基于方位向模糊区位置去除虚假船的检测方法
2018-01-06 12:24徐凌云房红兵
电子设计工程 2017年23期
徐凌云,房红兵
(南京理工大学江苏南京210094)
基于方位向模糊区位置去除虚假船的检测方法
徐凌云,房红兵
(南京理工大学江苏南京210094)
模糊性是合成孔径雷达重要参数之一。在进行港口或是海面舰船检测时,当模糊区域能量过高会导致产生虚假目标。雷达照射到强散射物体时会产生虚假影像,严重影响对图像的判读,进而影响舰船目标检测的准确性。基于提高舰船检测准确性的目的,本文先从模糊性来源入手,通过分析计算方位向模糊值,并且结合虚假影像的特点提出了分块区域下通过方位向模糊区位置,鉴别虚假目标,最后通过实际数据分析验证了该方法的有效性,提高舰船检测的准确性。
合成孔径雷达(SAR);方位向模糊度;模糊区;舰船检测
方位向模糊性[1-3]作为星载合成孔径雷达(synthetic aperture radar,SAR)固有的一种特性,对于目标检测与识别会照成干扰,在舰船检测时当模糊严重时会出现虚假目标,对目标舰船检测造成严重干扰。
现今在国内外研究SAR方位模糊抑制大多从信号角度出发,如:理想滤波器抑制[4],自适应方位模糊抑制[5],三滤波器方位模糊抑制[6]等。上述方法针对点目标会有比较好的效果,但是大多计算量偏大。本文提出了一种的处理方法:从计算分块区域[7]模糊区位置的角度,来进行舰船目标分析检测,通过判断模糊位置来是否存在,抑制模糊,降低图像模糊程度,进而提高检测准确度。
1 方位向模糊来源以及计算方法
多普勒频谱的欠采样[8]是导致方位向模糊的主要原因。由于雷达的脉冲重复采样的工作机制而且天线总是存在旁瓣的,导致方位向模糊度成为一种无法消除的系统干扰。虽然在处理成像区回波信号的主瓣区域内的信号,但是无论如何设计优化天线,天线总是存在旁瓣的。脉冲采样时,前一个或是后一个周期信号的旁瓣信号延伸叠加到方位向主瓣信号中来,使得主瓣信号被周期性的混跌,从而造成了方位向模糊。
在条带模式下,天线指向不发生变化,在整个照射过程中,所有具有相同斜距,不同方位位置的目标,其经历的天线方向图过程是一致的,都是先经历方向图旁瓣再经历主瓣再离开主瓣进入旁瓣。整个成像过程成像区域I与雷达的运动可以等效成成像区域与天线方向图之间的运动。一般情况会假设目标的后向散射系数在整个天线方向图中不发生变化[9]。
为了方便地测度方位模糊,通常把在方位向处理器带宽内,模糊噪声能量与回波信号能量之比称为方位模糊度[10]。其表达式为:
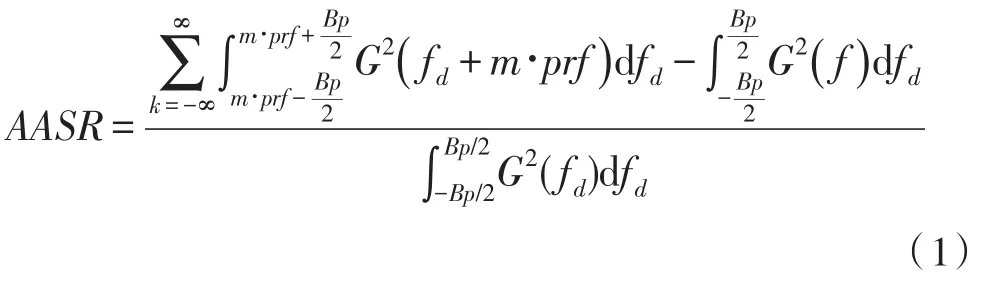
Bp:方位向带宽,一般会选取3 db点,工程上计算一般会选取方位向方向图-6 db处带宽,留取一定余量后选择-8db左右。k:方位模糊序号,一般选取-20~20,天线方向图远区旁瓣总是较小,模糊能量主要集中在+1模糊区。G:双程方位向天线方向图,标准的天线方向图表达式[11]为:

其中La方位向天线尺寸,λ波长,φ方位角,
fd:为方位向多普勒频率;

r⇀:SAR与地面目标之间的相对距离矢量,v⇀:相对速度矢量。
在整个雷达照射成像过程中,某一区域的方位向模糊度一般是max(AASR),将该区域内最大AASR设为该区域的方位向模糊度。条带模式下,因SAR天线的波束指向不发生改变,成像区域内的各个点目标所经历的过程是一致的,并且具有相同的斜距,所以其AASR是相同的。
2 基于分块区域模糊区位置计算
上面阐述了方位向模糊计算的方法,主信号区与模糊区存在一定的距离偏移,对于点目标而言,因模糊能量主要在±1模糊区,同样的分块大区域的目标区域同样是能量集中在±1模糊区内,下面主要分析计算方位向和距离向模糊区与目标主信号区的距离。以及在实际场景中的应用分析。
方位向模糊区与目标观测区具有相同的斜距,其中多普勒中心频率的差距也由脉冲重复频率决定,可以根据已知的多普勒参数[12]以及其与的卫星参数,求得±1模糊区与目标观测区的地面位置关系[13]。

Xa:目标与模糊区之间的方位向距离;N:间隔的像素;ρa:方位向分辨率;prf:脉冲重复频率;fr:多普勒调频率;p0,p1,p2,p3:各阶调频系数;rx0:目标的斜距;rref:参考斜距。
文中提出了一种基于模糊区位置计算的提高舰船检测精度的处理方法,主要思想:先计算SAR图像的方位向模糊值,如果方位向模糊值严重,那么很可能存在虚假目标。然后SAR原始图像先进行区域分块舰船目标检测,标记舰船目标,计算区域目标内对于可能模糊船存在的位置,然后根据模糊区位置内平均能量分布以及舰船特征[14-16](大小,形状,船朝向等)判断该处的舰船是否为虚假目标,如若是虚假目标则去除虚假舰船,处理完毕以后再与原始图像进行效果比较。具体流程如图1所示。

图1 分块区域模糊区的舰船检测流程图
3 实验分析
本次实验采用新加波港口的TerraSAR数据作为分析验证。其各个参数如表1所示。
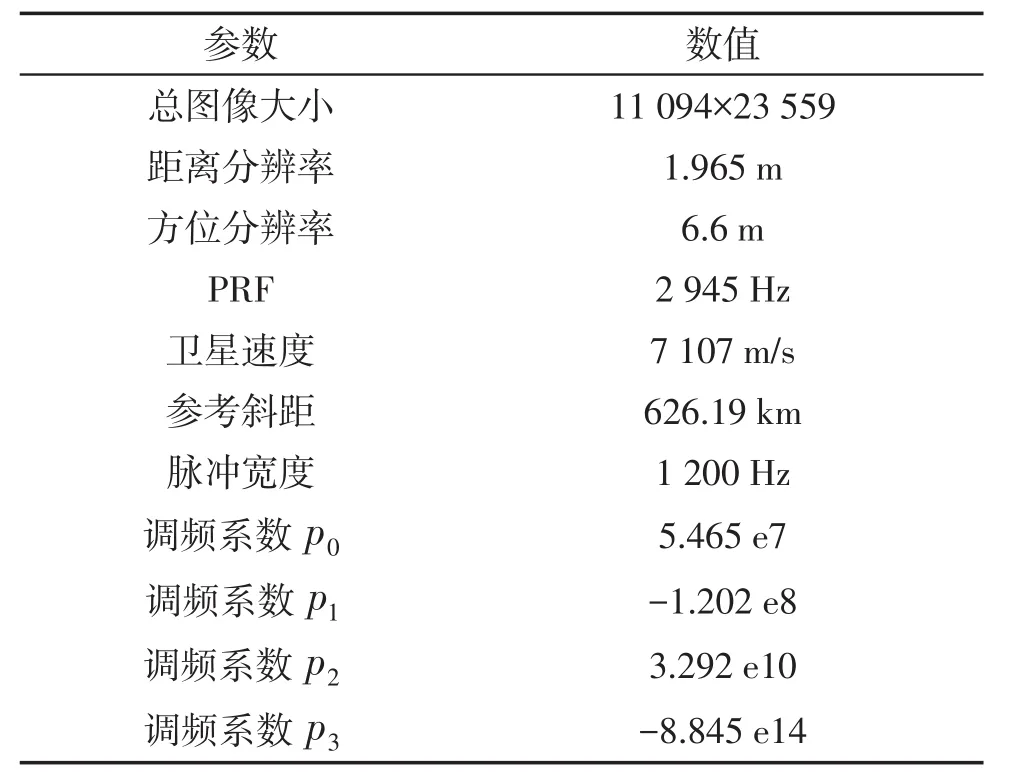
表1 新加坡港口TerraSAR条带模式数据相关参数
为了验证本文提出的基于方位向模糊区的舰船检测算法的有效性,本次分析截取了SAR图像中一部分作为海域进行试。雷达的实测数据成像以后,将该模型中的舰船目标标记为Q0,Q1,Q2…通过式(1)计算该图像的方位向模糊AASR为-14.145 db,而一般方位向模糊度会优于-20 db,该SAR图像方位向模糊比较严重,可以初步判断该图像中很可能存在模糊像。
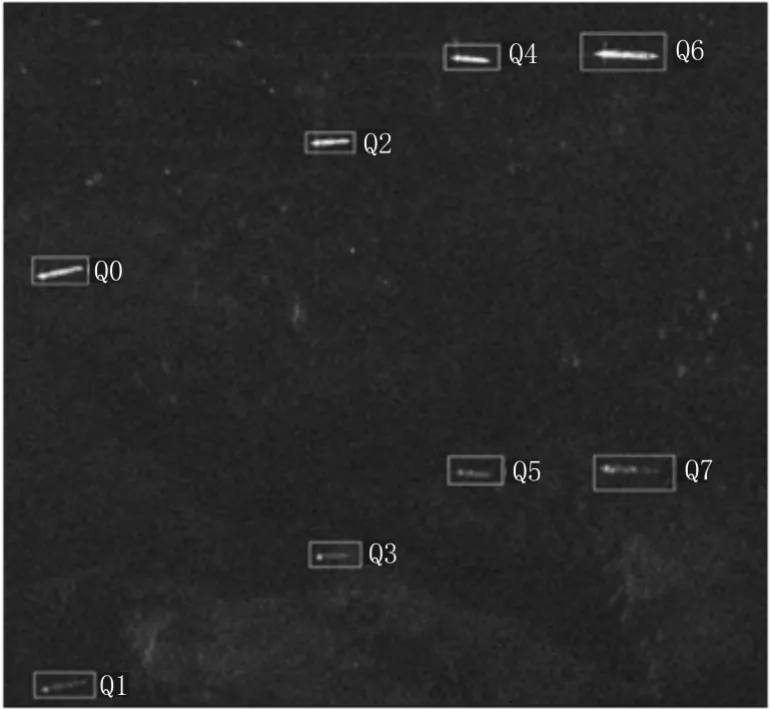
图2 舰船初步监测到的舰船目标
图2标的舰船目标如果用传统的舰船检测方法来检测,像Q1,Q3,Q5,Q7这些疑似舰船目标就会直接被当成舰船目标,很大程度影响舰船目标检测的准确性。根据本文提出的方法:根据方位向模糊区来检测舰船的,首先会将图像中监测到的所有的舰船目标标记为Q0,Q1,Q2…,其次将各舰船目标方位向+1模糊区计算出来,标为Q0_,Q0+,Q1_,Q1+,Q2_,Q2+…。再将检测出的+1模糊区标记目标与图中舰船目标先进行位置重合度对比,如果位置重合再进行舰船特征对比,根据各个参考参数如舰船距离向位置重合度,舰船大小,舰船首向,能量分布,判断区域内的那些舰船目标为模糊船,判断完毕以后消除模糊船。
图3舰船目标Q0,Q2,Q4,Q6的位置,根据之前提出的分块大区域求模糊区位置的方法,计算得到各个舰船目标的模糊区位置。舰船目标与其方位向模糊区在同一景图像中且具有相同的距离向位置关系,根据区域方位向模糊区计算方法,求得Q0,Q2,Q4,Q6舰船目标的+1模糊区方位向位置相差约1552*6.6,分别用标记为 Q0_,Q0+,Q2_,Q2+,Q4+,Q4_,Q6_,Q6+因图像大小限制部分大小,中只存在Q0_,Q2_,Q4_,Q6_。 不 难 发 现 Q0_,Q2_,Q4_,Q6_,位置基本Q1,Q3,Q5,Q7重合。
该图像的AASR=-14.145 db<-20 db,初步判断该图像方位向模糊严重,从图中就可以明显看出,不少舰船目标存在着疑似模糊像。
图4为各舰船目标切片,接着我们通过对比,其中舰船目标Q0与Q1,Q2与Q3,Q4与Q5,Q6与Q7外形轮廓特征相似并且在坐标位置上都存在一定的距离关系,可以初步判断为模糊船。

图3 舰船目标模糊区位置
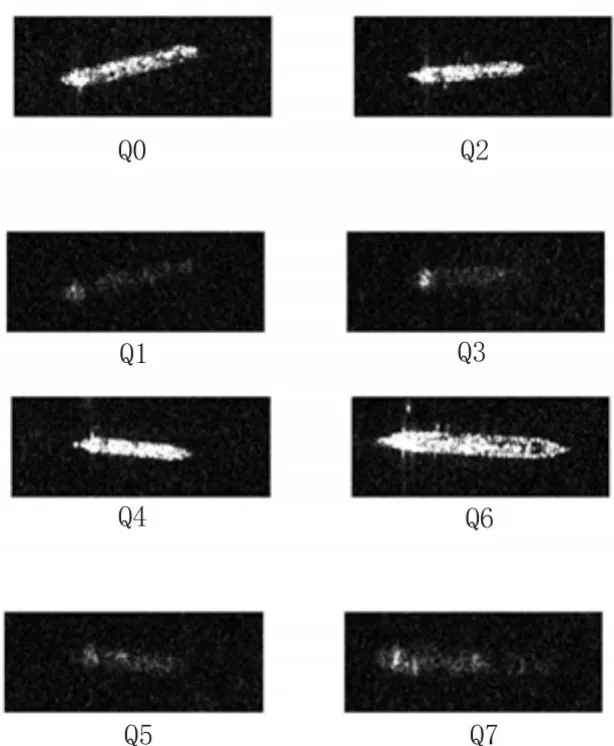
图4 各舰船目标
接着对各舰船目标进行目标检测算法后进行目标特征提取,如图5。特征提取包括轮廓提取,舰船朝向,舰船大小等。
从图5可以看出实际舰船目标与虚假舰船在能量分布上还是有很大差异的,实际舰船能量集中,虚假舰船能量较弱,但是实际舰船与虚假舰船在舰船中存在二面角的等强散射点处还是有一定相似度。表2为该区域内舰船目标检测出的各特征参数结果的比较。

图5 各舰船目标特征提取
根据表2可得其中舰船目标Q0的模糊区Q0+中心的坐标位置[759,16309],与舰船目标Q1中心位置[760,16275]基本重合。并且Q0舰船特征(舰船首向,舰船大小)和Q1非常相近。同时分析其舰船能量与场景平均能量,因为是模糊像,其包含的能量相对与原始像会低一个数量级,可以判断Q1为Q0的虚假目标。同样的Q2与Q3,Q4与Q5,Q6与Q7也存在着这样的关系,可以将那些模糊船判断为模糊船。
通过方位向模糊区来检测舰船的算法计算,处理掉模糊船后的图像,从处理结果上,确检测4个Q0,Q2,Q4,Q6,正确检测率100%。该区域中单单通过CFAR,检测8个目标,正确检测4个Q0,Q2,Q4,Q6,虚警值 4 个 Q1,Q3,Q5,Q7,正确检测率只有50%。并且该方法处理时间较短只有3 s,图像中模糊干扰已经大部分去除,且真正的舰船目标没有改变,很大程度提高了舰船检测的准确性。

表2 舰船目标特性参数
4 结论
模糊度问题是影响舰船检测中一个复杂的问题。本文先从合成孔径雷达方位向模糊的来源以及计算出发,提出了基于计算方位向模糊区,再结合舰船特征去除模糊像提高舰船检测准确度的方法,最后去除了虚假目标。本次实验在低分辨率且方位向模糊较严重的SAR图像中,效果较好,大大增强了目标检测的准确性。如要验证该方法的适用性,还需要经过不同分辨率不同场景大量数据测试。
[1]杨桃丽.星载多通道高分辨宽测绘带合成孔径雷达成像方法研究[D].西安:西安电子科技大学,2014.
[2]魏钜杰,李平湘,杨杰,等.利用全极化SAR方位向模糊的舰船目标检测方法[J].测绘学报,2013,42(4):430-439.
[3]陈祺,黄海风,余安喜,等.一种改善交叉极化距离模糊度的新工作模式[J].电波科学学报,2013,28(6):1082-1087.
[4]Alberto Moreira,Pau Prats-Iraola,Marwan Younis,et al.A tutorial on synthetic aperture radar[D].Microwaves and Radar Institute of the German Aerospace Center(DLR),Germany,2013.
[5]Michelangelo Villano,Gerhard Krieger,Alberto Moreira.Ambiguities and image quality in staggered SAR[D].Microwaves and Radar Institute German Aerospace Center(DLR) Wessling,Germany,2015.
[6]BudhadityaPyne,Vinay Ravindra.An improved pulse repetition frequency selection scheme for syntheticapertureradar[C]//DepartmentofElectricalEngineering and Information Systems (EEIS)University of Tokyo Tokyo,Japan,2015.
[7]吴正升,韩冰,周春平.一种改进的SAR图像方位模糊抑制方法[J].测绘通报,2014(S0):149-152.
[8]张平,李震,陈权,等.合成孔径雷达自回归线性预测带宽外推超分辨率成像算法[J].中南大学学报(自然科学版),2015,46(7):2539-2548.
[9]李财品,何明一.地球同步轨道SAR方位向模糊度研究[J].信号处理,2015,31(6):694-701.
[10]洪文,杨士林,李洋,等.分布式目标的极化SAR距离模糊计算方法研究[J].电子与信息学报,2015,37(6):1437-1442.
[11]席龙梅,盛磊,葛家龙.星载滑动聚束SAR模糊特性分析与仿真[J].上海航天,2011(1):1-6.
[12]徐辉,赵迪,辛培泉,等.星载SAR方位模糊研究[J].火控雷达技术,2011,40(2):1-5.
[13]韩伟,韩冰,雷斌,等.一种改进的理想滤波器方位模糊抑制方法[J].电子测量技术,2011,34(5):25-33.
[14]山鹏.SAR图像舰船目标检测及特征提取方法研究[D].哈尔滨:哈尔滨工程大学,2012.
[15]段崇雯.基于SAR成像的海面舰船目标特征参数估计[D].长沙:国防科学技术大学,2013.
[16]郭磊,王宇,邓云凯,等.基于方位向相位编码技术的方位向多通道SAR距离模糊抑制方法[J].电子与信息学报,2015,37(3):601-607.
The way of detection of false ships based on azimuth ambiguities
XU Ling-yun,FANG Hong-bing
(Nanjing Universityof Science and Technology,Nanjing210094,China)
The ambiguity is one of the important parameters of synthetic aperture radar.when Port or sea ships detected,the fuzzy region energy is too high will result in a false target。The radar radiation will produce a false image to the strong scattering object,a serious impact on the interpretation of the image,thereby affecting the ship target detection accuracy.This paper begins with the source of ambiguity by calculating the azimuth ambiguity.and combined the characteristics of a false image presented by a large area under the block azimuth distance to the twilight zone location,identification of false targets.Finally,analysis the actual data and improve ship detection accuracy.
Synthetic Aperture Radar(SAR);azimuth ambiguity;fuzzy zone;ship detection
TN959.1
A
1674-6236(2017)23-0073-04
2016-09-26稿件编号:201609229
徐凌云(1991—),男,浙江金华人,硕士。研究方向:信号与信息处理、图像处理。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年11期)2022-07-15
幼儿园(2021年12期)2021-11-06
舰船科学技术(2021年12期)2021-03-29
海军航空大学学报(2020年2期)2020-07-27
电子技术与软件工程(2017年12期)2017-07-05
电测与仪表(2016年14期)2016-04-11
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
舰船科学技术(2016年1期)2016-02-27