1 520 MW核电汽轮机甩负荷动态特性研究
2018-01-05 03:06:20闵渊张亚平金旭明张运德
东方汽轮机 2017年4期
闵渊,张亚平,金旭明,张运德
(东方电气自动控制工程有限公司,四川 德阳,618000)
1 520 MW核电汽轮机甩负荷动态特性研究
闵渊,张亚平,金旭明,张运德
(东方电气自动控制工程有限公司,四川 德阳,618000)
文章为了构建机组甩负荷工况仿真模型、研究机组的动态特性,以HD1520A核电为研究对象,分析了汽轮机系统的特点,按照复杂系统层次化建模的思想,利用Matlab/Simulink仿真工具构建了汽轮机系统仿真模型,重点建立了该对象中各环节(进汽阀门、蒸汽容积、中间再热器和转子等)的数学模型,并在Matlab环境下仿真研究各系统甩负荷工况下运行参数的变化规律,完善控制系统设计方法,为核电机组安全运行提供理论指导。
汽轮机系统,1 520 MW,数学模型,动态特性,仿真研究,控制系统,安全运行
0 引言
论文旨在利用Matlab/Simulink仿真工具,建立汽轮机系统的仿真模型。在此模型的基础上研究各系统的甩负荷工况下的运行参数的变化规律,研究完善控制系统设计方法,为国产化大型核电机组的安全运行提供理论指导。
CAP1400型压水堆核电机组是我国在引进消化第三代先进核电AP1000技术的基础上,通过再创新开发出国际先进非能动大型压水堆核电机组,且核心技术具备完全自主知识产权。其中常规岛汽轮机采用冲动式三缸六排汽设计,单机容量1 520 MW。
Matlab是由美国Math-Works公司开发并推向市场的,历经十几年的发展,现已获得国际上各个相关行业的认可。Simulink工具包是Matlab软件下供使用者建立动态系统模型并仿真软件包,Simulink工具包支持连续时间系统,只需通过简单的调用预制模块并填入参数就可完成建模过程。
1 建立汽轮机系统数学模型
汽轮机系统作为研究对象,其主要分为6个部分:进汽调节阀门 (电/液转换器及油动机)、汽轮机高压缸、中间汽水分离再热器、汽轮机中压缸、汽轮机低压缸和汽轮机转子,如图1所示。

图1 汽轮机被控对象方框图
图1中:
开度指令经过进汽阀门 (电/液转换器、高压油动机)转换为进入汽轮机的蒸汽流量,蒸汽经过蒸汽容积转换为作用于汽轮机转子的旋转扭矩,并带动发电机发电。
NH为高压缸功率;NI为中/低压缸功率;NL为汽轮机功率;N为汽轮机负荷 (发电机有功功率);n为汽轮机转子转速。
核电CAP1400机组转速飞升计算相关数据见表1。

表1 核电CAP1400机组转速飞升计算相关数据表
1.1 蒸汽容积方程
设容器中气体的压力为p,阀门1前气体压力为p1,阀门2后气体压力为p2,当p1和p2均为常值时,流经阀门1和阀门2的流量将是容积中压力p和阀门开度s的函数,即:
经拉氏变换,蒸汽容积的传递函数为:

式(1)中,Tρ为蒸汽容积时间常数。
1.2 中间再热器方程
将中间再热器看成一个集中容积,即认为其内的压力是处处相等的,则它和喷嘴室容积是非常相似的,只是控制它的进汽量是喷嘴室中的压力,而不是高压调节阀的开度,以压力的相对量为输出信号的中间再热器传递函数为:

Th为再热器容积时间常数。
1.3 汽轮机转子方程
决定汽轮机转子运动的因素有3个:(1)汽轮机的蒸汽转矩 MT;(2)负载反转矩 ML;(3)摩擦转矩Mf,不平衡转矩使转子产生角加(减)速度。由于Mf远远小于MT和ML,可以将其忽略,所以转子的力平衡方程见式(3):

式(3)中,J为转子转动惯量;ω为转子角速度。
对该方程进行拉氏变换,则得到汽轮机转子的传递函数为:

Ta一般取6~15 s,Ta和汽轮机组的功率呈负相关。在汽轮机组单机运行工况下,转子自平衡可以忽略,汽轮机转子可简化为一个纯积分环节,汽轮机转子数学模型可表示为:

机组在并网开关合闸运行时,转子转速和电网的频率保持一致,转子特性可以简化为一个典型的一阶惯性环节,转子数学模型可表示为:

传递函数式 (6)中参数B为考虑电网频率变化时负荷的自平衡能力和电网中各并列机组调节系统对电网频率影响的系数。
综上所述,在汽轮机并网工况下建立的汽轮机转子传递函数框图如图2所示,参数NT、N和n分别表示汽轮机功率、汽轮机负荷和汽轮机转子转速。

图2 汽轮机转子传递函数框图
2 汽轮机数字电液控制系统仿真
2.1 数字电液调节系统 (DEH)简介
将模拟电信号转换为数字电信号,实现综合与放大,再将电信号转换为液压信号,以控制汽轮机运行的调节保安系统。
早期的DEH多以小型机为核心组成,以微机为基础的分散控制系统出现后,汽轮机DEH系统逐步转向由分散控制系统组成[1]。
2.2 汽轮机负荷控制系统仿真
2.2.1 汽轮机负荷控制原理
汽轮机DEH控制系统采用的负荷控制方框图如图3所示。

图3 汽轮机DEH控制系统的负荷控制方框图
系统由3个回路串级组成:由内到外分别为压力控制调节回路、负荷控制调节回路、转速控制调节回路 (在并网工况下可理解为调频回路)。汽轮机一级进汽压力和汽轮机机组功率呈一定的正向线性关系,由此可将压力控制调节回路和功率控制调节回路采用一样的控制策略,即控制器反馈的是机组的压力或功率,它们与外部转速控制调节回路一起共同组成了汽轮机组的控制调节系统[2]。
在汽轮机组没有并网运行时,汽轮机控制系统的压力及负荷控制调节回路未投入,系统只有转速控制调节回路。控制系统转速控制调节器为一个比例积分环节。将汽轮机的给定转速和实际测量转速的偏差信号进入转速控制器,通过转速控制器的比例积分环节计算之后,得到了机组阀门的调节信号,该信号通过执行器 (液压油动机)调节整个汽轮机组的蒸汽进汽量,从而实现对汽轮机转速的控制。
功率控制器、压力控制器由控制系统内部通过对相关的信号进行处理后决定负荷回路、压力回路是否投入。
机组在并网工况下运行,负荷控制策略为典型PID控制。系统中的外扰是负荷扰动信号,对机组实发功率进行调整,以保证电网的供电与用电的平衡,转速反馈信号用于调节转速反馈等于给定值。转速控制器为P控制器,功率控制器和调节级压力控制器均为PI控制器。功率给定用于增减功率,系统稳定后,机组实际增加的功率与给定的目标功率存在一个比例关系,比例系数为转速控制器的比例增益[3]。
2.2.2 汽轮机甩负荷模型建立
将汽轮机仿真模型输入至Simulink中,其中汽轮机模型前为转速控制器,在汽机脱网后为PI 调节控制器,具体模型如图4所示。

图4 Simulink仿真环境下汽轮机控制系统方框图
图4中转速设定为0,表示转速控制目标一直稳定在额定转速;功率扰动信号为模拟汽机甩负荷时给汽机系统的一个阶跃信号;系统的输出为高压一级压力输出、转速信号输出、汽轮机功率输出和再热流量输出。
图5表示整个蒸汽在汽轮机内做功流程,蒸汽通过高压阀门进入高压缸内膨胀做功,再经过再热器加热后依次进入中压和低压缸做功。蒸汽所有做功通过汽轮机转子转换为机械能带动发电机发电。

图5 Simulink仿真环境下汽轮机模型
通过前一章节的数据和计算可以得出汽机参 数如表2所示。

表2 核电CAP1400机组时间常数及功率比值
2.2.3 汽轮机甩负荷仿真计算
在汽轮机进汽阀门不接超加速保护信号,即图5中所示超加速保护信号为0,转速不等率0.04,汽轮机甩负荷仿真转速飞升曲线见图6~7。

图6 汽轮机甩厂用电转速飞升-无OPC保护
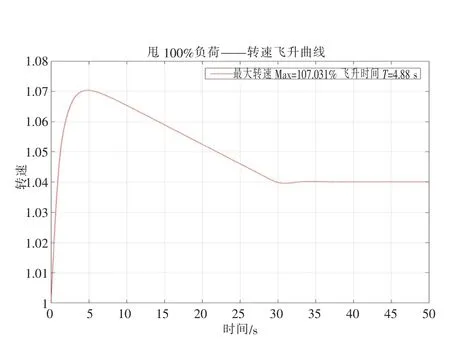
图7 汽轮机甩100%负荷转速飞升-无OPC保护
OPC保护未启用情况下,汽轮机甩负荷转速飞升曲线如图6~7所示,飞升最大转速分别为5.557% (甩厂用电)和 7.031% (甩 100%全负荷)。
在汽轮机进汽阀门接入超加速保护 (即在102%额定转速投入,在转速加速度超设定值触发,阀门设定值为最低,这里设定值根据汽机模型计算得出)信号[4]。即图5中所示,转速不等率0.04,汽轮机甩100%满负荷转速飞升曲线见图8~图11。

图8 汽轮机甩厂用电转速飞升-启用OPC保护

图9 汽轮机甩厂用电-OPC保护调阀快关动作曲线
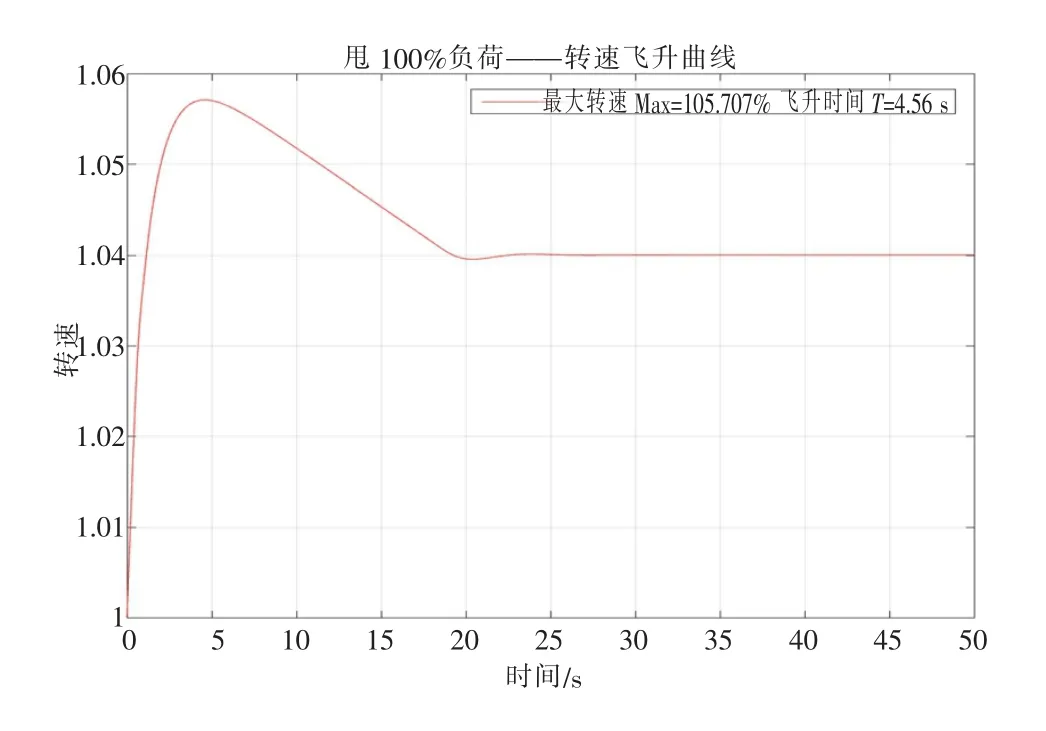
图10 汽轮机甩100%负荷转速飞升-启用OPC保护
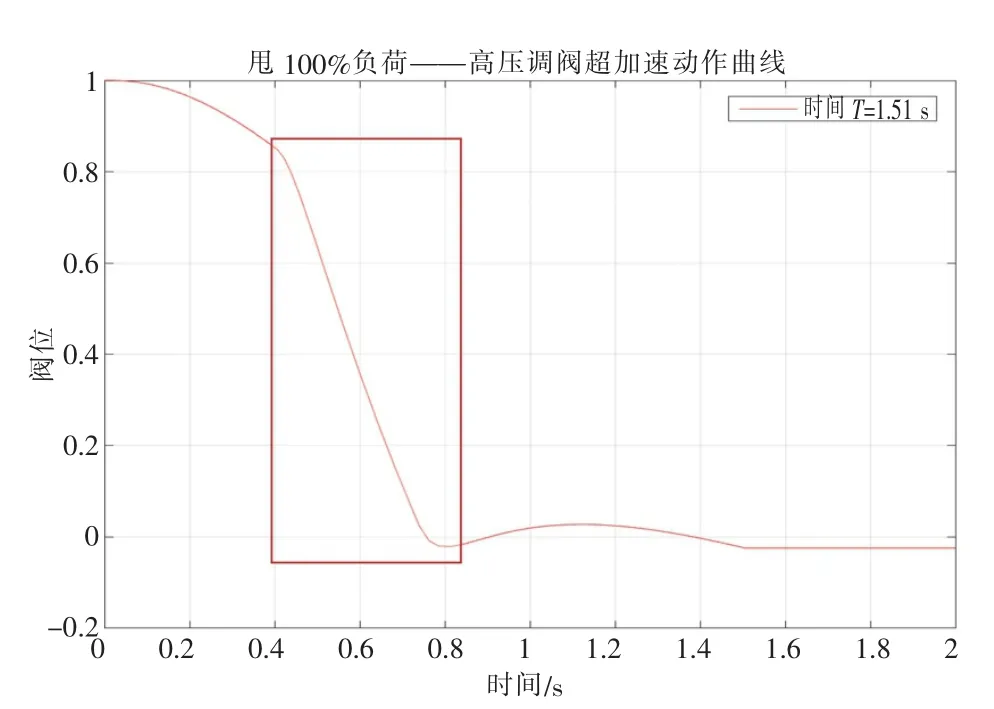
图11 汽轮机甩100%负荷-OPC保护调阀快关动作曲线
OPC保护启用之后,汽轮机甩负荷转速飞升曲线如图8和图10所示,飞升最大转速分别为4.663%(甩厂用电)和5.707% (甩100%全负荷),并且在调节阀门动作曲线图9和图11中可以明显地看出阀门有一个快速关闭的动作。
以上图形中红框所标识部分为超加速动作后,高压调节阀门得到最小指令后迅速关闭曲线。经过仿真对比得出表3的结果。在阀门指令之上叠加超加速指令,调节阀可以更快动作以保证汽轮机飞升转速在更安全的范围内,汽轮机的安全运行在甩负荷工况下得以保证。

表3 DTC核电CAP1400机组转速飞升数据对比
3 结论
根据1 520 MW汽轮机控制要求和液压伺服控制特点,确定了汽轮机控制系统方案,通过建立各环节Simulink仿真模型,对1 520 MW中间再热式汽轮机组并网后的甩负荷工况进行仿真研究,得出了甩负荷工况汽轮机转速的飞升曲线,仿真结果表明该系统动态特性满足核电汽轮机安全运行要求;对比已投运机组运行数据,验证了仿真模型的精度;通过汽轮机仿真模型,调整和整定控制系统的部分参数,可以指导汽轮机重要参数的设计和控制策略的确定;仿真研究提供了验证设计的方法,也为进一步构建电厂全厂的仿真模型奠定了基础。
[1]王爽心,葛晓霞.汽轮机数字电液控制系统[M].北京:中国电力出版社,2004.
[2]降爱琴,郝秀芳.数字电液调节与旁路控制系统[M].北京:中国电力出版社,2005.
[3]孙奎明,时海刚.热工自动化[M].北京:中国电力出版社,2006.
[4]刘宏兵,百万二次再热机组甩负荷动态特性研究[M].成都:四川电力技术出版社,2012.
Study on Dynamic Characteristics of Load Rejection of Nuclear Steam Turbine
Min Yuan, Zhang Yaping, Jin Xuming, Zhang Yunde
(Dongfang Electric Auto-control Engineering Co.,Ltd.,Deyang Sichuan,618000)
In order to establish the simulation model on the load condition and study the dynamic characteristic of unit,the HD1520A type nuclear power steam turbine as the research object,the characteristics of steam turbine system is analyzed.According to the idea of hierarchical modeling of complex system,the steam turbine simulation model is contructed by Matlab/Simulink tools,The mathematical model of each link(the steam inlet valve,steam volume,intermediate reheater and rotor)is estabished,and in Matlab simulate environment,the system operating parameters under load rejection condition are studied,to improve the design method of control system and provide theoretical guidance for the safe operation of nuclear power plant.
steam turbine system,1 520 MW,mathematical model,dynamic characteristic,simulation research,improve control system,safe operation
TP272
A
1674-9987(2017)04-0072-05
10.13808/j.cnki.issn1674-9987.2017.04.016
闵渊 (1988-),男,工程师,2011年7月至今在四川东方电气自动控制工程有限公司工作,现主要从事核电产品设计工作。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
流程工业(2022年3期)2022-06-23 09:41:08
煤气与热力(2021年3期)2021-06-09 06:16:18
汽车维修与保养(2021年8期)2021-02-16 00:28:20
能源工程(2020年5期)2021-01-04 01:29:00
广西电力(2016年4期)2016-07-10 10:23:38
工业设计(2016年4期)2016-05-04 04:00:23
工业设计(2016年4期)2016-05-04 04:00:15
中学科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39