航天动力学软件发展评述1)
2018-01-06 02:36罗亚中孙振江
力学与实践 2017年6期
罗亚中 孙振江 乔 栋
∗(国防科技大学空天科学学院,长沙410073)
†(北京理工大学宇航学院,北京 100081)
航天动力学软件发展评述1)
罗亚中∗,2)孙振江∗乔 栋†
∗(国防科技大学空天科学学院,长沙410073)
†(北京理工大学宇航学院,北京 100081)
航天动力学软件是航天动力学理论与工程实践联通的桥梁,可以显著提高航天任务分析设计效率和水平.国际上已有一系列成熟的软件但多对我国禁运.近年来国内在航天动力学理论研究与工程应用方面均有长足发展,但成熟航天动力学软件方面几乎还是空白.本文从航天任务仿真分析和航天器轨迹优化两个方面综述国际上航天动力学软件的发展情况,着重介绍了典型的开源和商业软件,包括JAT,STK,Free fl yer,POST和ASTOS等.简单评述了国内航天动力学软件的发展情况.总结了各类航天动力学软件的技术特点,给出了对我国研制成熟航天动力学软件的启示和初步建议.
航天动力学,软件系统,任务分析,轨迹优化
1957年苏联发射世界上第一颗人造卫星以来,人类开展了大量的航天任务.这些航天任务不仅加深了人类对宇宙的认知,更深刻改变了人们的生活,为社会进步提供了重要动力.航天动力学是航天任务的核心要素,它是连接任务构想与工程实现的桥梁,既决定航天任务的可行性与合理性,又指导航天器的设计目标与制造要求,在航天任务分析与设计中发挥着至关重要的作用[1].随着航天技术的不断进步,航天任务分析与设计工作复用性需求也不断增加,因此自主化、标准化、适用性广的航天动力学软件应运而生.
作为面向航天领域研究和应用的专业软件,航天动力学软件是航天动力学、科学计算方法、软件工程等多项技术的交叉成果.借助于“阿波罗”计划、国际空间站、“好奇号”火星探测、“罗塞塔”彗星探测等重大工程任务,航天动力学软件也逐步从针对特定任务、功能单一、操作复杂的专业程序发展为通用化、功能多样化、操作简单的通用工具软件.这些通用工具软件的出现,提高了任务设计的效率和水平,降低了人力和物力成本,增加了任务的可靠性,反过来也促进了航天工程的发展.经过几十年的发展,国外已经形成了一批成熟的航天动力学软件,如侧重于任务仿真分析的STK,FreeFlyer等,以及侧重于航天器轨迹优化的POST,ASTOS等.这些软件成熟度和可靠性好,广泛应用于多个航天任务中.时至今日,航天动力学软件已经成为航天任务分析与设计中不可缺少的关键工具.
近年来随着我国载人航天、探月工程、二代导航等重大航天工程的推进,我国航天动力学研究在交会对接[23]、编队与星座[45]、深空探测[67]等多个领域取得了长足发展;但与国外相比,在航天动力学软件研制方面差距显著,尚未形成有影响力的软件产品.我国从20世纪90年代开始陆续引进国外航天动力学软件,但随着我国航天实力的提升,国外加紧对我国进行技术封锁,如目前最为成熟的航天任务仿真分析商业软件STK,在7.0版本以后全面对华禁运,NASA于2017年新公布的一系列开源软件多数也对我国用户进行限制.面对国外的技术封锁以及我国航天技术长期发展需要,研发具有自主知识产权的航天动力学软件尤为迫切.本文综述了国内外航天动力学软件的发展概况,着重从任务仿真分析和轨迹设计优化两个方面总结介绍国际上较为成熟的开源软件和商业软件发展情况,以期对我国航天动力学软件的发展有所启示.
1 国际上航天任务仿真分析软件发展概述
航天任务仿真分析包括航天任务流程分析、航天器系统分析与优化、轨道和姿态动力学分析、导航控制设计和任务寿命分析等方面,侧重于航天动力学正问题的分析求解,可以为航天任务提供全面详细的参数分析,广泛应用于航天任务的初步设计与方案验证中.
航天任务仿真分析软件早期多是以通用程序库形式存在,在此基础上,逐步演变形成了一系列开源和商业软件.
1.1 通用程序库
早期的航天任务仿真分析软件是以函数库和类库形式的仿真分析程序包出现的,并结合当下的计算机主流语言更新程序库,其中较为著名的有Meeus[8]编写的C++天文算法库、Huss编写的Java程序包[9]以及天文观测机构STScI研发的FITS工具包等[10].另外,国际天文联合会IAU还联合多家机构发布了关于天文坐标系统及地球姿态模型的基础天文标准库 SOFA[11],可进行天文历法计算、时间计算、星历表计算、岁差章动计算等,旨在为天文计算提供权威有效的算法程序和常数数值.
航天任务仿真分析程序包作为基础类函数库,应用广泛,但是存在三点不足:一是操作复杂,要求研究人员具有较高的编程能力;二是这类程序包主要用于航天任务中某一方面的分析与仿真,功能单一;三是各个程序包之间缺乏接口,无法实现互联.
这些程序包的开发为航天任务仿真分析软件奠定了扎实的基础,并由此而进一步发展为专业软件.
1.2 开源软件
1.2.1 发展历程
开源软件具有发展迅速、组织灵活以及代码开源共享等优点.航天任务仿真分析的开源软件多起步于20世纪90年代,逐步形成了包括Orbiter,JAT等一系列开源软件.
多天体交会轨道设计工具 STOUR (Satellite Tour Design Program)[12],由美国航空航天局(NASA)下属的喷气推进实验室主导在1983年开始开发,该软件采用基于圆锥曲线拼接方法,分析设计行星际探测轨道.后来经过不断的升级,特别是加强了设计优化能力,逐渐演化为发射机会自动化搜索软件STOURA[13]和深空探测轨道设计优化软件MIDAS(Multidisciplinary Integrated Design As-sistant for Spacecraft)[14].
美国伊利诺斯大学 Gregory于 1996年开发的WinOrbit[15],采用Windows平台下的Basic语言编写,实现卫星运动实时演示,并生成地球卫星的跟踪数据和星历信息,该软件在1998年以后不再维护升级.
同期英国学者研制了用于星座轨道和覆盖分析的可视化软件Savi(Satellite Visualization)[16],目前部署在Sourceforge Repository软件共享平台,仍在不断升级和扩展应用中,该软件可在Windows,Macintosh OS X,Linux和Unix等多个操作系统环境中运行.
2000年,Schweiger[1718]将真实行星运动模型、航天动力学以及引力场、大气环境模型与面向任务高度定制化功能结合,推出航天动力学演示软件Orbiter.该软件采用插件机制,各种航天任务和航天器都可以制作成插件加入Orbiter软件中,该软件目前仍在不断升级与扩展应用中.
2002年,意大利帕多瓦大学研发了轨道重构分析航天动力学软件 ORSA(Orbit Reconstruction,Simulation and Analysis)[1920],具有高精度数值算法,可从MPC,JPL,Lowell,ASTDYS,NEODYS等星历数据库中导入行星和彗星数据.
2003年,美国维吉尼亚技术研究州立大学的Turner[21]开发了一款开源可扩展航天仿真建模软件Open-SESSAME,涵盖了常用的数值算法、坐标转换、高精度预报算法、引力体模型及摄动模型,同时具有系统与硬件间的网络通信、系统级模型管理等功能,在研究生教育等方面取得了广泛应用效果[22].
2005年,欧洲空间局 (ESA)启动了开源航天动力学可视化仿真软件项目 STA(Space Trajectory Analysis),功能定位与STK的轨道仿真分析模块类似,用于航天动力学仿真、可视化和数据分析[23].STA基于QT开发,可视化引擎采用了基于OpenGL的Celestia,可跨平台在Windows、Linux和Mac OS运行.2013年之后,ESA关闭了该项目的官方网址,并删除了在开源社区发布的源代码.
为推动航天技术的民用化和商业化,作为NASA“技术转让计划”(technology transfer program)的一部分,NASA于2017年公布了第三版免费开源软件目录[24],其中包括了戈达德飞行中心(GSFC)参与开发的系列免费开源软件[25],如Java航天动力学工具箱JAT(Java Astrodynamics Toolkit)[2628]、通用任务分析工具GMAT(General Mission Analysis Tool)[2930]和进化任务轨道生成器 EMTG(Evolutionary Mission Trajectory Generator)[31]等.
1.2.2 典型软件
(1)JAT
JAT是由德克萨斯大学计算机科学系与NASA戈达德飞行中心合作开发的开源航天任务仿真分析软件[2628],新近在工业界及学术界受到了推崇.包括NASA在内的多个航天机构使用JAT进行航天任务的仿真分析,是全球最先进的航天动力学工具包之一.
主要功能及特点包括:① JAT提供 6自由度飞行器模拟仿真,具备丰富的 2D和 3D可视化功能.②强大的模型库.多种坐标和时间系统模型、轨道动力学模型(相对运动、摄动、星历、有限推力)、姿态动力学模拟(重力梯度、飞轮、姿态确定)和导航系统模型(陆基导航、星间导航、多种滤波方式选择).③良好的用户程序库接口.JAT为用户提供了航天动力学、任务设计、航天器导航制导控制等方面的程序库,提供了与MATLAB交互接口,用户可据此开发特定应用软件,具有形式灵活、研发周期短等特点.④具有一定的设计优化能力.提供多种非线性规划求解器,可用于轨道修正和打靶等非线性问题求解.
(2)GMAT
GMAT是一款由 NASA戈达德太空中心开发的基于 MATLAB开源轨道任务分析软件[2930],GMAT目前已应用于多项深空任务,包括月球勘察轨道器 (lunar reconnaissance orbiter),OSIRIS-Rex和MAVEN等.其主要功能及特点包括:①面向深空探测任务的完善分析仿真能力,可以实现探测器动力学及空间环境的精确建模,推进系统建模与燃耗寿命分析,敏感性和蒙特卡洛分析,导航数据仿真等功能,并具备三维可视化功能.②具备较强大的设计优化能力,可实现脉冲推力和有限推力轨道设计与优化.③良好的用户接口功能.GMAT拥有通过交互GUI界面驱动和用户自定义脚本语言两种工作方式,同时该软件提供了多个插件和系统接口,具备较强的扩展能力,用户可以自行在软件中添加子模块或进行二次开发.
1.2.3 评述
尽管开源分析软件具有发展迅速、组织灵活以及代码开源共享等优点,但大多数由个人学者开发的软件具有发展盲目性大、易碎片化、更新维护不稳定等问题,而且软件质量参差不齐,计算精度和效率难以信赖.而由NASA的JPL,GSFC等机构组织或参与开发的软件,软件质量和计算精度高,功能强大,但是均采用了分级授权的机制,仅有部分软件面向全球公众开源,如上述JAT,GMAT和EMTG等.大部分核心算法软件仅面向美国本土民众开源,且获取时需要提供详细的组织和个人信息进行身份确认,如上述MIDAS,有些甚至仅供美国政府人员使用.
1.3 商业软件
1.3.1 发展历程
与开源仿真分析软件相对应的是由商业公司开发的软件,这类软件具有更丰富的功能,交互式的用户界面以及完善的软件维护与升级机制.近30年来,美国多个公司研发了包括STK,FreeFlyer等多个成熟的商业仿真分析软件.
目前航天仿真分析领域中应用最为广泛的商业软件是AGI公司1991年开始推出的卫星工具箱软件 STK(Satellite Tool Kit).早期的 STK软件 (时间 1991–2002,版本 1.0-4.3)面向全球免费使用,国内也在1997年(STK4.03)开始引进使用.随后,在获得较为广泛的使用之后,2003年AGI公司宣布STK5.0以上版本成为商业付费软件,并且部分功能模块(雷达高级环境模块、导弹任务模块等)开始对中国大陆进行禁运,并于2005年(7.0版本)对中国大陆全面禁运.2012年(STK 10.0),STK软件更名为系统工具箱(Systems Tool Kit)[32],突出其系统设计与分析能力.经过多年的迭代发展,STK支持从概念设计到发射运行再到寿命结束的全过程航天任务,具备陆、海、空、天全系统的仿真分析能力,已经成为航天仿真分析领域中绝对领先的商业软件[33].
1999年美国 A.I.Solutions公司推出了一款跨 Windows和 Linux平台的航天动力学软件FreeFlyer,最新是2016年 12月的7.2版本[34].该软件不仅具备精确轨道建模、机动建模、传感器建模、空间环境建模、机动估计、轨道确定、跟踪数据仿真、二维/三维可视化、绘制分析结果图表等功能,还提供了脚本语言编程和多种外部接口二次开发的能力,可用于轨道和姿态仿真动力学实时处理、卫星覆盖和可见性分析、卫星机动编队构形及空间碎片避撞分析等问题.
2000年,AVM Dynamic公司发布星座工具集SC Modeler,主要用于星座的设计、可视化和分析,提供了一个集成建模环境以及附加工具,包括星座设计模块、覆盖分析模块、约束分析模块、网络拓扑工具等,2017年3月更新到了3.5版本[35].
2003年,普利斯顿卫星系统公司 PSS 利用 MATLAB脚本文件开发了航天器控制工具箱SCT(Spacecraft Control Toolbox),用于控制系统辅助设计[36].PSS还额外提供面向SCT专业版的编队飞行模块、旋转轴模块、太阳帆模块和核推进模块插件,用于编队飞行、火箭发射、太阳帆、转移轨道姿态确定等任务的分析.
1.3.2 典型软件
(1)STK
STK是目前最成功的商业化航天任务仿真分析软件.其主要功能与特点包括:①复杂实体建模.软件能够完成飞机、卫星、地面车辆、舰船以及传感器等多个复杂实体建模任务.②优异的仿真分析能力.STK包含Astrogator、覆盖模块、通信与雷达模块等诸多模块,从而支持轨道设计和机动规划、航天器和任务设计等多种任务分析.③计算结果的可靠性.通过全球绝大多数专业机构和专业人士的长期使用,以及内部、NASA软件对比验证,其算法十分精确稳定,提供的结果在业界具有极高的权威性.④强大的交互式图文输出能力.STK不仅能够提供易于理解的动态、静态图表和文本形式的分析结果,并且能够根据用户需求定制输出数据类型,极大地提高了数据分析能力.⑤极强的可扩展性.STK提供丰富的应用程序编程接口和函数库,用户能够单独调用某一函数,也能够与Visual Studio、MATLAB等软件进行协同仿真分析.
(2)Free flyer
FreeFlyer的计算正确性和精度已得到多次飞行任务验证,用户包括 NASA、美国国家海洋和大气管理局、美国空军、美国国防部和多个商业卫星供应商.其主要功能和特点包括:①丰富强大的功能.FreeFlyer具有轨道预报、星座设计、覆盖分析、机动规划、Monte Carlo仿真、轨道确定、深空轨道分析、二维/三维可视化、结果报告和数据图表等功能.②多样化接口与二次开发集成功能.FreeFlyer具有多种灵活的配置选项,包括定制化用户接口、Windows和Linux跨平台支持和程序API接口,支持基于C/C++、C#和Java的集成与二次开发;提供MATLAB、TCP/IP等多种外部程序和数据库的专用接口;基于FreeFlyer的地面系统可与任意第三方测控系统和外部工具集成.
(3)Geodyn
Geodyn是一种定轨和大地参数推估软件[37],其核心是卫星轨道动力学,也属于航天任务仿真分析软件的范畴.Geodyn软件最早于 20世纪 70年代由NASA开发,并于80年代推出了第二代产品Geodyn-II.Geodyn软件的应用非常广泛,包括近地轨道任务Jason,CHAMP,GRACE等,以及行星际探测任务NEAR,LRO,MGS,SELENE等[38].
Geodyn-II软件包括了两种模式:第一种模式是轨道积分模式,即给定中心天体重力场系数和其他保守力场、非保守力场的参数,并给定某时刻初始轨道值,计算一定时间内的轨道数据.这一模式主要利用Cowell积分方法来计算得到.第二种模式是参数估计模式,即给定卫星轨道数据来反解中心天体或其他保守、非保守力场的参数.这一模式是利用贝叶斯最小二乘法进行拟合推估得到的.因此,该软件不仅适用于地球,也适用于月球、火星等行星环境.1.3.3评述
商业航天任务仿真分析软件功能丰富且计算精度高,但用户通常需要授权使用,维护成本较高.同时受到政治因素的影响,我国无法及时获取相关软件,比如 STK中的导弹飞行工具 MFT、拦截飞行工具IFT等模块长期对我国禁运,在STK 7.0版本之后,美国更是彻底禁运了该软件.
2 国际上航天器轨迹优化软件发展概述
航天任务仿真分析软件侧重于航天动力学正问题的分析求解,航天动力学另一类重要问题是逆问题,其中以航天器轨迹优化问题最具代表性.航天器轨迹优化贯穿航天任务全寿命周期,其对于提升航天任务性能指标,包括降低运载器起飞质量,增大有效载荷质量,延长航天器在轨运行寿命等方面具有重要的价值.正因为如此,自20世纪60年代以来,航天器轨迹优化一直是航天任务分析与设计中,特别是航天器总体设计及控制方面最重要的研究课题之一,也是工程优化领域发展最为蓬勃的分支之一.随着轨迹优化技术的发展进步,出现了多个成熟的轨迹优化软件.目前,可将国际上航天器轨迹优化软件分为内部软件、开源软件和商业软件三类.需要指出的是,上一节介绍的任务仿真分析软件中,多个软件也具备了针对逆问题的一定迭代优化求解能力,但软件侧重擅长的还是仿真分析.
2.1 内部软件
2.1.1 发展历程
航天器轨迹优化技术源自20世纪50年代兴起的最优控制理论,20世纪60年代后,基于变分法和极小值原理的轨迹优化方法 –– 间接法不断发展成熟,但该方法依赖于具体问题,不便于程序化.得益于商业计算机的普及和计算技术的发展,自20世纪70年代以来,航天器轨迹优化方法的另一个分支––直接法逐渐得到重视与发展.直接法的一个显著优点是便于程序化,因此伴随着直接法和数值优化算法的发展,产生了一大批成熟的航天器轨迹优化软件[39].
发展成熟最早的直接法是 20世纪 70年代的直接打靶法,采用直接打靶法的典型轨迹优化软件是POST(the Program to Optimize Simulated Trajectories)[40]和GTS(Generalized Trajectory Simulation)[41].从20世纪70年代研制成功以来,一直在不断改进与拓展应用.
直接打靶法之后发展的是配点法. Chebytop是第一款采用配点法的轨迹优化软件[42],最初于1969年由波音公司的Johnson等编写,之后经波音和NASA的JPL、格伦研究中心多次改进.随着技术的发展,Chebytop的模型精度和优化性能已无法满足当前工程任务的需求,因此其也是目前唯一可以在NASA网站不经授权而直接下载的轨迹优化软件.20世纪80年代以来,随着配点法的成熟,出现了两款以配点法为基础的著名轨迹优化软件 OTIS(Optimal Trajectories by Implicit Simulation)[43]和SOSC(Sparse Optimal Control Software)[44],SOSC更是推广成为商业软件.
进入 21世纪以来,随着各类直接方法和大规模非线性规划算法的成熟应用,以及星际探测任务发展和小推力的广泛应用,NASA于 2002年启动了 LTTT 项目 (low thrust trajectory tool),研制新的小推力轨迹优化软件工具集.2006年发布了4款新的深空小推力轨迹优化软件,包括MALTO,Copernicus,OTIS和 Mystic[45].这 4款软件都已包含在NASA最新发布的第三版免费开源软件目录中[24],但由于高精度动力学模型和轨迹优化算法的重要性,只授权美国政府人员使用.
除了美国相关机构研制的上述软件,欧洲也研制了一系列轨迹优化软件包. 德国学者研制了较为通用的轨迹优化程序包 BNDSCOI[46]和DIRCOL[47],它们分别采用成熟的多重打靶法和配点法,前者更是轨迹优化领域的第一个开源软件.此外也包括基于间接法面向特定任务的软件,包括应用于运载火箭上升轨迹优化的 OPTAX(Optimization of Ariane’s Trajectories)和再入轨迹优化的ORAGE(Atmospheric Re-entry Optimization using Extended Gradient Method)[48].
2.1.2 典型软件
(1)POST和GTS
POST和 GTS主要是以运载火箭发射轨道优化问题为背景研制的,服务于大力神、德尔它、宇宙神和航天飞机等多个型号,在上升轨迹、再入轨迹优化等领域均取得了非常广泛的应用.其主要功能和特点包括:①采用直接打靶法进行最优控制问题参数化,优化求解器是梯度优化算法,早期优化算法是简约梯度优化算法,新近的版本引入了更为强大的序列二次规划算法.②较为丰富的模型库.POST和GTS提供了满足不同应用的大量模型库,包括不同坐标系下的动力学模型,多个重力场、推进和气动模型等.③提供了完善的仿真分析功能.新近研发的POST2可以支持同时进行多个飞行器的轨迹仿真分析、支持不同飞行阶段采用不同的仿真模型(三自由度或者六自由度)和Monte Carlo偏差仿真分析等.
(2)OTIS
OTIS是基于隐式积分的配点法轨迹优化软件,由波音公司于20世纪80年代开发,其后历经不断的修改完善,目前已更新到了4.0.18版本[24],支持隐式积分、显式积分和解析预报,优化方法由配点法改进为伪谱法,适用于飞机、导弹、再入航天器、高超飞行器、卫星、星际飞行等多个航空航天领域的轨迹优化问题.其主要功能和特点包括:①较高的计算精度和效率.OTIS基于配点法/伪谱法,支持隐式积分,内部自动归一化,计算精度高,并采用了最先进的非线性规划软件包SNOPT[49]作为优化求解器,提高计算效率.②方便的优化问题配置接口.OTIS允许用户自定义模型和目标函数,能够按照飞行阶段进行优化问题配置,包括各阶段的边界条件、路径约束,以及操纵律参数和发动机参数等控制参数.③较高的模型精度.OTIS的动力学模型库基于JPL星历,包含太阳系内的任意中心天体,而且可以考虑其他天体的引力摄动.
2.1.3 评述
这些内部软件都是由国外各大型航天机构组织、高校或商业公司研究人员参与研发,专门用以解决其实际工程任务中的航天器轨迹优化问题,因此不仅有精确的动力学模型库为基础,其核心算法也随着技术进步而不断改进完善,具有很高的精度和性能.
2.2 开源软件
2.2.1 发展历程
航天器轨迹优化作为非常具有代表性的最优控制问题,常被最优控制领域的学者作为典型应用对象,因此轨迹优化领域的开源软件多是面向通用领域的最优控制软件.
1989年,汉堡大学 Oberle等[46]发布了基于多重打靶法的轨迹优化软件包BNDSCO,标志着开源最优控制软件的诞生.此后,随着配点法和伪谱法的成熟和普及,涌现出了大批面向一般最优控制问题的开源软件.PSOPT是一款基于C++实现的伪谱法最优控制开源软件包[50],应用于巴西小行星探测任务 Aster的最优轨迹规划.GPOPS(General Pseudospectral Optimal Control Software)是一款基于MATLAB实现的伪谱法最优控制开源软件[51],可以实现多阶段的航天器轨迹优化设计.其他基于MATLAB实现的配点法最优控制开源软件还有DYNOPT[52]和 ICLOCS[53]等.
除了上述特定算法开源软件外,还有一些开源的最优控制问题求解通用框架,方便实现对不同算法的集成和应用,包括基于 C++开发的 ACADO Toolkit(Toolkit for Automatic Control and Dynamic Optimization)[54]和基于建模语言 Modelica的JModelica平台等[55].
2.2.2 典型软件
(1)GPOPS
GPOPS由美国佛罗里达大学基于 MATLAB开发,采用高斯伪谱法求解多阶段最优控制问题.其主要功能和特点:①较为方便的问题定义接口.GPOPS允许用户分别定义各阶段的最优控制问题,各阶段之间通过时间和状态变量连接.②算法自动化功能强,较可靠.算法内集成了自动归一化的功能,可以避免用户手动归一化最优控制问题的负担;还实现了约束雅可比矩阵的常导数与非常导数分离、高精度协态变量计算和自动差分等功能,以保证算法的精度和性能.
GPOPS由于其出众的性能,经不断改进和完善后发展出了 GPOPS-II,但不再是开源免费软件.相比GPOPS,GPOPS-II采用了自适应网格划分方法,各阶段的网格数量、宽度和多项式阶次均可变,并实现了稀疏导数逼近、同时近似一阶和二阶导数等改进,因此能更有效地求解非线性最优控制问题.
2.2.3 评述
在软件领域,通常开源软件的更新和维护不稳定、质量良莠不齐.但在轨迹优化和最优控制领域的上述开源软件质量均较高,代码共享使得可以在其基础上进行二次开发和改进,或针对特定问题进行适应性改造,有较好的应用效果.因此包括GPOPS等开源软件,在航天领域的推广应用非常普及.当然,这些开源软件大多面向一般的最优控制问题,缺乏高精度的航天动力学模型库,因此计算精度不易保证,需要用户自行解决.此外,由于是开源,算法性能有一定局限,随着算法的进一步提升,这类软件也多数不再继续开源,像GPOPS-II只面向美国用户收费授权.
2.3 商业软件
2.3.1 发展历程
随着配点法和伪谱法等最优控制算法不断成熟和最优控制工程应用的不断推广,以及航天技术的民用化和商业化不断推进,成熟的商业化航天器轨迹优化软件不断涌现出来.
其中以 ASTOS(Aerospace Trajectory Optimization Software)最为著名[56],早期版本名称为ALTOS[57],以优化软件GESOP(Graphical Environment for Simulation and Optimization)为核心[58],后者集成了多重打靶法和配点法标准程序包.ASTOS的最初开发是由德国 Well于 1989年在德国航天中心启动,此后Well来到德国斯图加特大学,软件的可用性得到了大幅提升,1999年ASTOS开始商业化.ASTOS的核心部分 GESOP作为一个标准工具,应用到了非航天领域.由于市场的不断扩大,2006年成立了 Astos Solutions GmbH公司经营该产品.目前 Astos Solutions的产品除 ASTOS和GESOP外,还包括专用于小推力的轨迹优化软件LOTOS、针对稀疏问题的优化套件SOS等.
与ASTOS同期商业化的另一款软件是 SOCS(Sparse Optimal Control Systems)[44],由轨迹优化领域著名美国学者Betts研制[59],由波音公司推广为一套商业软件,不仅应用于航天器轨迹优化领域,也推广到化工过程控制、机器人路径确定等领域.该软件在2001年被ASTOS集成,作为小推力任务设计的优化器.SOCS采用Fortran语言编写,采用B-样条插值的配点法,优化算法是由Betts和Huffman开发的稀疏序列二次规划算法包SPRNLP[59],软件具有C和MATLAB接口.ASTOS和SOCS核心算法均是配点法.
2000年以后伪谱法得到了长足发展,出现了多个伪谱法最优控制软件,其中 DIDO(Direct and InDirect Optimization)是一款较为成功的商业软件[60],目前由美国Elissar Global公司运营,在2006年经过了国际空间站零燃料机动的飞行验证[61],被美国学术界、工业界和NASA广泛应用.
其他成熟的商业航天器轨迹优化软件还包括:由佛罗里达大学开源软件 GPOPS发展而来的GPOPS-II[62],美国 SpaceWorks Software公司的鲁棒轨迹优化软件QuickShot[63],美国Space Flight Solutions公司的脉冲轨迹优化软件MAnE和小推力轨迹优化软件HILTOP[64],以及基于MATLAB的优化问题求解平台TOMLAB[65],其中包含PROPT等一系列强大的最优控制算法包.
2.3.2 典型软件
(1)ASTOS
ASTOS是一款商业化非常成功的航天器轨迹优化软件,广泛应用于航天任务不同领域和不同类型航天器. 其主要功能和特点包括:①多套成熟轨迹优化算法包.ASTOS提供了多个成熟轨迹优化算法包可供选择,包括两个直接配点法TROPIC和 SOCS、一个多重打靶法 PROMIS和混合打靶/配点法 CAMTOS,以及基于遗传算法优化程序包 CGA,核心算法库多是采用 Fortran语言开发.②功能强大的航天器模型库.包括航天器部件、动力学方程、气动和推进系统特性数学模型,涵盖了欧洲航天机构所拥有运载火箭以及几个非欧洲本土的运载火箭和再入飞行器.采用Ada95开发,共计100个程序包,约50000行代码.③友好的用户界面和接口支持.ASTOS拥有非常好用的界面,软件还提供应用场景模块、任务分析模块、模型数据库模块和面向MATLAB/Simulink的接口和工具箱.④丰富的多样化的功能.ASTOT不仅支持上升、再入和轨道转移等轨迹优化,还支持航天器多学科设计、运营任务分析等,可满足一个航天任务全寿命周期内不同阶段的应用需求.因此ASTOS不仅局限于轨迹优化,同时具备了航天任务分析、性能优化与系统仿真等综合性能.
(2)DIDO
DIDO软件[66]是新近得到广泛推广的商业化轨迹优化软件,其主要功能和特点是:①是一款MATLAB优化程序包,软件采用了面向对象编程框架、直接提供源程序,在MATLAB主界面下调用.由于MATLAB的广泛应用性,其潜在用户群大、应用领域广.②算法较稳定,使用简单.轨迹方法是伪谱法,非线性规划求解器是SNOPT,均是当前最新算法,可用来求解连续推力和脉冲推力轨迹优化问题,算法收敛较稳定.不需用户提供初始估计即可计算出结果,而且不需要用户了解算法的具体原理,并提供解最优性必要条件的验证.③计算效率较高,具有潜在的在线应用能力.
2.3.3 评述
商业软件一般具有良好的用户交互体验,功能集成度高,鲁棒性好,很多产品无需用户提供初始估计值或了解其内部算法便可直接给出很好的优化结果.然而,目前成熟的商业软件基本都是美国或欧洲的公司运营,我国较难获得软件授权.
3 国内航天动力学软件发展概述
国内在航天动力学软件方面起步较晚,开展航天动力学软件研制的部门主要集中在航天领域高校以及相关科研单位.这些工作可分为三类:解决特殊问题的工程软件,具备一定通用性的软件,基于商业软件二次开发的软件.
在解决特殊问题的工程软件方面,其发展大都密切结合国家工程任务需求.1999年,北京航空航天大学肖业伦团队研发了一款星座动力学系统仿真软件[67],应用于星座燃料消耗和地面覆盖情况分析.2003年,清华大学李俊峰团队利用可视交互技术研发了小卫星轨道姿态控制软件[68].2005年,中国空间技术研究院研制了空间碎片防护设计软件包MODAOST[69],用于空间碎片失效概率的研究.2006年,国防科技大学汤国建团队研发了五棱锥SGCMG航天器姿态动力学与控制仿真软件[70].2007年,北京航空航天大学赵育善团队研发了基于 HLA的航天任务仿真系统[71].2004年以来,国防科技大学唐国金团队围绕我国载人航天工程交会对接任务需求,研制了交会对接任务规划软件和全任务实时仿真系统[39,7273],在我国载人航天历次交会对接任务中得到了成功应用.北京航天飞行控制中心研制了深空探测精密定轨与分析软件BODAS[74].
解决特殊问题的工程软件针对具体问题应用情况良好,但是难以通用于其他航天任务.同时也应看到,在大量工程任务的带动和牵引下,我国已经具备了一定的通用航天任务仿真分析与轨迹优化软件开发的技术积累.
在具备一定通用性的软件方面,借助于早期工作的累积与整合,国内已经形成了一批具有一定通用性的航天动力学计算程序和仿真平台.西北工业大学唐硕团队基于分布式仿真原理研发的动力学仿真软件Sky fl y[7576],能够适用于以导弹为应用背景的多种任务.哈尔滨工业大学崔乃刚团队研发整合了具有较好通用性的攻防对抗动力学软件[77].国防科技大学王华等[78]开发了航天系统分析与仿真程序库AstroLib,该程序库与STK/PL模块类似,具备时间系统、坐标系统、轨道参数转换、高精度轨道外推等模块,并进一步研发了通用飞行任务分布式仿真集成管理平台软件[79].中国科学院空间科学与应用研究中心郑建华团队研发了适应性较广的深空引力辅助飞行方案设计软件[80].航天慧海公司研发了VppSTK卫星仿真分析软件[81],与STK类似,具备卫星仿真分析、任务规划、过境分析与空间态势显示等多种功能.
具备一定通用性的软件对我国航天动力学软件发展起到了探索作用,但是在核心算法性能、通用性、友好性等方面与国外软件有较大差距.这种差距造成国内很多研究工作消耗在重复编写类似功能的代码上,或读旧代码与代码维护上,制约了研究工作的水平提升.
在基于商业软件二次开发的软件方面,亦有大量工作.包括利用基于 VEGA,OpenGL等的航天动力学可视化仿真软件研制工作[8283],利用STK,MATLAB/Simulink等开展的小卫星动力学与控制分析[84]、飞行器控制系统设计[85]、航天任务方案分析仿真[86-87].
基于商业软件二次开发可以快速实现航天动力学软件产品,但难以掌握核心技术且极易受到商业软件开放程度的制约,终非长久之计.
4 总结与思考
4.1 国际上航天动力学软件的发展总结
国际上典型航天动力学软件对比如表1所示,总结起来有如下几点启示.
(1)以美国为首的航天强国形成了内部软件、开源软件和商业软件相结合的完善航天动力学软件系列
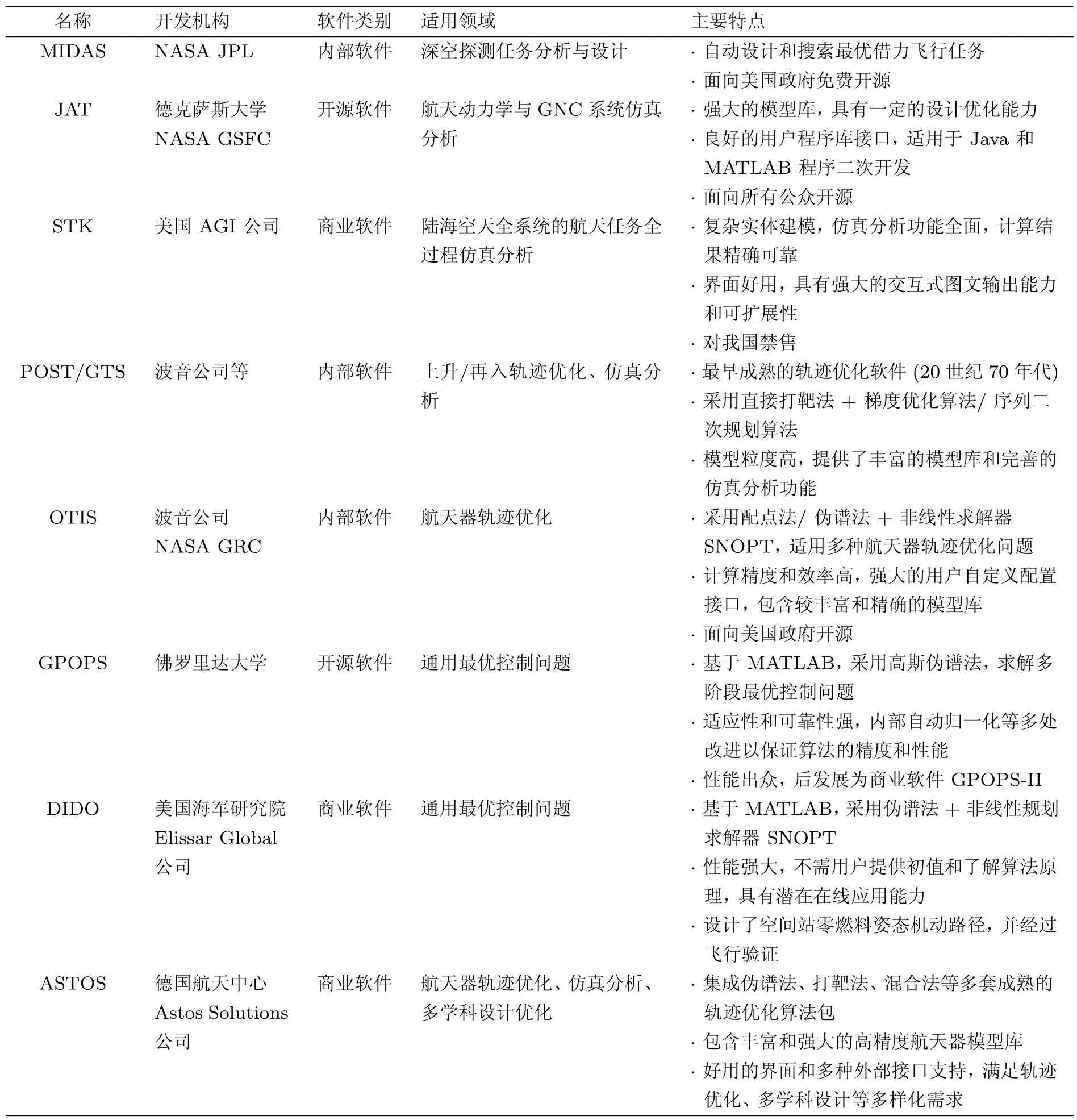
表1 国际典型航天动力学软件分析对比
最初的航天动力学软件大都来源于内部软件,一般由 NASA等航天机构与有实力的高校或商业公司合作,采用高校或商业公司优秀的航天动力学相关算法,结合航天机构积累的大量精确模型库形成,如MIDAS、OTIS等.这些内部软件是国家航天技术竞争力的核心部分.同时,利用开源机制也逐渐发展成熟了一些优秀开源软件,如ACADO Toolkit和GPOPS.另一方面,NASA等航天机构也会适当开源一些原有的内部软件,以促进航天技术的民用转移和商业航天的发展.随着核心算法技术不断成熟,再结合软件产品化运作,进一步推出了功能强大的商业软件,如 STK,DIDO,ASTOS等.不少航天动力学软件商业公司,不仅负责软件的开发维护,还可为用户提供一站式解决方案.商业软件本身就是商业航天发展的一部分,而且促进和支持了航天工程任务的发展.
(2)成熟的动力学模型与算法是航天动力学软件的核心
成熟的航天动力学模型和求解算法是形成航天动力学软件的核心和基础. 航天任务仿真分析软件应当具备正确稳定普适的航天动力学问题分析算法,如坐标和时间系统转化、轨道动力学、姿态动力学、制导控制分析等系列算法,这些算法看似是航天动力学领域的一般性算法,但也历经多年的发展,正确性得到逐步验证,算法稳定性不断提升,普适性强,形成了核心竞争力.航天器轨迹优化软件发展历程则更明显体现出了算法的核心地位,ASTOS,SOCS,DIDO等软件研制者均是相关算法的提出者,这些算法均代表了当时航天器轨迹优化领域的最高研究水平.
(3)多样化功能与丰富的模型库是航天器动力学软件推广应用的关键
STK,OTIS,ASTOS等航天动力学软件广泛应用的一个重要原因其多样化的功能和丰富的模型库.STK的成功不仅得益于其成熟的航天动力学算法、强大可视化与交互能力,更得益于其丰富和精确的高度可定制模型库,以及面向航天任务全寿命周期的多样化仿真分析能力.OTIS和ASTOS拥有大量成熟的航天器模型库,可完成动力学模型复杂、粒度要求高的上升/再入轨迹优化,也支持偏差仿真和航天器多学科设计优化等.此外,这些软件的一大发展趋势是仿真分析与设计优化能力的高度融合,仿真分析软件也逐步发展了迭代优化功能,轨迹优化软件同时具备了丰富的仿真分析功能.
4.2 对发展我国自主航天动力学软件的思考
国外的实践表明,功能丰富、高效精确、任务通用、界面好用的航天动力学软件,能有力促进航天动力学工程关键技术的进步和积累,提高航天任务分析与设计的水平和效率,推动航天技术的标准化、商业化、自主化发展.我国尚无成熟的通用航天动力学软件,近年来我国航天动力学研究在国家一系列重大任务的带动下,取得了长足发展,具备了研制自主软件的基础.面对航天事业蓬勃发展的大好机遇以及国际技术壁垒带来的严峻挑战,我国有能力,并且亟需开展自主航天动力学软件的研制工作.
(1)我国航天动力学软件的功能定位
结合我国航天发展的现状与未来规划,我国自主航天动力学软件应涵盖近地卫星应用、载人航天和深空探测三个主要领域.结合国外软件的发展经验,软件应兼顾仿真分析与轨迹优化两个方面的核心能力.考虑到STK在仿真分析领域的压倒性优势和国外众多仿真分析开源软件的冲击,软件首先应该以轨迹优化为突破口,着力发展脉冲轨道优化、小推力轨道优化方面的核心算法竞争力.进一步基于开放式构架,逐渐丰富完善模型库、开发友好接口与界面,并利用实际任务对软件进行验证.
(2)围绕自主软件研发需求,进一步发展成熟的核心算法
成熟稳定的航天动力学算法是发展自主航天动力学软件的核心,也是国外对我国实施技术封锁的主要对象.涉及到时间和坐标系统转换、精确的航天动力学模型及预报、轨道寿命分析、覆盖分析、光照分析、碰撞分析等航天任务仿真分析算法,以及连续推力最优控制、脉冲机动规划、非线性规划求解器等轨迹优化算法.这些算法国内航天动力学研究领域均有相当好的积累,例如在轨迹优化方法方面,清华大学、中科院等团队发展了性能优良的连续推力优化同伦法和混合法[8889].但这些算法研究多侧重于理论层面,在算法收敛可靠性、适用问题的通用性、算法性能测试、算法代码质量、可扩展性等多方面离成熟稳定还有一定的差距.后续研究,要以发展成熟稳定的核心算法、形成软件产品为目标和导向,要在提高算法的适用性、鲁棒性和容错性等方面下功夫,进而形成核心竞争力.
(3)创新软件开发和应用推广机制
成熟的软件离不开持续地测试、应用、推广和完善.借鉴国外的发展经验,结合我国具体国情,探索一条合适的自主航天动力学软件开发和推广途径.
建立高校、工程部门和商业公司有机合作开发模式.依托高校研究力量攻克航天动力学核心模型算法,依托工程部门研发模型库、结合实际任务验证,依托商业公司进行软件架构设计和前后处理开发.三者联合,通过申请国家自然科学基金计算力学软件[90]等项目带动,推动研制工作稳步开展.
适度的开源模式.借鉴国外航天动力学开源软件的发展模式,将适合的代码发布于合适的开源平台,进行软件推广和完善提高,同时带动国内航天动力学整体研究水平的进步.
注重多渠道的推广和应用.借助全国空间轨道设计竞赛[91]、全国研究生未来飞行器创新大赛等需要一定专业基础的竞赛平台推广开源软件,促进算法完善,增加在专业领域的知名度.推广较为成熟的正式发布版本与工程部门实际任务相结合,在实际任务的应用中验证软件的有效性、不足和实际需求.此外,还可推出教育版,与高校的学生培养过程相结合.
1 Wertz JR,Everett DF,Puschell JJ.Space Mission Engineering:The New SMAD.Portlan:Microcosm Press,2011
2周建平.空间交会对接技术.北京:国防工业出版社,2013
3唐国金,张进,罗亚中.空间交会对接任务规划.北京:科学出版社,2008
4李恒年.地球静止卫星轨道与共位控制技术.北京:国防工业出版社,2010
5张育林,范丽,张艳等.卫星星座理论与设计.北京:科学出版社,2008
6李俊峰,宝音贺西,蒋方华.深空探测动力学与控制.北京:清华大学出版社,2014
7崔平远,乔栋,崔祐涛.深空探测轨道设计与优化.北京:科学出版社,2013
8 Meeus JH.Astronomical Algorithms.Richmond:Willmann-Bell,Incorporated,1991
9 AstroLib Homepage,2017-04-20,http://mhuss.com/Astro Lib/
10 Project Homepage,2017-04-20,http://archive.stsci.edu/
11 SOFA Homepage,2017-04-20,http://www.iausofa.org/
12 Longuski JM.User’s Guide Satellite Tour Design Program.Pasadena:Jet Propulsion Laboratory,1983
13 Longuski JM,Williams SN.Automated design of gravityassist trajectories to Mars and outer planets.Celestial Mechanics and Dynamical Astronomy,1991,52(3):207-220
14 Moonish RP,Longuski JM.Automated design of delta-V gravity-assist trajectories for solar system exploration.The AAS/AIAA Astrodynamics Conference,Victoria,BC,AAS Paper 93-682,1993
15 Win Orbit Homepage,2017-04-20,http://www.sat-net.com/winorbit
16 Savi Homepage,2017-04-20,http://sourceforge.net/projects/savi
17 Orbiter Homepage,2017-04-20,http://orbit.medphys.ucl.ac.uk/index.html
18 Schweiger M.Orbiter:a free spacecraft simulation tool.2nd ESA Workshop on Astrodynamics Tools and Techniques,ESTEC,Noordwijk,2004
19 ORSA Homepage,2017-04-20,http://orsa.sourceforge.net/20 Tricarico P.ORSA:orbit reconstruction,simulation and analysis. Workshop on Computational Astrophysics in Italy:Methods and Tools,Bologna,Italy,2002
21 Turner AJ.An open-source,extensible spacecraft simulation and modeling environment framework.Virginia Polytechnic Institute and State University,2003
22 Turner AJ.The development and use of open-source spacecraft simulation and control software for education and research.IEEE 2006 2nd International Conference on Space Mission Challenges for Information Technology,SMC-IT 2006
23 Ortega G,Laurel C,Erb S,et al.STA,the space trajectory analysis project.4th International Conference on Astrodynamics Tools and Techniques,2010
24 NASA Software 2017-2018 Catalog,https://software.nasa.gov/NASA-Software-Catalog-2017-18.pdf
25 GSFC Open Source Software,2017-04-20,https://opensource.gsfc.nasa.gov/
26 JAT Homepage,2017-04-20,http://jat.sourceforge.net/
27 Gaylor D.Java astrodynamics toolkit.AAS Guidance and Control Conference,Breckenridge,CO,AAS 05-030,2005
28 Gaylor D,Page R,Bradley K.Testing of the Java Astrodynamics Toolkit propagator.AIAA/AAS Astrodynamics Specialist Conference and Exhibit,Keystone,Colorado,2006
29 GMAT Homepage,2017-04-20,http://gmatcentral.org/
30 Laing J,Abedin M.Introduction to the GMAT software.6th International Conference on Astrodynamics Tools&Techniques,Darmstadt, Germany,2016
31 EMTG Homepage,2017-04-20,https://sourceforge.net/proj ects/emtg/
32 AGI Homepage,2017-04-20,http://www.agi.com/
33丁溯泉,张波,刘世勇.STK在航天任务仿真分析中的应用.北京:国防工业出版社,2011
34 FreeFlyer Homepage,2017-04-20,https://ai-solutions.com/free fl yer/free fl yer/
35 SC Modeler Homepage,2017-04-20,https://www.avmdy namics.com/index1.htm
36 PSS/SCT Homepage,2017-04-20,http://www.psatellite.com/products/sct/
37杨宏伟,赵文津,吴珍汉.GEODYN-Ⅱ软件移植和40阶次月球重力场的解算.地质通报,2011,30(11):1727-1737
38 Putney BH,Felsentreger TL.GEODYN systems development.NASA Technical Memorandum,NASA TM-87801,1987
39唐国金,罗亚中,雍恩米.航天器轨迹优化理论、方法及应用.北京:科学出版社,2012
40 Brauer GL,Cornick DE,Stevenson R.Capabilities and applications of the program to optimize simulated trajectories(POST).NASA CR-2770,1977
41 Meder DS,Searcy JL.Generalized trajectory simulation(GTS),volumes I-V.The Aerospace Corp,TR SAMSOTR-75-255,El Segundo,CA,1975
42 Dankanich J.Low-thrust mission design and application.46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference&Exhibit,AIAA 2010-6857,2010
43 Vlases WG,Paris SW,Lajoie RM,et al.Optimal trajectories by implicit simulation.Boeing Aerospace and Electronics,TR WRDC-TR-90-3056,Wright–Patterson AFB,OH,1990
44 Betts JT,Huffman WP.Sparse optimal control software:SOCS.Mathematics and Engineering Analysis Library,MEA-LR-085,Boeing Information and Support Services,Seattle,WA,1997
45 Kos LD,Polsgrovet T,Hopkins RC,et al.Overview of the development for a suite of low-thrust trajectory analysis tools.AAS 2006 Conference Paper,2006
46 Oberle HJ,Grimm W.BNDSCO–a program for the numerical solution of optimal control problems,user guide.DLR IB/515-89/22,Oberpfaffenhofen,Germany,1989
47 Von Stryk O.User’s guide for DIRCOL 2.1:a direct collocation method for the numerical solution of optimal control problems.Technical Univ of Darmstadt,Germany,1999
48 Berend N,Talbot C.Overview of some optimal control methods adapted to expendable and reusable launch vehi-cle trajectories.Aerospace Science and Technology,2006,10(2):222-232
49 Gill PE,Murray W,Saunders MA.SNOPT:an SQP algorithm for large-scale constrained optimization.SIAM Review,2005,47:99-131
50 Becerra VM.Solving complex optimal control problems at no cost with PSOPT.2010 IEEE International Symposium on Computer-Aided Control System Design,2010
51 Rao AV,Benson DA,Darby C,et al.Algorithm 902:GPOPS,a MATLAB software for solving multiple-phase optimal control problems using the gauss pseudospectral method.ACM Transactions on Mathematical Software,2010,37:1-39
53 Falugi P,Kerrigan E,Van Wyk E.Imperial college London optimal control software user guide(ICLOCS).Department of Electrical and Electronic Engineering,Imperial College London,London,England,UK,2010
54 Houska B,Ferreau HJ,Diehl M.ACADO toolkit–an opensource framework for automatic control and dynamic optimization.Optimal Control Applications and Methods,2011,32:298-312
55 Åkesson J, Årzén K-E,Gäfvert M,et al.Modeling and optimization with Optimica and JModelica.org–languages and tools for solving large-scale dynamic optimization problems.Computers&Chemical Engineering,2010,34:1737-1749
56 ASTOS Homepage,2017-04-20,https://www.astos.de/
57 Well KH,Markl A,Mehlem K.ALTOS–a software package for simulation and optimization of trajectories of launch and reentry vehicles.The 48th International Astronautical Congress,Turin,IAF-97-V4.04,1997
58 Well KH.Graphical environment for simulation and optimization.Dept of Optimization,Guidance,and Control,Stuttgart,Germany
59 Betts JT.Practical methods for optimal control using nonlinear programming. Advances in Control and Design Series,Society for Industrial and Applied Mathematics,Philadelphia,2001
60 Fahroo F,Ross IM.User’s manual for DIDO 2002:a MATLAB application package for dynamic optimization.NPSAA-02-002,2002
61 Ross IM,Mark K.A review of pseudospectral optimal control:from theory to flight.Annual Reviews in Control,2012,36(2):182-197
62 GPOPS-II Homepage,2017-04-20,http://www.gpops2.com/
63 QuickShot Homepage,2017-04-20,http://spaceworkssoft ware.com/quickshot/
64 Space Flight Solutions Homepage,2017-04-20,http://space flight solutions.com/
65 TOMLAB Homepage,2017-04-20,http://tomopt.com/tomlab/
66 DIDO Homepage,2017-04-20,http://www.elissarglobal.com/industry/products/software-3/
67向开恒,肖业伦.卫星星座的系统仿真研究.北京航空航天大学学报,1999,25(6):629-633
68徐晓云,李俊峰,苏罗鹏等.小卫星轨道姿态控制系统仿真软件平台.清华大学学报(自然科学版),2003,43(2):234-237
69郑世贵,韩增尧,闫军等.空间碎片失效概率分析软件标准校验及初步应用.航天器工程,2005,14(2):66-74
70孟庆达,汤国建.航天器姿态动力学与控制的面向对象仿真框架.飞行力学与飞行试验学术交流年会,2006
71夏丰领,赵育善.基于HLA的航天任务仿真系统.系统仿真学报,2007,19(24):5710-5714
72 Luo YZ,Zhang J,Li HY,et al.Space rendezvous and docking mission planning system using object-oriented method.AIAA Modeling and Simulation Technologies Conference,AIAA Paper 2010-8104,2010
73王华,尤岳,林西强等.空间交会对接任务仿真系统架构设计与实现.载人航天,2013,19(3):46-51
74胡松杰,唐歌实.北京中心深空探测器精密定轨与分析软件系统.飞行器测控学报,2010,29(5):69-74
75王晓东,唐硕.分布式实时飞行仿真中的关联技术.飞行力学,2005,23(3):94-96
76吴魁,张巍,路长刚.运载火箭总体设计仿真及评估方案研究.计算机仿真,2010,27(7):25-27
77郭继峰,殷志宏,崔乃刚.基于仿真的空地导弹武器体系作战效能评估决策方法.控制与决策,2009,24(10):1576-1579
78王华,唐国金,李海阳.航天系统分析与仿真基础程序库 AstroLib.系统仿真学报,2007,19(13):2917-2923
79孙福煜,王华,周晚萌.载人交会对接任务分布式仿真集成管理平台研究.系统仿真学报,2014,26(10):2330-2334
80李志武,郑建华,于锡峥等.深空探测行星借力飞行轨道自动设计与仿真.计算机仿真,2009,26(6):59-61
81航天慧海公司主页,2017-07-02,http://www.vvp.cc/
82徐文明,徐瑞,崔平远等.可视化分布式自主深空探测器系统仿真.系统仿真学报,2006,18(6):1497-1500
83陈宏敏,战守义,刘涛等.“嫦娥一号”任务全球地形实时仿真技术研究.系统仿真学报,2009,21(19):6136-6139
84何威,张世杰,曹喜滨.基于软件接口的卫星多领域建模与仿真研究.系统仿真学报,2011,23(1):7-12
85杨庶,王长青,王伟等.基于 MATLAB的飞行控制系统辅助设计软件的开发.测控技术,2012,31(2):96-98
86张占月,徐艳丽,曾国强.基于STK的航天任务仿真方案分析.装备指挥技术学院学报,2006,17(1):48-51
87丁溯泉.STK使用技巧及载人航天工程应用.北京:国防工业出版社,2016
88李俊峰,蒋方华.连续小推力航天器的深空探测轨道优化方法综述.力学与实践,2011,33(3):1-6
89高扬.电火箭星际航行:技术进展、轨道设计与综合优化.力学学报,2011,43(6):991-1019
90宁建国,马天宝,詹世革等.计算力学自主软件基金资助情况通报及研讨会.力学学报,2013,45(1):144-148
91曹静,沈红新,李恒年.多星编队构型重构全局优化策略––第七届全国空间轨道设计竞赛乙题解法.力学与实践,2016,38(6):697-704
SURVEY OF ASTRODYNAMICS SOFTWARE DEVELOPMENT1)
LUO Yazhong∗,2)SUN Zhenjiang∗QIAO Dong†
∗(College of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China)
†(School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
The astrodynamics software is a bridge between the astrodynamics theory and the engineering application,which can evidently improve the efficiency and the ability of the space mission design and analysis.There are many mature software systems in the world,but many of them are not available in our country.In recent years,great progress has been made in the field of the national astrodynamics research and the engineering applications,but the mature astrodynamics software remains almost a blank area.The development of the international astrodynamics software is surveyed and sorted into two kinds:the space mission analysis and the spacecraft trajectory optimization.The representative open-source and commercial software systems are introduced,including JAT,STK,Free flyer,POST and ASTOS.Additionally,the development of the Chinese astrodynamics software is also reviewed.At last,the technical characteristics of different astrodynamics softwares are summarized,and preliminary suggestions for the development of a mature astrodynamics software in China are given.
astrodynamics,software system,mission analysis,trajectory optimization
2017–07–17收到第1稿,2017–08–21 收到修改稿.
1)国家自然科学基金(11572345)和国家973计划(2013CB733100)资助项目.
2)罗亚中,教授,主要从事航天动力学与任务规划.E-mail:luoyz@nudt.edu.cn
罗亚中,孙振江,乔栋.航天动力学软件发展评述.力学与实践,2017,39(6):549-560
Luo Yazhong,Sun Zhenjiang,Qiao Dong.Survey of astrodynamics software development.Mechanics in Engineering,2017,39(6):549-560
V11
A
10.6052/1000-0879-17-248
(责任编辑:周冬冬)
猜你喜欢
国际太空(2022年7期)2022-08-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
国际太空(2019年9期)2019-10-23
创新作文(1-2年级)(2019年3期)2019-09-03
软件和集成电路(2019年7期)2019-08-30
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09