基于EDEM的双螺旋奶牛饲喂装置给料性能分析与试验
2018-01-09 01:00戚江涛蒙贺伟李成松李亚萍
农业工程学报 2017年24期
戚江涛,蒙贺伟,坎 杂,李成松,李亚萍
基于EDEM的双螺旋奶牛饲喂装置给料性能分析与试验
戚江涛,蒙贺伟※,坎 杂,李成松,李亚萍
(石河子大学机械电气工程学院,石河子 832000)
奶牛精确饲喂技术的实施不仅能够促进奶牛业健康发展,而且还能够提高牛场经济效益。基于牛场现状,该文在设计的等径双螺旋精确给料的奶牛饲喂装置基础上,理论分析了物料输送速度与给料时间,通过Solidworks对双螺旋给料装置进行了三维建模,并利用EDEM软件分别对40 mm搅龙和70 mm搅龙不同转速(80、100及120 r/min)的给料过程进行了离散元仿真,分析了装置给料稳定性,结果表明,40 mm搅龙在转速为120 r/min时变异系数为0.052 2,70 mm搅龙在转速为100 r/min时变异系数为0.105 2,给料稳定性最优。为进一步验证仿真结果,在搭建的双螺旋给料饲喂装置上,对40 mm搅龙和70 mm搅龙进行了给料试验,试验结果显示,40 mm螺距搅龙转速120 r/min和70 mm搅龙转速100 r/min时给料稳定性最优,试验结果与仿真结果吻合。在验证装置给料稳定性基础上,对给料精度进行了试验,结果显示:40 mm搅龙和70 mm搅龙在80、100、120 r/min等不同工作转速组合下,给料精度均大于95%,当40 mm搅龙转速为120 r/min,70 mm搅龙转速为100 r/min时,给料时间为14.1 s,给料量为6.009 kg,装置给料精度不低于99.835%,符合奶牛精确饲喂效率与精度要求。
控制系统;模型;试验;奶牛;双螺旋;饲喂装置;给料速度;稳定性
0 引 言
在牛场现代化管理中,精细饲养是规模化、现代化牛场提升养殖效益的关键[1]。奶牛精细饲养不仅是畜牧福利养殖的重要体现,而且还是促进奶牛健康生长、提高奶牛生产性能的重要保障,为此,熊本海等[2-6]将电气控制技术、无线通信及信息处理技术等相结合,开展了奶牛个体身份识别、信息采集、处理及饲料精确配比等相关精细饲喂技术研究,为奶牛智能化、科学化饲养提供了一定的技术基础。
在奶牛精细饲养技术实施过程中,给料装置是技术实施关键,其工作性能主要体现在给料稳定性及给料精度2个方面。目前奶牛精细给料采用的螺旋搅龙输料具有结构简单、应用范围广等特点[7-8],对其研究主要集中在螺旋给料器结构和运动参数优化等方面,开展此类研究的有国外如西德学者Hans Gable,以颗粒群为对象研究了垂直输送机小角度倾斜对物料输送形态的影响[9];Fernandez等[10]利用离散元法研究了不同类型螺旋铰刀对总质量流量、物料沉降模式、功耗的影响;Moysey等[11]基于DEM分析单螺旋挤出机的颗粒在螺杆上横向和纵向速度分布;国内乌兰图雅等[12-16]研究了螺距、螺旋轴转速等参数对秸秆、果穗、饲草等物料输送性能的影响;祝佳利等[17-21]利用离散元仿真软件对垂直螺旋搅龙、水平螺旋搅龙等螺旋给料过程进行了模拟仿真,并对螺旋给料结构参数和运动参数等进行了优化。本文在以上研究基础上,对设计的等径双螺旋精确给料奶牛饲喂装置物料输送速度与给料时间进行分析,通过Solidworks对装置进行三维建模,利用EDEM软件对螺旋输送过程进行离散元仿真,分析装置的给料稳定性,最后,通过搭建的双螺旋精确给料装置对仿真结果进行试验验证。
1 双螺旋给料装置结构及工作原理
1.1 结构组成
该装置主要由机架、料仓、驱动电机、输料管、双螺旋给料装置及控制系统等组成,如图1所示。
双螺旋给料装置主要结构参数如表1所示。
1.2 工作原理
装置工作过程中,依据奶牛个体需求确立给料量,并通过控制双螺旋给料装置给料时间完成奶牛个体所需饲喂物料的精确供给,为保证给料效果,给料装置必须同时满足给料速度与给料精度的要求。双螺旋给料装置分别由驱动电机带动,螺旋给料器叶片在旋转运动过程中对物料进行推拨,物料在沿着螺旋叶片圆周方向运动的同时沿轴向方向移动。对目标给料量给料时,首先启动两者同时进行物料供给,当完成80%目标给料量供给时,停止大螺距(70 mm)给料螺旋搅龙,小螺距(40 mm)给料螺旋搅龙继续给料,直至完成目标给料量供给。
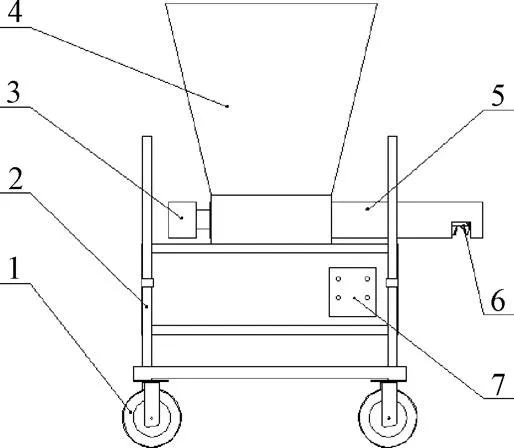
1.轮子 2.机架 3.驱动电机 4.料仓 5.输料管 6.双螺旋给料装置 7.控制系统
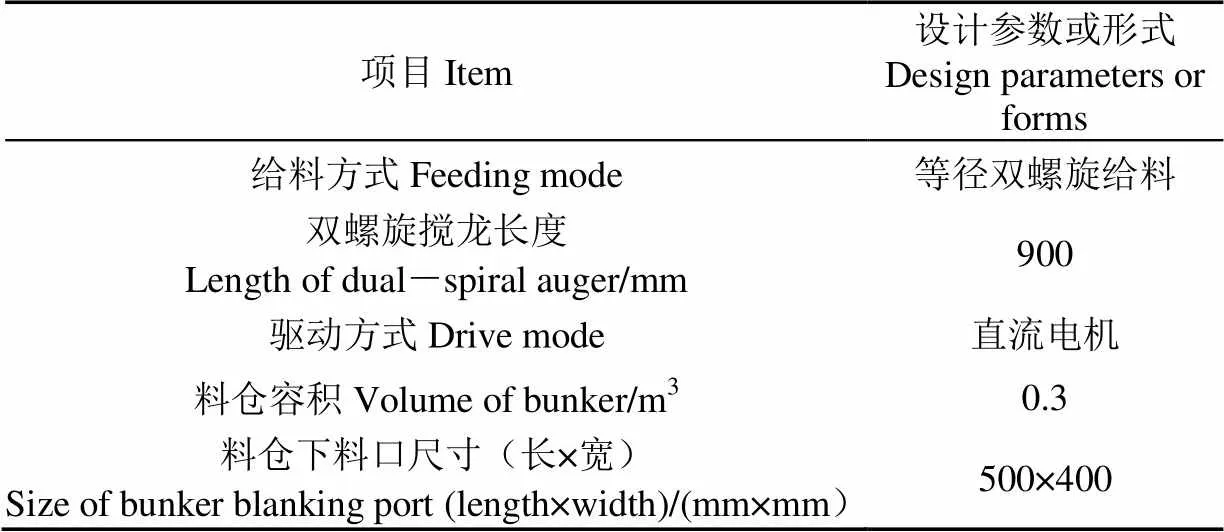
表1 双螺旋给料装置主要结构参数
2 双螺旋给料性能分析
2.1 双螺旋给料装置参数确定
针对奶牛精确饲喂技术要求,为保证装置给料效率的同时满足给料精度要求,本文采用粗给料和精给料相结合的给料方式,其中粗给料采用双螺旋搅龙同时给料方式,给料流量较大,用于提高装置给料效率;精给料采用小螺距螺旋搅龙给料,给料流量小,用于提高给料精度。在前期研究基础上,本文给料装置主要由螺旋叶片、螺旋轴和输料管等组成,螺旋叶片采用实体式形状,按照等螺距(40和70 mm)排列方式焊接在螺旋轴上(图2),螺旋轴材料选择45#钢,轴径40 mm,螺旋轴由步进电机驱动,从而带动螺旋叶片转动,完成物料的推移输送。输料管材料选择无缝钢管,两端分别设有进料口和出料口,为保证螺旋搅龙输送质量,输料管选用直径108 mm、厚2 mm、内壁光滑的无缝钢管,内径与螺旋叶片外径间隙设计为7 mm。
输送物料奶牛精饲料的填充系数、特性系数、综合系数等参数查表可得[24],松散密度=0.7 t/m3,填充系数=0.4,特性系数=0.041 5。牛场调研确定高产奶牛单产饲喂所需最大精饲料量为6 kg[25],每头牛最大给料时间为15 s,可得装置给料速度为0.4 kg/s,即螺旋给料装置的输送能力1.44 t/h。根据螺旋输送装置为水平放置,确定倾角=0,倾角系数=1,螺旋叶片直径按式(1)计算。
式中为输送能力,t/h;为物料特性系数;为填充系数;为倾角系数。
1.驱动电机 2.料仓 3.输料管 4. 40 mm搅龙 5. 70 mm搅龙
1.Drive motor 2.Bunker 3.Conveying pipe 4. 40 mm auger 5. 70 mm auger
图2 双螺旋给料装置示意图
Fig.2 Structure diagram of dual-spiral feeding device
计算可得:≥79.5(mm)
为保证装置给料效率,确保装置输送能力具备较大余量,因此,本研究在计算螺旋叶片直径的基础上,将螺旋叶片的直径加大并确定为90 mm。
2.2 物料输送速度分析
螺旋搅龙工作过程中,物料在螺旋叶片的推拨作用下,沿着螺旋叶片圆周方向向上运动,当到达一定位置时向下塌落,同时沿轴向方向流动[22-23]。在该运动过程中影响物料颗粒的运动轨迹变化的因素除颗粒本身特性之外,还包括受力情况、速度分布情况等,为研究装置给料稳定性,对任一物料颗粒速度分布情况进行了分析,如图3所示。

注:O为颗粒位置;vo为牵连速度,vn为忽略摩擦力情况下的绝对速度,vf为在考虑摩擦力情况下的绝对速度,v为vf分解后轴向速度,vt为vf分解后切向速度,m×s-1;α为vn与v之间夹角,θ为vf与vn之间夹角,(°)。
在任一半径处选取一个颗粒,其运动方式主要有2种,即与螺旋面发生的相对滑动和沿着螺旋轴输送方向的水平运动。其中颗粒的圆周速度(牵连速度)为v=,方向为颗粒运动切线方向;在忽略摩擦力情况下的绝对速度v=vsin;在考虑摩擦力情况下的绝对速度v=v/cos,对v进行分解得到轴向速度和切向速度v。轴向速度使物料颗粒沿着螺旋轴输送方向运动,切向速度则使物料颗粒在螺旋搅龙中搅拌、翻动等。根据速度分析,物料颗粒轴向运动速度为

为分析螺旋输送过程中颗粒速度分布及运动情况,利用EDEM软件对螺旋搅龙中物料运动过程进行仿真,并提取颗粒的运动轨迹如图4所示,图中轨迹线不同颜色代表不同速度值大小,分析轨迹线可知颗粒在落入螺旋给料器工作区域范围内时,颗粒与运动颗粒群之间产生作用力,出现反弹现象,当随颗粒群一起运动时,颗粒沿着螺旋轴切线方向运动的同时沿着轴向方向移动,从而完成物料的运移。
由以上分析可知,当物料颗粒输送方向运动速度>0时,物料颗粒可以沿着输送方向运动;反之则不能。根据个体奶牛饲喂过程需在最短的时间内完成物料投放作业并且保证作业质量要求,螺旋搅龙转速设置为80、100及120 r/min,相应可计算出输送方向速度范围为0.72~1.08 m/s,速度值均大于0,达到了物料颗粒运动条件。
2.3 双螺旋给料时间确定
本文设计的双螺旋精确给料装置主要由大螺距(70 mm)螺旋搅龙和小螺距(40 mm)螺旋搅龙组成。为保证装置给料效率和精度,采用“先快后慢,先粗后精”的给料方式,在初步试验不同螺距搅龙不同转速给料速度的基础上,分析了不同粗精给料比例下的给料时间,按照最大给料量给料时间不高于15 s的要求,初步确定了装置给料实施方案。实施过程中,通过对给料技术方案给料时间和给料精度进行试验,分析其是否符合精细饲喂给料时间不高于15 s、给料精度不低于95%的技术要求,最终确定具体实施方案为:在针对目标给料量给料过程中,首先启动两者同时进行物料供给,当完成80%目标给料量供给时,停止大螺距(70 mm)给料螺旋搅龙,小螺距(40 mm)给料螺旋搅龙继续给料,直至完成目标给料量供给,该过程关系表达式如式(3)。

式中为目标给料量,kg;1为80%目标给料量,kg;2为20%目标给料量,kg;1为大螺距搅龙给料流量,kg/s;2为小螺距搅龙给料流量,kg/s;1为大小螺距搅龙共同运行时间,s;2为小螺距搅龙单独运行时间,s;为总运行时间,s。
为进一步分析装置是否满足给料精度与给料效率的要求,以确定装置最优工作参数,由式(3)可得出双螺旋搅龙完成目标给料量80%的时间1和小螺距搅龙完成目标给料量20%的时间2,从而可计算出给料总时间,即=1+2,根据个体奶牛饲喂要求可得≤15 s。
3 螺旋给料过程仿真与分析
3.1 物理模型建立
螺旋给料装置主要由料仓、输料管、螺旋搅龙等组成,利用Solidworks软件对其进行三维建模,另存为igs格式后导入EDEM软件几何体模块中,仿真重力加速度为9.81 m/s2。在参数设定过程中,在测定物料密度为700 kg/m3基础上,其他参数参考文献[26-29]确定如下:剪切模量2.3×107Pa、泊松比0.3,螺旋搅龙特性参数设置为密度7 850 kg/m3、剪切模量7×1010Pa、泊松比0.3。根据输送物料为颗粒状且颗粒之间和颗粒与几何体之间无粘贴现象,接触模型选用Hertz-Mindlin无滑动接触模型,接触参数设置参考文献[26-29],物料颗粒与物料颗粒之间接触参数设置为恢复系数0.1、动摩擦因数0.7、静摩擦因数0.01,物料颗粒与螺旋搅龙之间接触参数设置为恢复系数0.3、动摩擦因数0.5、静摩擦因数0.01。
3.2 仿真参数设定
在料仓正上方设置颗粒生成平面,属性虚拟,生成物料颗粒半径为2 mm,在前期仿真基础上,为保证仿真过程螺旋搅龙物料输送过程连续稳定,设置颗粒总数为60 000个,生成位置随机,为加快颗粒生成速度,在颗粒下落方向设置颗粒速度为2 m/s。当颗粒全部生成之后,螺旋搅龙开始旋转输送物料,搅龙转速分别设置为80、100及120 r/min,瑞利时间步长设置为25%[30],颗粒生成和排出过程总仿真时间为20 s。
3.3 评价指标
给料稳定性利用给料速度变异系数来进行描述,对各组不同目标给料量和测得的实际下料量进行比较得出变异程度。给料速度变异系数越小说明该水平组合下数据的变异程度就越小,螺旋搅龙的给料稳定性越好。根据公式(6)计算变异系数。

式中为样本的标准差;为样本的均值。
给料精度指标利用相对误差进行描述,通过对比实际给料质量和目标给料质量之间的差异得出相对误差。当确定实际给料质量和目标给料质量2个值后利用公式(7)对相对误差进行计算,相对误差越小,表明装置的给料精度越高,反之给料精度越低。

式中为相对误差,%;为实际给料质量,kg;0为目标给料质量,kg。
3.4 仿真结果分析
颗粒总质量在仿真总时间内先逐渐增加(颗粒生成阶段),当达到某一稳定值时开始逐渐减少(颗粒排出阶段)。在仿真完成后,在仿真分析界面导出颗粒总质量随时间变化表,选取颗粒排出时间段中8个时间点(0.5~4 s,间隔为0.5 s),通过查找每个时间点及其上一时间点的颗粒质量数值计算出每个时间点的排出颗粒质量,相应得出颗粒排出速度,即给料速度。仿真主要对螺旋搅龙在输送物料过程中给料速度的稳定性进行研究。仿真40 mm搅龙、70 mm搅龙的给料情况如表2所示。
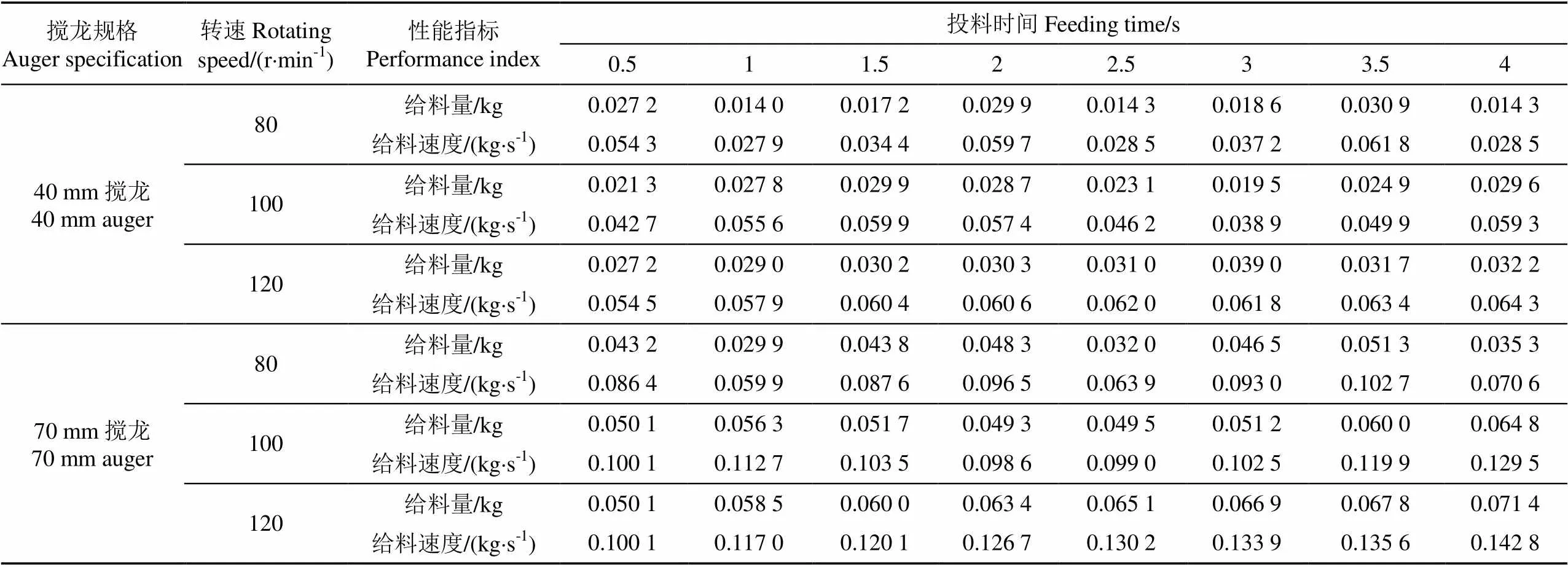
表2 40、70 mm搅龙不同转速、给料时间下的给料量及给料速度
由表2可得不同搅龙转速下40、70 mm搅龙的给料速度均值及变异系数,具体结果如表3所示。
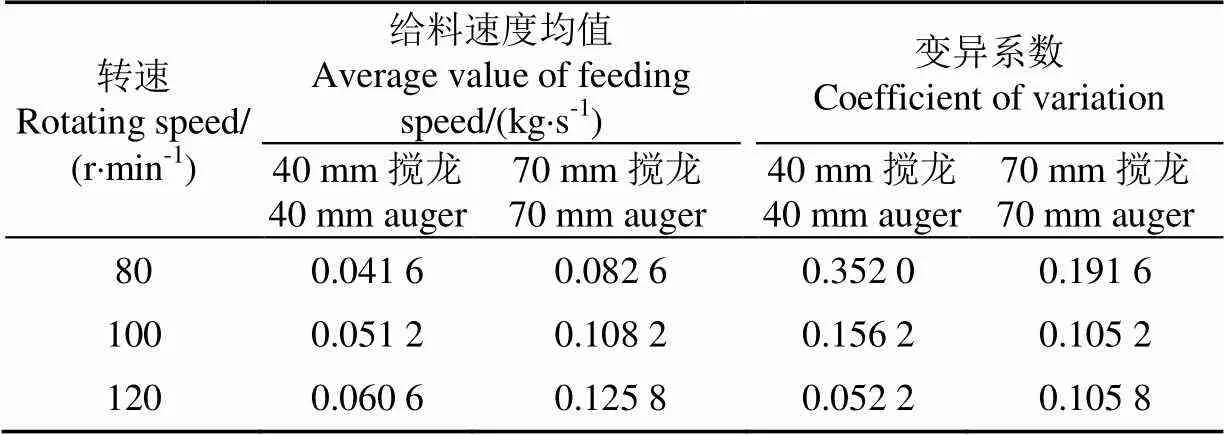
表3 给料速度均值及变异系数表
通过表3可得,螺距为40 mm搅龙在转速为80、100、120 r/min时,给料速度范围为0.041 6~0.060 6 kg/s,螺距为70 mm搅龙在转速为80、100、120 r/min时,给料速度范围为0.082 6~0.125 8 kg/s,其中40 mm搅龙转速为120 r/min时变异系数为0.052 2,70 mm搅龙转速为100 r/min时变异系数为0.105 2,根据数据统计分析变异系数大于15%时数据就不正常,得出该装置给料稳定性较好,符合给料要求。
4 试验验证
4.1 试验仪器与材料
仪器:天平(精度为0.002 kg)、秒表。
试验材料:西部牧业新疆泉牲牧业有限责任公司生产的561-H型泌乳期奶牛精饲料
4.2 给料稳定性试验
试验因素为搅龙螺距、转速,其中螺距水平值为40和70 mm,转速水平值为80、100、120 r/min。通过试验,测得螺距40和70 mm搅龙组合在各转速下5、8和10 s时的给料速度,重复试验10次,测得给料量并计算出给料速度均值及变异系数,如表4所示。
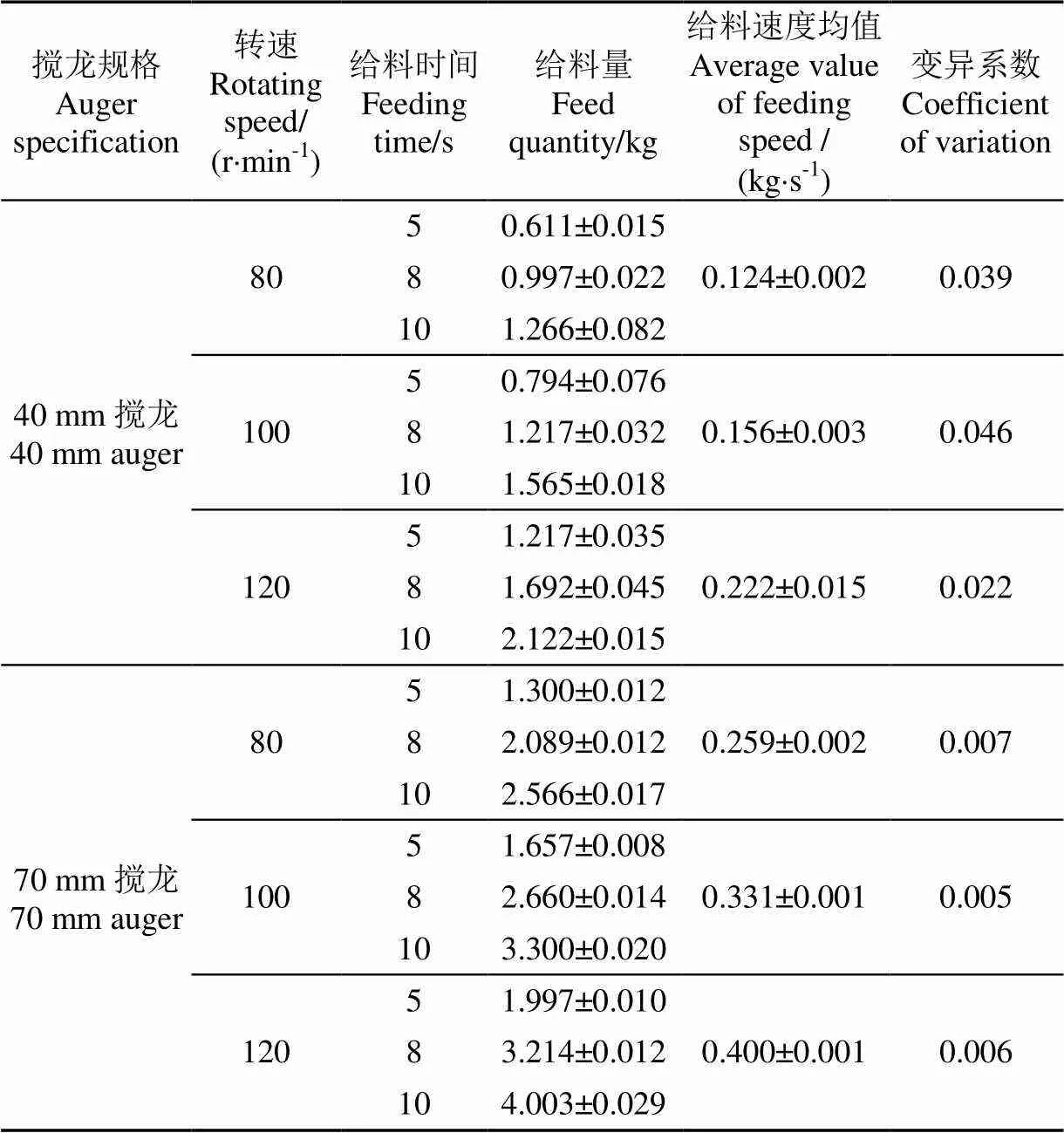
表4 40、70 mm搅龙不同转速、给料时间下的给料量、给料速度均值及变异系数
通过表4可得,40 mm螺距搅龙在转速为80、100、120 r/min时,给料速度范围为0.124~0.222 kg/s,70 mm螺距搅龙在转速为80、100、120 r/min时,给料速度范围为0.259~0.400 kg/s,其中40 mm搅龙在转速为120 r/min时变异系数为0.022,70 mm搅龙在转速为100 r/min时变异系数为0.005,给料稳定性均较好,仿真结果与试验结果相吻合。
4.3 给料精度试验
试验过程中,将精饲料给料量设置为6 kg,按照“先快后慢,先粗后精”给料方式,根据式(4)、式(5)计算各搅龙给料时间,并进一步控制各搅龙的运转,设定各搅龙转速并进行给料,测量实际下料量,由式(7)计算相对误差,实际给料量及给料相对误差如表5所示。

表5 40、70mm搅龙不同工作参数及其对应相对误差
由表5可得,40 mm搅龙和70 mm搅龙在80、100、120 r/min等不同工作转速组合下,给料精度均大于95%,根据奶牛精细养殖给料时间要求,确定40 mm搅龙转速120 r/min、70 mm搅龙转速100 r/min,装置给料总时间14.1s,给料量6.009 kg,给料相对误差0.165%,即装置给料精度不低于99.835%,符合奶牛精确饲喂效率与精度要求。
5 结 论
根据个体奶牛精确养殖要求,在设计的等径双螺旋精确给料的奶牛饲喂装置基础上,理论分析了物料输送速度与给料时间,并分别采用仿真试验及验证试验的方法对等径双螺旋精确给料装置进行了研究,并得到了以下结论:
1)通过Solidworks三维建模以及EDEM给料过程离散元仿真,确立了40、70 mm螺距搅龙最优转速组合为120、100 r/min,并在搭建的双螺旋给料饲喂装置上,对40 mm搅龙和70 mm搅龙进行了给料稳定性试验,结果显示:40 mm螺距搅龙转速120 r/min和70 mm搅龙转速100 r/min时变异系数分别为0.022和0.005,给料稳定性最优,试验结果与仿真结果吻合。
2)在对给料稳定性研究的基础上,通过搭建的双螺旋给料饲喂装置对装置进行了给料精度试验,结果显示:40、70 mm搅龙转速组合为120、100 r/min时,给料时间为14.1 s,给料量6.009 kg,给料精度不低于99.835%,符合奶牛精确饲喂效率与精度要求。
[1] 于啸. 奶牛精量饲喂控制系统的研究[D]. 长春:吉林大学,2016.
Yu Xiao. Research on Precision Feeding Control System of Dairy Cattle[D]. Changchun: Jilin University, 2016. (in Chinese with English abstract)
[2] 熊本海,蒋林树,杨亮,等. 奶牛饲喂自动机电控制系统的设计与试验[J]. 农业工程学报,2017,33(7):157-163.
Xiong Benhai, Jiang Linshu, Yang Liang, et al. Design and experiment of automatic electromechanical control system for dairy feeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(7): 157-163. (in Chinese with English abstract)
[3] 高振江,郭跃虎,蒙贺伟,等. 自走式奶牛精确饲喂机控制系统[J]. 农业机械学报,2012,43(11):226-230,236.
Gao Zhenjiang, Guo Yuehu, Meng Hewei, et al. Automatic control system of automatic feeding machine for dairy cows[J]. Transactions of The Chinese Society of Agricultural Machinery, 2012, 43(11): 226-230, 236. (in Chinese with English abstract)
[4] 范永存,张长利,董守田,等. 奶牛精量饲喂系统研究[J]. 农业机械学报,2009(S1):65-68,64.
Fan Yongcun, Zhang Changli, Dong Shoutian, et al. Study on precision feeding system for dairy cows[J]. Transactions of The Chinese Society of Agricultural Machinery, 2009(S1): 65-68, 64. (in Chinese with English abstract)
[5] 花俊国,周永亮,花俊治,等. 奶牛自动饲喂系统的研究与开发[J]. 农业工程学报,2006,22(增刊2):79-83.
Hua Junguo, Zhou Yongliang, Hua Junzhi, et al. Research and development of automatic feeding system for dairy cattle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(Supp.2): 79-83. (in Chinese with English abstract)
[6] 杨存志,李源源,杨旭,等. FR-200型奶牛智能化精确饲喂机器人的研制[J]. 农机化研究,2014,36(2):120-122,126.
Yang Cunzhi, Li Yuanyuan, Yang Xu, et al. Development of intelligent feeding robot for FR-200 cows[J]. Journal of Agricultural Mechanization Research, 2014, 36(2): 120-122, 126. (in Chinese with English abstract)
[7] 贾朝斌,程珩. 螺旋输送机参数化设计方法研究[J]. 机械设计与制造,2015(4):206-208,213.
Jia Chaobin, Cheng Hang. Research on parametric study method of screw conveyor[J]. Machinery Design &Manufacture, 2015(4): 206-208, 213. (in Chinese with English abstract)
[8] 高振江,李辉,蒙贺伟. 基于全混合日粮饲喂技术的精饲料精确饲喂模式[J]. 农业工程学报,2013,29(7):148-154.
Gao Zhenjiang, Li Hui, Meng Hewei. Study on concentrated precise feeding pattern based on feeding technology of TMR[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(7): 148-154. (in Chinese with English abstract)
[9] 许岚. 变径变螺距螺旋输送机的理论与实验研究及仿真[D]. 湘潭:湘潭大学,2006.
Xu Lan. Theoretical and Experimental Research and Simulation of Variable Screw Pitch Screw Conveyor[D]. Xiangtan: Xiangtan University, 2006. (in Chinese with English abstract)
[10] Fernandez J W, Cleary P W, McBride W. Effect of screw design on hopper drawdown of spherical particles in a horizontal screw feeder[J]. Chemical Engineering Science, 2011, 66(22): 5585-5601.
[11] Moysey P A, Thompson M R. Modelling the solids inflow and solids conveying of single-screw extruders using the discrete element method[J]. Powder Technology, 2005, 153(2): 95-107.
[12] 乌兰图雅,王春光,祁少华,等. 揉碎玉米秸秆螺旋输送性能试验分析[J]. 农业工程学报,2015,31(21):51-59.
Wulantuya, Wang Chunguang, Qi Shaohua, et al. Performance experiment of screw conveyor for chopped corn stalks[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 51-59. (in Chinese with English abstract)
[13] 由佳翰,陈学庚,张本华,等. 4JSM-2000型棉秆粉碎与残膜回收联合作业机的设计与试验[J]. 农业工程学报,2017,33(10):10-16.
You Jiahan, Chen Xuegeng, Zhang Benhua, et al. Design and experiment of 4JSM-2000 type combined operation machine for cotton stalk chopping and residual plastic film collecting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 10-16. (in Chinese with English abstract)
[14] 刘师多,牛康,师清翔,等. 玉米果穗螺旋摩擦输送装置的输送性能试验[J]. 农业工程学报,2013,29(12):9-16.
Liu Shiduo, Niu Kang, Shi Qingxiang, et al. Test of conveying performance of corn ear spiral friction conveyor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(12): 9-16. (in Chinese with English abstract)
[15] 王升升,耿令新,师清翔,等. 螺旋输送与筛筒组合式分离装置性能试验[J]. 农机化研究,2017,39(8):180-185.
Wang Shengsheng, Geng Lingxin, Shi Qingxiang, et al. Performance test of spiral conveying and sieve tube combined separation of agricultural mechanization equipment[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 180-185. (in Chinese with English abstract)
[16] 谢凡. 肉羊饲喂混合搅拌机混料系统结构设计与研究[D].石河子:石河子大学,2014.
Xie Fan. Structure Design and Research of Mixing System for Sheep Fed Hybrid Mixer[D]. Shihezi: Shihezi University, 2014. (in Chinese with English abstract)
[17] 祝佳利. 垂直振动物料输送的DEM仿真研究[D]. 沈阳:东北大学,2010.
Zhu Jiali. DEM Simulation Study on Vertical Vibration Material Transportation[D]. Shenyang: Northeastern University, 2010. (in Chinese with English abstract)
[18] 宋欢. 定量螺旋输送机的优化设计及模拟[D]. 青岛:青岛科技大学,2016.
Song Huan. Optimum Design and Simulation of Quantitative Screw Conveyor [D]. Qingdao: Qingdao University of Science & Technology, 2016. (in Chinese with English abstract)
[19] 顾晓宇. 柔性叶片螺旋输送机理及仿真研究[D]. 哈尔滨:哈尔滨商业大学,2014.
Gu Xiaoyu. Mechanism and Simulation of Helical Conveying of Flexible Blade[D]. Harbin: Harbin University of Commerce, 2014. (in Chinese with English abstract)
[20] 李海燕. 基于EDEM的垂直螺旋输送机性能参数仿真研究[D]. 太原:太原科技大学,2011.
Li Haiyan. EDEM Simulation Study on Performance Parameters of Vertical Helical Conveyor[D]. Taiyuan: Taiyuan University of Science and Technology, 2011. (in Chinese with English abstract)
[21] 杨洋. 基于EDEM的输粮搅龙输送性能仿真研究与优化[D]. 成都:西华大学,2016.
Yang Yang. EDEM Simulation and Optimization of Grain Feeding and Auger Transportation Performance[D]. Chengdu: Xihua University, 2016. (in Chinese with English abstract)
[22] 李景彬,郭庆贺,温宝琴,等. 自走式肉羊饲喂机的设计与试验[J]. 农机化研究,2016,38(3):218-221.
Li Jingbin, Guo Qinghe, Wen Baoqin, et al.Design and test of the self- propelled machine of sheep feeding[J]. Journal of Agricultural Mechanization Research, 2016, 38(3): 218-221. (in Chinese with English abstract)
[23] 张华,李秀金,蔡璐平,等. 槽式堆肥中搅拌螺旋输送能力的研究[J]. 农机化研究,2008(4):127-130.
Zhang Hua, Li Xiujin, Cai Luping, et al. Study on material conveyer ability of stirring screws used in trough aerobic composting system[J]. Journal of Agricultural Mechanization Research, 2008(4): 127-130. (in Chinese with English abstract)
[24] 运输机械设计选用手册编辑委员会编. 运输机械设计选用手册(下册)[M]. 北京:化学工业出版社,2000.
[25] 蒙贺伟,高振江,坎杂,等. 等径变螺距奶牛精确饲喂给料装置设计与试验[J]. 农业工程学报,2011,27(3):103-107.
Meng Hewei, Gao Zhenjiang, Kan Za, et al. Design and experiment on dairy cow precision-feeding device based on equal-diameter and variable-pitch[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 103-107. (in Chinese with English abstract)
[26] 蒙贺伟,高振江,林海,等. 基于粗精给料奶牛精确饲喂装备给料系统的研究[J]. 石河子大学学报:自然科学版,2011,29(3):361-366.
Meng Hewei, Gao Zhenjiang, Lin Hai, et al. Study on feeding system of precision feeding equipment based on coarse and fine feeding cows[J]. Journal of Shihezi University: Natural Science, 2011, 29(3): 361-366. (in Chinese with English abstract)
[27] 张氢,夏华,孙远韬,等. 垂直螺旋输送机临界转速的仿真研究[J]. 中国粉体技术,2017,23(5):1-6.
Zhang Qing, Xia Hua, Sun Yuantao, et al.Simulation research of critical speed for vertical screw conveyor[J]. China Powder Science and Technology, 2017, 23(5): 1-6. (in Chinese with English abstract)
[28] 顿国强,陈海涛,冯夷宁,等. 基于EDEM软件的肥料调配装置关键部件参数优化与试验[J]. 农业工程学报,2016,32(7):36-42.
Dun Guoqiang, Chen Haitao, Feng Yining, et al. Parameter optimization and test of key parts of fertilizer allocation device based on EDEM software[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(7): 36-42. (in Chinese with English abstract)
[29] 杨星,于克强,王德福. 基于EDEM的转轮式TMR混合机混合性能数值模拟[J]. 农机化研究,2017,39(3):218-223.
Yang Xing, Yu Keqiang, Wang Defu. Numerical simulation on mixing performance of paddle-wheel total mixed ration mixer based on EDEM[J]. Journal of Agricultural Mechanization Research, 2017, 39(3): 218-223. (in Chinese with English abstract)
[30] 孟杰,孟文俊. 影响EDEM仿真结果的因素分析[J]. 机械工程与自动化,2014(6):49-51.
Meng Jie, Meng Wenjun. Analysis of influencing factor on results of EDEM simulation[J]. Mechanical Engineering & Automation, 2014(6): 49-51. (in Chinese with English abstract)
Analysis and test of feeding performance of dual-spiral cow feeding device based on EDEM
Qi Jiangtao, Meng Hewei※, Kan Za, Li Chengsong, Li Yaping
(,832000,)
Dairy industry is an economic and efficient livestock husbandry, and it is also an important component of modern agriculture. The healthy development of dairy industry is of great significance for improving the structure of agriculture, for improving the living standards of the people and for promoting the development level of animal husbandry and breeding industry. In recent years, with the rapid development of all sectors of society, people’s living standards are improved; the demand for dairy products and quality requirements are increasing. However, the traditional way of artificial feeding has been unable to meet the needs of rapid development of large scale dairy farms, and scientization, intelligence and automation for cow feeding process have become an inevitable trend. Therefore, for the feeding status of concentrate for dairy cattle, a feeding device based on equal diameter and dual-spiral precision feeding is designed in this paper, which can achieve the accurate supply of concentrate according to the demand of individual cow feeding.The device is mainly composed of a storage bunker, a dual-spiral feeding device and a control system, and the 2 kinds of screw pitches of the dual-spiral feeding device are 40 and 70 mm, respectively. The screw auger device of 70 mm pitch is used to improve the feeding efficiency of the device. And the screw auger device of 40 mm pitch is used to improve the feeding accuracy. By combining the screw auger devices of big pitch and small pitch, the feeding of pellet feed can be quickly and accurately completed within a specified time. The specific work process is as follows: When feeding the target quantity, start both of the material supply ways at the same time; when 80% is completed, stop the screw auger device of big pitch (70 mm pitch), and the screw auger device of small pitch (40 mm pitch) continues to feed until achieving target feed delivery. In the process of design and research, the main structure parameters of the pellet feed feeding device are designed. The dual-spiral feeding device is modeled by using Solidworks software, and EDEM (enhanced discrete element method) software is used to simulate the feeding process of the screw auger devices of 40 and 70 mm at different rotating speeds (80, 100 and 120 r/min) respectively. The results showed that the variation coefficient of the screw auger device of 40 mm pitch was 0.052 2 when the rotation speed was 120 r/min, the variation coefficient of the screw auger device of 70 mm pitch was 0.105 2 when the rotation speed was 100 r/min. In order to further verify the simulation results, a cow feeding device based on equal diameter and dual-spiral precision feeding was set up. Feeding speed stability index was described by variation coefficient, relative error was used to evaluate feeding precision index, and feeding performance test of the screw auger devices of 40 and 70 mm pitch was carried out. The feeding speed was measured at 5, 8 and 10 s in different rotation speeds, and the repetition experiment was carried out 10 times. The results showed when the rotation speed of the screw auger device of 40 mm pitch was 120 r/min and that of the screw auger device of 70 mm pitch was 100 r/min, the feeding stability was the best. The experimental results are consistent with the simulation results. On the basis of the feeding stability of the verification device, the feeding accuracy was tested. The screw auger devices of 40 and 70 mm pitch cooperate in different working speeds, feeding accuracy is not less than 95%; when the rotation speed of the screw auger device of 40 and 70 mm pitch is 120 and 100 r/min, respectively, the feeding time is 14.1 s, the actual feeding quantity is 6.009 kg, and the device feeding accuracy is not less than 99.835%. The results conform to the requirements of the cow precise feeding for efficiency and precision.
control systems; models; tests; cow; dual-spiral; feeding device; feeding speed; stability
10.11975/j.issn.1002-6819.2017.24.009
S817.12
A
1002-6819(2017)-24-0065-07
2017-08-15
2017-11-03
兵团应用基础研究计划项目(2016AG011);兵团工业及高新技术科技攻关与成果转化计划项目(2015AB001);石河子大学科技项目(ZZZC201740B)
戚江涛,男,内蒙古赤峰人,实验师,研究方向为农业机械化工程。Email:qjt510014078@163.com
蒙贺伟,男,新疆伊犁新源县人,副教授,研究方向为农业机械化工程。Email:mhw_mac@shzu.edu.cn
戚江涛,蒙贺伟,坎 杂,李成松,李亚萍. 基于EDEM的双螺旋奶牛饲喂装置给料性能分析与试验[J]. 农业工程学报,2017,33(24):65-71. doi:10.11975/j.issn.1002-6819.2017.24.009 http://www.tcsae.org
Qi Jiangtao, Meng Hewei, Kan Za, Li Chengsong, Li Yaping. Analysis and test of feeding performance of dual-spiral cow feeding device based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 65-71. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.24.009 http://www.tcsae.org
猜你喜欢
现代装饰(2022年1期)2022-04-19
内江科技(2022年3期)2022-03-30
中华养生保健(2020年5期)2020-11-16
智慧少年·故事叮当(2020年2期)2020-03-08
智慧少年·故事叮当(2019年11期)2019-12-09
红领巾·探索(2018年10期)2018-11-14
智慧少年·故事叮当(2018年11期)2018-05-14
中国卫生标准管理(2015年4期)2016-01-14
中国医学影像学杂志(2015年9期)2015-12-15
数学大王·低年级(2015年6期)2015-07-09