
基于递归小波神经网络的UAV姿态变结构优化控制*
2018-01-08 06:28陈贵平
沈阳工业大学学报 2018年1期
陈贵平
(贵州师范大学 大数据与计算机科学学院,贵阳 550001)
基于递归小波神经网络的UAV姿态变结构优化控制*
陈贵平
(贵州师范大学 大数据与计算机科学学院,贵阳 550001)
无人机的姿态控制易受外界气流干扰和模型参数摄动影响,为了提高其姿态控制的精度和稳定度,提出了将变结构控制与递归小波神经网络相结合的优化鲁棒控制律.构建并分析了无人机的姿态运动模型,采用变结构控制来设计无人机姿态运动的稳定控制律,将递归小波神经网络加入到控制闭环回路中以实现变结构控制律的优化,减弱控制律对模型准确度的依赖性,并在仿真验证中与传统方法进行了比较.结果表明,该控制律能够提高其姿态控制的稳定性,且具有较强鲁棒性、较短收敛时间和较小能量消耗,从而证明了本文方法的有效性和可行性.
无人机;姿态控制;变结构控制;递归小波神经网络;优化控制;稳定性;鲁棒性;能量消耗
无人机的飞控系统是无人机系统的重要组成部分和关键核心技术,也是当前无人机控制应用领域的研究热点.无人机要实现稳定的自主飞行,必须要实现对内外回路(姿态和位置)的有效控制,而内回路的稳定控制又是外回路控制的前提条件,即实现俯仰、偏航和滚动三个方向上的姿态控制.
目前,无人机的姿态控制是国内外学者的研究热点[1-4].文献[5]基于四元数来研究四轴无人机的姿态估计和控制,设计了梯度下降算法和比例微分控制器;文献[6]将回溯法、滑模控制和神经网络结合起来用于无人机的姿态控制,具有较好的鲁棒性;文献[7]设计了自结构动态递归模糊神经网络来控制无人机的姿态运动,该方法比固定结构的模糊神经网络具有更快的响应速度;文献[8]针对难以建立无人机的精确数学模型这个问题,提出双闭环复合控制策略分别对外环姿态和内环姿态角速度进行控制,并且在专业飞行软件X-plane和仿真工具Matlab下进行了数学仿真;文献[9]将无人机的姿态模型划分为快慢两个回路,分别利用最优广义预测控制算法来设计控制律.
虽然上述方法具有较好的控制效果,但是没有在实现姿态稳定控制的同时考虑控制性能的优化.为此,本文将变结构控制与递归小波神经网络两种方法相结合应用于无人机的姿态控制.根据变结构控制理论设计了稳定且鲁棒的姿态控制律,将递归小波神经网络嵌入到姿态控制回路中,利用其能够逼近数学模型的优点,减弱了控制律对模型参数的依赖性,得到更加优化的控制效果.通过仿真实验分析得到了无人机姿态角的变化曲线,并与传统方法进行了比较,对比了优化前后的性能指标,证明了本文方法的有效性和可行性.
1 无人机姿态运动模型与分析
1.1 姿态运动模型
为了能够准确描述无人机的姿态运动特征,以某型号无人机为分析研究对象,不考虑无人机的弹性和振动因素,建立其在飞行过程中的三通道姿态运动模型[10-11],即
(1)
假定无人机在纵向运动上具有对称性,可根据式(1)研究无人机俯仰角的跟踪控制,将式(1)中的第一式改写为

(2)


(3)
1.2 姿态运动分析
针对式(3)所示的无人机姿态运动模型,为了便于控制器设计,需要对其物理特性进行定常运动分析,给出两个合理的假设.
(4)

(5)

(6)
(7)
2 无人机姿态运动优化控制设计
2.1 变结构控制器设计
无人机姿态运动模型具有多变量、非线性的特性,因此,采用变结构控制器的设计方法可以使系统具有较强的鲁棒性和更高的控制精度.

(8)
定义变结构控制中的滑模面为
s=ce1+e2
(9)
式中,c为固定常数.由式(8)可得滑模面的导数为

(10)


(11)
式中,sgn(s)=s/(|s|+λ),λ>0是一个较小的常数.因此,可以得到无人机姿态稳定的总控制律,即
u=u0+ueq=
(12)
2.2 基于递归小波神经网络的控制律优化
由于无人机的姿态运动具有较强的非线性,且受参数变动和外部扰动影响,很容易引起控制系统的不稳定.为了减弱控制律对系统模型的依赖性,提高控制律的自适应性和鲁棒性,使用递归小波神经网络方法[12]来优化控制律.
2.2.1 递归小波神经网络
递归小波神经网络是递归神经网络和小波神经网络二者的结合,融合两种神经网络的优点,即结构简单且动态性好,不仅能够提高系统的稳定性,还可以动态地辨识非线性系统.
本文采用具有四层神经元的递归小波神经网络,其分别为输入层、小波层、产生层和输出层.每一层的特征如下:
(13)

(14)
第二层为小波层,小波层的每个节点包括母波和反馈回路,母波的表达式为
δ(x)=-xe-x2/2
(15)
该层的输入和输出分别为

(16)
(17)
第三层为产生层,产生层的每个节点由乘积函数得到,其输入和输出分别为
(18)

(19)
式中,nN为产生层的节点个数.
第四层为输出层,输出层的每个节点都是输入信号之和,其输入和输出分别为
(20)
(21)
取m、σ和r分别为隐含层的参数,W为输出权重矩阵,则整个递归小波神经网络的输出为
y(a,σ,m,r,W)=WTf(a,σ,m,r)
(22)
2.2.2 控制律优化

无人机姿态优化控制的系统框图如图1所示.将变结构控制的结果作为无人机姿态控制的期望值,并根据无人机的初始状态及其姿态运动模型得到实际值,利用期望值与实际值的偏差来对无人机进行优化控制.
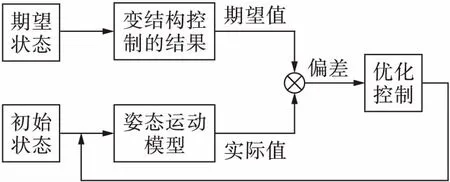
图1 无人机姿态优化控制系统Fig.1 Optimized attitude control system for UAV
由梯度下降算法[13-14]来调整输出层的权值,在外部扰动下,无人机俯仰角度的输出、控制量的输出和神经元的输出分别为

(23)
uj(k+1)=g(netj-θj,u(k))
(24)

(25)

(26)
最终可根据图1所示的方法实现无人机姿态的变结构优化控制.
3 仿真实验与分析
为了体现本文方法的优势,在进行仿真实验与分析时,与传统的PID控制方法进行了比较.定义无人机姿态控制的能量消耗为
(27)
式中,t1和t2分别为控制的起始和结束时刻.仿真的初始条件如下:无人机的俯仰角、偏航角和滚动角的初始值分别为6°、8°和-10°,相对应的期望值分别为0°、0°和0°.仿真步长为0.05 s,对递归小波神经网络的每一维进行五等分,其初始值的取值分别位于如下区间:[-10-3,10-3]、[-10-2,10-2]、[-2×10-3,2×10-3]、[-10-4,10-4]、[-10-3,10-3]、[-5×10-3,5×10-3].
根据上述仿真参数,分别采用本文方法和传统PID方法进行实验,得到的无人机俯仰角、偏航角和滚动角的仿真结果分别如图2~4所示.可以看出,在本文方法的作用下,无人机的姿态角在较短时间内均能够调节到期望值,且在控制过程中的时间变化曲线比较平滑,超调量较小,三个方向姿态角控制的收敛时间分别约为2.1、2.8和3.5 s.而传统的PID控制在收敛时间上均比本文方法要长,分别为3.6、5.0和5.5 s.表1为本文方法和传统PID方法在姿态控制过程中的能量消耗.从表1中可以看出,本文控制方法在能量消耗上要低于传统的PID控制方法,优化率为32.84%.仿真实验结果表明,本文控制方法在收敛时间和能量消耗上具有较明显的优势,证明了本文方法的有效性和可行性.
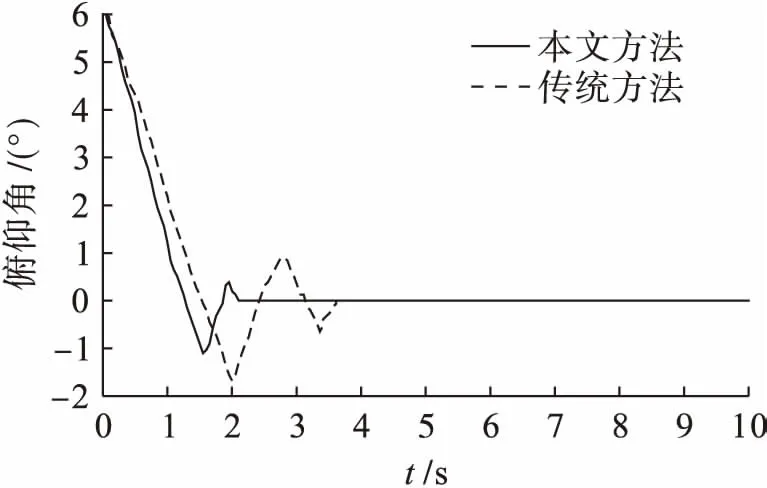
图2 俯仰角控制结果的比较Fig.2 Comparison in control result of pitch angle

图3 偏航角控制结果的比较Fig.3 Comparison in control result of yaw angle
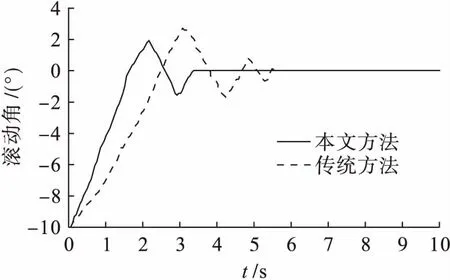
图4 滚动角控制结果的比较Fig.4 Comparison in control result of roll angle

表1 能量消耗比较Tab.1 Comparison in energy consumption
4 结 论
本文将变结构控制与递归小波神经网络相结合设计无人机的姿态控制律,不仅能够解决模型不确定性和外界干扰的问题,减少控制律对模型的依赖程度,还可以使控制过程中的能量消耗更少,收敛时间更短.由仿真实验得到的三个方向姿态角的时间变化曲线验证了本文方法的有效性和可行性.本文方法不仅可以有效地提高无人机姿态控制的收敛速度和稳定度,而且能够减少控制过程中的能量消耗,控制优化率能达到32.84%.
[1] 朱华勇,牛轶峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势 [J].国防科技大学学报,2010,32(3):115-120.
(ZHU Hua-yong,NIU Yi-feng,SHEN Lin-cheng,et al.State of the art and trends of autonomous control of UAV systems [J].Journal of National University of Defense Technology,2010,32(3):115-120.)
[2] 宗群,王丹丹,邵士凯,等.多无人机协同编队飞行控制研究现状及发展 [J].哈尔滨工业大学学报,2017,49(3):1-14.
(ZONG Qun,WANG Dan-dan,SHAO Shi-kai,et al.Research status and development of multi UAV coordinated formation flight control [J].Journal of Harbin Institute of Technology,2017,49(3):1-14.)
[3] Chang H,Duan H.Arificial bee colony optimized controller for unmanned rotorcraft pendulum [J].Aircraft Engineering and Aerospace Technology,2013,85(2):104-114.
[4] Cai G,Chen B M,Dong X,et al.Design and implementation of a robust and nonlinear flight control system for an unmanned helicopter [J].Mechatronics,2011,21(5):803-820.
[5] 冀亮,钱正洪,白茹.基于四元数的四轴无人机姿态的估计和控制 [J].现代电子技术,2015,38(11):112-116.
(JI Liang,QIAN Zheng-hong,BAI Ru.Attitude estimation and control of quaternion based quad-axis UAV [J].Modern Electronics Technique,2015,38(11):112-116.)
[6] 李明锁.基于神经网络的无人机滑模飞行控制设计 [J].测控技术,2012,32(1):96-100.
(LI Ming-suo.Sliding mode flight control for unmanned aerial vehicle based on neural networks [J].Measurement and Control Technology,2012,32(1):96-100.)
[7] 陈向坚,白越,续志军,等.基于自结构动态递归模糊神经网络的无人机姿态控制 [J].计算机应用研究,2011,28(9):3387-3389.
(CHEN Xiang-jian,BAI Yue,XU Zhi-jun,et al.Motion control for unmanned aircraft vehicle based on self-structuring recurrent fuzzy neural network [J].Application Research of Computers,2011,28(9):3387-3389.)
[8] 张兴文,陈铭,曹飞,等.无人机姿态控制系统设计及仿真 [J].计算机仿真,2016,33(7):158-161.
(ZHANG Xing-wen,CHEN Ming,CAO Fei,et al.Design and simulation of UAV attitude control system [J].Computer Simulation,2016,33(7):158-161.)
[9] 张立珍,王庆宇,王迷迷,等.基于OGPC的无人机姿态控制律设计 [J].电光与控制,2017,24(4):19-22.
(ZHANG Li-zhen,WANG Qing-yu,WANG Mi-mi,et al.Design of UAV attitude control law based on the OGPC [J].Electronics Optics & Control,2017,24(4):19-22.)
[10]陈增强,李毅,孙明玮,等.四旋翼无人机飞行器ADRC-GPC控制 [J].哈尔滨工业大学学报,2016,48(9):176-180.
(CHEN Zeng-qiang,LI Yi,SUN Ming-wei,et al.ADRC-GPC control of a quad-rotor unmanned aerial vehicle [J].Journal of Harbin Institute of Technology,2016,48(9):176-180.)
[11]王伟,胡镇,马浩,等.多旋翼倾转定翼无人机的姿态控制 [J].计算机仿真,2014,31(1):31-35.
(WANG Wei,HU Zhen,MA Hao,et al.Attitude control for multi tile-wing UAV [J].Computer Simulation,2014,31(1):31-35.)
[12]刘斌,王洁,何广军,等.基于递归小波神经网络的无人机反演控制 [J].计算机仿真,2016,33(2):116-121.
(LIU Bin,WANG Jie,HE Guang-jun,et al.Inversion control for unmanned aerial vehicle based on recurrent wavelet neural networks [J].Computer Simulation,2016,33(2):116-121.)
[13]丁惜瀛,王春强,李琳.基于对角递归神经网络的汽车主动悬架控制 [J].沈阳工业大学学报,2015,37(1):6-10.
(DING Xi-ying,WANG Chun-qiang,LI Lin.Vehicle active suspension control based on diagonal recurrent neural network [J].Journal of Shenyang University of Technology,2015,37(1):6-10.)
[14]马瑞,吴洪涛,丁力.基于人工蜂群算法的无人直升机LQG/LTR控制律优化设计 [J].控制与决策,2016,31(12):2248-2254.
(MA Rui,WU Hong-tao,DING Li.Optimal LQG/LTR controller for small-scale unmanned helicopter based on artificial bee colony algorithm [J].Control and Decision,2016,31(12):2248-2254.)
OptimizedcontrolforattitudevariablestructureofUAVbasedonrecurrentwaveletneuralnetworks
CHEN Gui-ping
(College of Big Data and Computer Science, Guizhou Normal University, Guiyang 550001, China)
The attitude control of unmanned aerial vehicle (UAV) is susceptible to the external air flow disturbance and model parameter perturbation.In order to improve the accuracy and stability of attitude control, an optimized robust control law was proposed based on variable structure control and recurrent wavelet neural networks.The attitude motion model for UAV was constructed and analyzed.A stabilized control law for the attitude motion of UAV was designed with the variable structure control.The recurrent wavelet neural networks were added into the control closed loop.Therefore, the variable structure control law could be optimized and the dependence of control law on the model accuracy could be weakened.In addition, the comparison with the traditional methods was performed in the simulation validation.The results show that the proposed control law can improve the stability of attitude control of UAV, and has strong robustness, shorter convergence time and less energy consumption, which proves the effectiveness and feasibility of the proposed method.
unmanned aerial vehicle; attitude control; variable structure control; recurrent wavelet neural network; optimized control; stability; robustness; energy consumption
2017-06-06.
贵州省科协专项及调研课题基金资助项目(201602).
陈贵平(1979-),男,贵州毕节人,副教授,硕士,主要从事大数据、信息安全和教育信息化等方面的研究.
* 本文已于2017-12-20 09∶59在中国知网优先数字出版.网络出版地址:http://kns.cnki.net/kcms/detail/21.1189.T.20171220.0920.004.html
10.7688/j.issn.1000-1646.2018.01.17
TP 273
A
1000-1646(2018)01-0094-05
钟 媛 英文审校:尹淑英)
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
体育科技文献通报(2022年3期)2022-05-23
作文中学版(2020年1期)2020-11-25
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
自动化学报(2018年2期)2018-04-12
通信电源技术(2016年4期)2016-04-04
北京航空航天大学学报(2016年3期)2016-02-27
植物营养与肥料学报(2014年1期)2014-03-11
