至转换轨的最高运行速度为20 km/h;车头越过转换轨出段信号机后的最高运行速度为75 km/h。
2) 出库路径。最长路径:3AG出库停车点至ZHG1出段停车点;最短路径:25AG出库停车点至ZHG1出段停车点。

图2 14号线马泉营车辆段信号布置Fig.2 Sketch map of signal arrangement in Majiaying depot of line 14
马泉营车辆段现场信号机的设置可实现两种出段方式,第一种是采用CQ信号机单线单车出段,第二种是采用CQ信号机双线双车出段。
3.3.1 采用CQ信号机单线单车出段
采用CQ信号机后分析单线单车出段能力,此方案下存在两段时间间隔,需分别计算取较大值作为出段间隔: 第1列车由分隔信号机CQ至出清转换轨保护区段时间(出清转换轨保护区段间隔); 第2列车出库至出清CQ时间(出库间隔)。车辆段使用列车进路CBTC-ATO模式发车,提高了马泉营车辆段分隔信号机CQ单线发车能力,现场测试中马泉营车辆段的单线出段能力可达到2 min 15 s左右(如表1所示)。

表1 马泉营车辆段单线出车能力测试
3.3.2 采用CQ信号机双线双车出段
后续京港地铁又组织了出入短线双线出段能力测试,同时从ZHG1和ZHG2出车,采用此方式需考虑在进路安排上保证两条出库进路不能敌对,若采用分隔信号机CQ双线出段,实际出段间隔可缩短至1 min左右。
4 结语
基于通信的列车控制(CBTC)系统经过多年的国内应用实践,在技术上已经成熟,它也成为国内地铁建设信号系统的首选解决方案[9]。CBTC系统的引入缩短了列车的运行间隔,提高了系统运营效率,满足了客流量不断增加的需求。但是,目前应用的CBTC系统,车辆段与正线建设并不是同步的[10]。正线采用基于CBTC的列车自动控制(automatic train control,ATC)系统设备,车辆段采用轨道电路及国产计算机联锁设备,通过在出入段线上靠近车辆段处设置转换轨来实现列车出入段时驾驶模式的转换及相关的功能。由于车辆段没有ATC设备,列车的出入段需要人工为其排列相应的调车进路和列车进路,列车在段内的追踪为区间闭塞的方式,追踪间隔大,出入段效率低。列车出入段能力与列车正线运行间隔不匹配成为影响全线运营效率的瓶颈。
京港地铁公司负责运营的地铁14号线在设计之初就引入了全自动车辆段的概念,在系统设计、硬件配置等方面均有考虑,经过多轮技术研讨、开发以及后续功能测试,最终于2015年7月投入使用,满足了分段运营的实际所需,同时系统稳定性非常良好。北京地铁14号线的成功实践说明全自动车辆段可以作为地铁新线建设标准之一。
[1] 地铁设计规范:GB 50157—2013[S].北京:中国建筑工业出版社,2014.
Code for design of metro: GB 50157—2013[S]. Beijing: China Architecture & Building Press, 2014.
[2] 曾小清,王长林,张树京.基于通信的轨道交通运行控制[M].上海:同济大学出版社,2007.
ZENG Xiaoqing, WANG Changlin, ZHANG Shujing. Communication based train operation control for rail transit[M]. Shanghai: Tongji University Press, 2007.
[3] 余港,孙旺.地铁车辆段列车追踪系统设计与应用[J].铁道通信信号, 2014,50(3):41-44.
YU Gang, SUN Wang. Design and application of train position tracing system in depot[J]. Railway signaling & communication, 2014, 50(3): 41-44.
[4] 蔡金山.广州地铁西朗车辆段信号系统改造设计[J].城市轨道交通研究,2013,16(6) :131-133.
CAI Jinshan. Signal transformation design in Xilang depot in Guangzhou metro[J]. Urban mass transit, 2013, 16(6): 131-133.
[5] 王小飞.城市轨道中的CBTC系统[J].铁道知识,2015(2):51-57.
WANG Xiaofei. Communication based train control system in urban rail transit[J]. Railway knowledge, 2015(2): 51-57.
[6] 张芸芸.车辆段正线化条件下的中央ATS系统研究[D].北京:北京交通大学,2013.
ZHANG Yunyun. Research on central ATS system under the depot treated as the mainline[D]. Beijing: Beijing Jiaotong University, 2013.
[7] 丁建中,王喜军.上海北翟路车辆段列车出入段能力研究[J].城市轨道交通研究,2010,13(7):37-39.
DING Jianzhong, WANG Xijun. Research on exit-entry capacity of Beidi Rd. depot of Shanghai metro[J]. 2010,13(7):37-39.
[8] 李琴.ITC模式下地铁列车单/双线出段能力比较分析[J].铁路通信信号工程技术,2014,11(4):67-72.
LI Qin. Analysis of the capacity of moving out from the depot in ITC mode with two operational modes of the single line and double lines[J]. Railway signaling & communication engineering, 2014, 11(4): 67-72.
[9] 金鑫.地铁CBTC系统出入段功能介绍[J].铁道通信信号,2012,48(1):18-20.
JIN Xin. Application of communication-based train control system in depot entry and exit[J]. Railway signaling & communication, 2012, 48(1): 18-20.
[10] 冲蕾,马子彦,杨明来.CBTC系统与车辆段连锁系统接口研究[J].城市轨道交通研究,2013,16(12).
CHONG Lei, MA Ziyan, YANG Minglai. Analysis on the interface between CBTC and depot interlocking system[J]. Urban mass transit, 2013, 16(12).
DesignandApplicationofAutomaticDepotofBeijingMetroLine14
XULiang,WANGXiaojiao
(Beijing MTR Corporation Limited, Beijing 100078)
In order to solve the problems of the low efficiency of the depot exit and entry, the heavy workload of the controller, and the probability of the accident caused by the operation error under the above two conditions, the depot of Beijing Metro Line 14 is configured with automatic operation area with ATC (Automatic Train Control) system. When updated to CBTC (communication-based train control) level in the automatic area, the ATP (automatic train protection), ATO (automatic train operation) and ATS (automatic train supervision) can be achieved. In the automatic operation field the train is protected by signaling system and can complete the function of automatic depot exit and entry with ATO. As an extension of the construction and management mode of the depot, the automatic depot system function, system configuration and operation mode are of great significance for the future.
Beijing metro, automatic depot, Communication-Based Train Control
10.3969/j.issn.1672-6073.2017.06.017
U231
A
1672-6073(2017)06-0095-04
2017-03-03
2017-03-20
徐亮,男,硕士研究生,工程师,从事轨道交通运营与管理方面的研究, bnusunday@163.com
(编辑:王艳菊)
猜你喜欢
铁道通信信号(2020年12期)2020-03-29
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2019年4期)2019-10-10
工程与建设(2019年2期)2019-09-02
铁道通信信号(2018年9期)2018-11-10
铁道通信信号(2018年7期)2018-08-29
减速顶与调速技术(2018年4期)2018-08-27
铁道通信信号(2018年1期)2018-06-06
铁道通信信号(2016年5期)2016-06-01
铁道通信信号(2016年2期)2016-06-01
