
实时以太网EtherCAT在某大型机动雷达伺服系统中的应用
2018-01-05 08:57汤辉,刘喆
雷达与对抗 2017年4期
汤 辉,刘 喆
(中国电子科技集团公司第三十八研究所 机械传动与控制工程实验室,合肥 230088)
实时以太网EtherCAT在某大型机动雷达伺服系统中的应用
汤 辉,刘 喆
(中国电子科技集团公司第三十八研究所 机械传动与控制工程实验室,合肥 230088)
对EtherCAT总线技术在某大型机动雷达自动架设系统中的应用进行了描述。与传统总线技术相比,列举了EtherCAT的特点及系统需求,并对EtherCAT的环网冗余技术及时钟同步技术进行了分析。着重介绍了该自动架设控制系统的设计方法、功能组成和EtherCAT的组网方法。所讨论的内容和涉及的方法均来源于实际工程系统,对自动架设控制系统工程设计人员具有一定的参考价值。
EtherCAT;冗余环网;时钟同步
0 引 言
目前,地面机动雷达伺服系统普遍采用CAN总线用于数据传输,克服了传统的如RS232、RS485、RS422等串行接口方式传输距离短、速率低、不具备硬件故障诊断功能等缺点,为雷达总线型伺服系统中可靠稳定的数据传输发挥了重要作用。但是,随着大型地面机动雷达的规模不断增大,对伺服系统的点数和数据实时性要求都提出了更高的要求,外部传感器的输出信号数量、种类以及物理布局都具有较大的随机性,伺服驱动以及速度、位置闭环数据采集的实时性更是伺服高性能实现的保证。而CAN总线最高数据率1Mbps、不具备时钟同步和环路冗余的缺陷,以及现场总线的多样性给总线设备的统一性和可维护性带来的困难,导致了CAN总线在雷达伺服系统中应用的局限性。
工业以太网技术已经成为工业控制领域中的一个研究热点,其中EtherCAT(Ethernet for Control Automation Technology)是开放的实时以太网通信协议。它基于标准的以太网技术,支持多种设备连接拓扑结构,具有配置简单、有效数据率高、全双工、数据传输容量大、传输速度快、时钟同步性高、成本低、开放性好等特点,是一种用于工业自动化的实时、高速以太网通信协议。
1 EtherCAT特点及系统总体需求分析
EtherCAT将底层通信协议嵌入硬件中实现,大大减少了操作系统、CPU资源的占用,使得应用软件在现有软硬件平台下发挥最大性能。EtherCAT采用了基于IP组播通信的IEEE1588时间同步机制,其采用的“主时钟”、“从时钟”能够提供信号误差在1 μs内的精确时钟基准。EtherCAT技术信号处理速率非常高,在30 μs内能够完成1 000个I/O节点刷新,一个以太网帧每次最多可以完成1 468个字节的数据传输,而完成这样数据量的传输仅需300 μs。数据传输的实时性和巨大的带宽资源实现了很好的结合,突破了以往实时性网络带宽资源的瓶颈。
某大型机动式雷达自动架设系统复杂,共涉及到150个开关量输入点、70个开关量输出点,以及10路模拟输入信号和4路编码器信号、4路伺服驱动。系统采用EtherCAT作为数据传输总线,其系统架构如图1所示。以嵌入式PC为EtherCAT主站,通信链路中的人机操作设备、伺服设备以及编码器、远程I/O数据采集模块均为EtherCAT从站。该系统不仅对4路伺服驱动的同步控制精度要求较高,对于外部远程各类传感器的信号采集更新率也提出了毫秒级的需求,通过EtherCAT实时以太网链路的运行,完全能够满足系统实时性的要求。

图1 某大型机动式雷达伺服系统EtherCAT总线架构
2 通讯链路可靠性设计
在总线系统中,单点故障会造成系统瘫痪,所以通信链路的冗余设计也越来越受到重视。无论RS422、RS485等串口连接形式,还是CAN通讯,由于其支持的拓扑类型单一,无法实现通信链路的冗余设计,造成控制系统的可靠性无法保证。EK1100是嵌入式PC专门用于组建环网冗余的具有自动环回功能的通讯模块,通过它组建的具有双向环结构的网络,可以使信息流在网中沿固定方向流动时,当环型结构中出现一个节点故障而造成的网路故障时,信息流在断点处自动环回,保证了通讯链路的正常工作。同时上报故障节点信息,以帮助及时在线排除节点故障,其环路连网示意如图2。[1-2]
3 时钟同步设计
双电机同步驱动或多电机同步驱动技术在雷达伺服控制系统中的应用越来越广泛。在本文讨论的雷达系统中,要求伺服控制系统完成12 m×16 m天线的双级双机同步举高驱动,且天线背架刚性较弱。为了保证天线单元及行骨架的位置精度,对双机驱动的同步精度提出了较高的要求(同步误差≤2 mm)。系统采用主从控制模式,形成位置和速度双闭环控制回路,其控制原理如图3所示。为了保证闭环控制系统的响应速度以及对位置误差的采样频率,要求控制器与伺服驱动器之间的通讯速率较高。
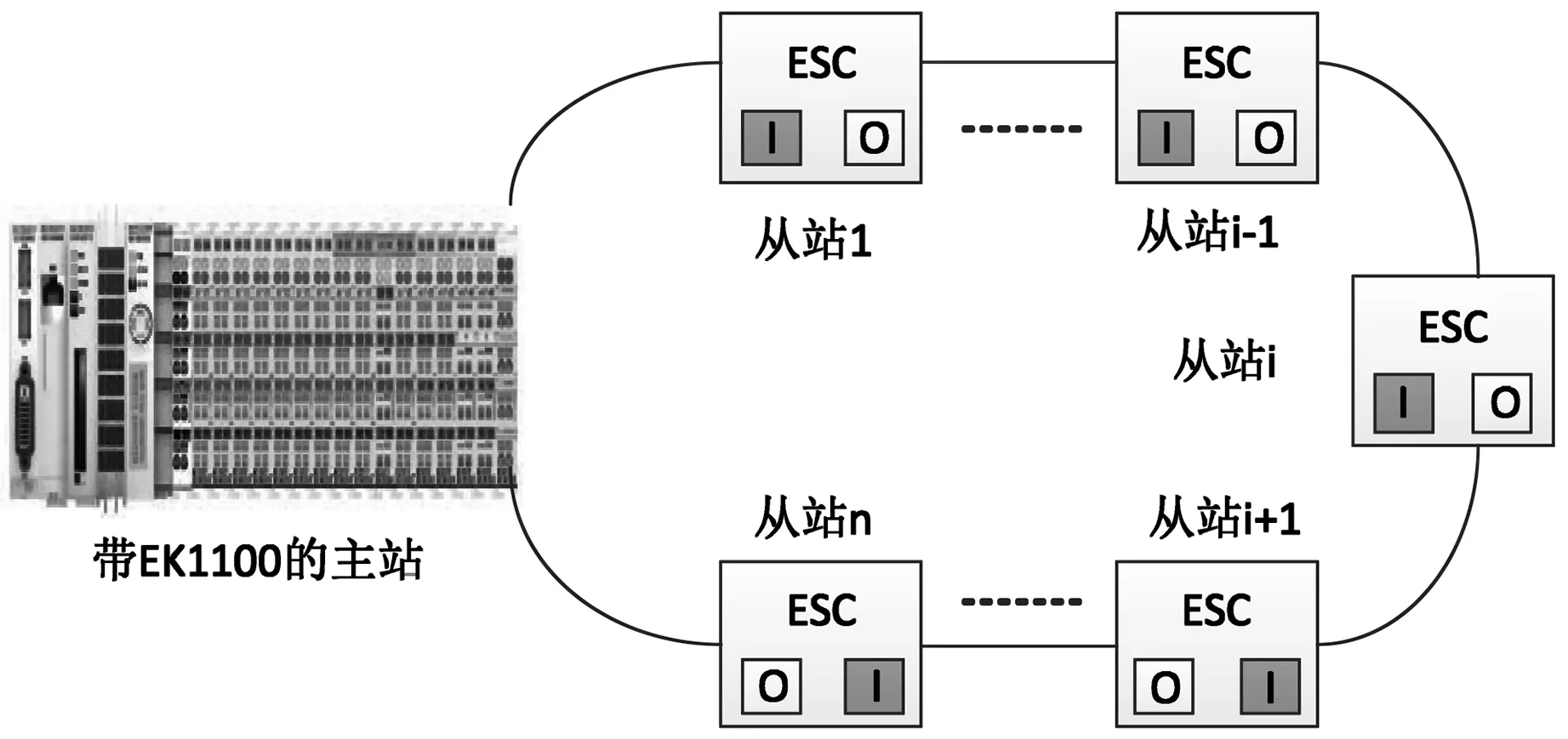
图2 EtherCAT环行冗余结构
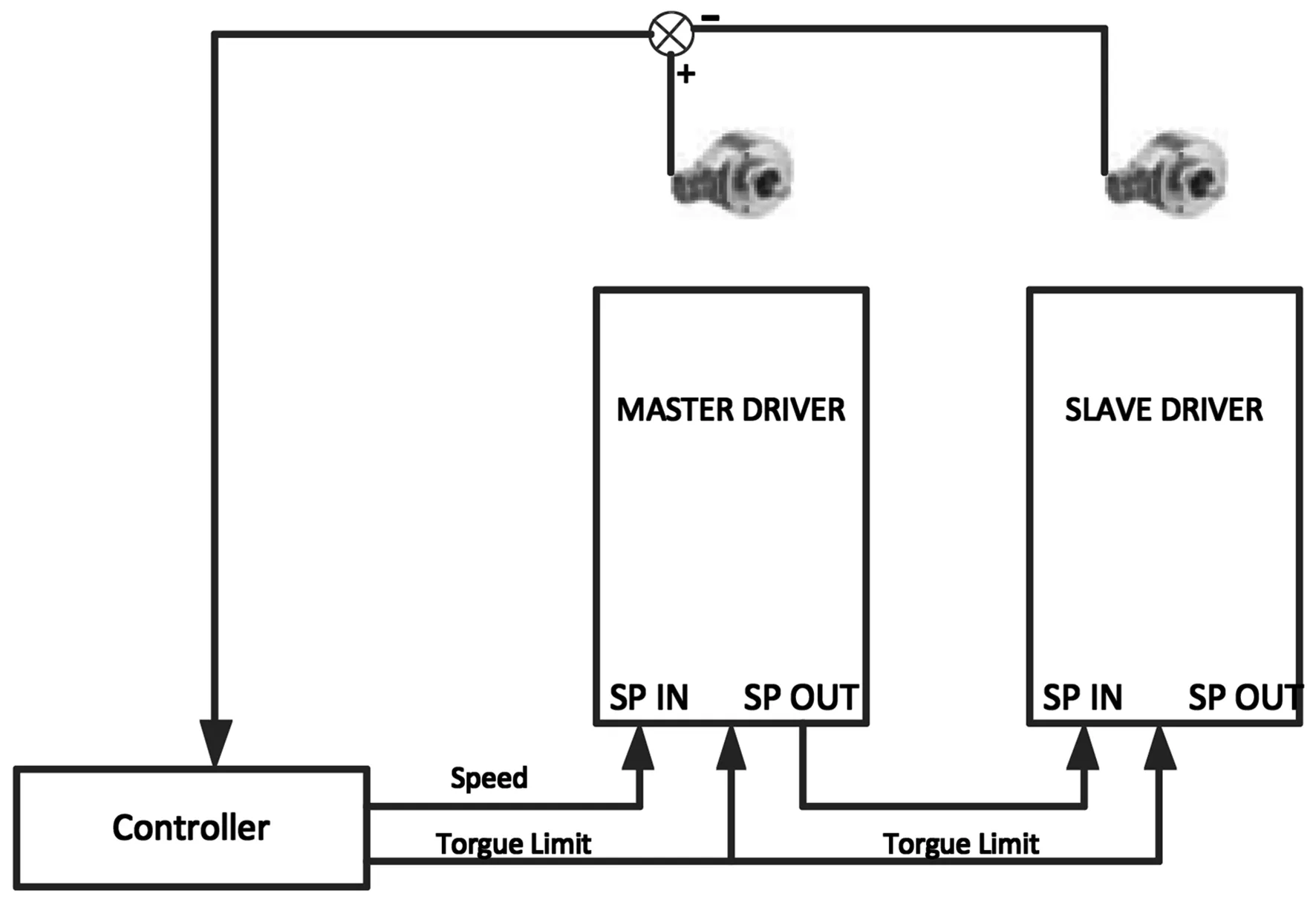
图3 双机驱动同步控制系统原理
EtherCAT采用分布式时钟技术实现从站点之间的精确时钟同步,特别适用于本系统中驱动同步和角度数据采集精确同步的要求。每个EtherCAT从站都有一个独立运行的硬件时钟源,所有从站的本地时钟相对于系统参考时钟各有独立的偏移和漂移误差,经过主站的同步算法补偿后实现从站之间精确时钟同步。分布式时钟技术保证了远程站点端子之间的同步时间误差小于1 μs。[3-4]
4 系统设计
自动架设系统是机动雷达的关键系统之一,其设计的质量直接决定了该雷达的机动性与战场的生存能力,而高性能的伺服控制系统则是自动架设系统高效、稳定运行的重要保障。本文讨论的设计对象为某大型米波机动雷达,其较大的天线尺寸和重量决定了伺服控制系统的设计体量超过了以往的自动架设系统,控制系统组成如图4所示。[5]

图4 某大型米波机动雷达自动架设控制系统组成
控制系统在物理布局上分为两部分,分别布置于平台和天线。网络布局则是组成了一个大的环网结构,通过千兆汇流环完成固定与旋转部分网络的链接。可以看出,相比于以往的CAN网络,EtherCAT网络的拓扑更加灵活。由于不需要设置终端电阻且是环网结构,允许在任意节点插入或删除从站站点而无需整个网络的重新配置。这一特点对于大型系统的调试尤其是样机研制非常有帮助,允许工程师在调试现场根据实装需要方便的进行检测点的增加与删除。
5 软件架构设计
图5为某大型米波机动雷达自动架设控制系统软件架构。
伺服控制系统以TwinCAT 2作为开发软件,编程语言是IEC61131-3标准的结构化文本(ST,Struct Text)。软件结构是标准的分任务循环结构。整个软件系统包含若干个Task(任务)。所有的Task都是按照设定的周期循环执行。每一个Task都有特定的优先级和循环周期。伺服控制系统的所有逻辑功能模块都被设置在特定的Task中。重要的逻辑功能模块要被设置在优先级高的Task中。在每一个Time Base的起点,CPU按优先级由高到低的顺序依次扫描每个任务,根据任务的周期决定是否执行该任务。扫描到没有启用和还没有到执行周期的任务,就跳转到下一个任务。

图5 某大型米波机动雷达自动架设控制系统软件架构
软件系统被分为4个Task,分别为Level1~4,它们的优先级以此递减。与平台和天线架设、驱动控制直接相关的逻辑控制模块都被设置在优先级最高的Level1的Task中,每10ms循环执行一次。警铃、按键、通信、报警等次要的逻辑控制模块被设置在了Level2的Task中,每20ms执行一次。通信的背景程序被设置在Level3的Task中,每10ms执行一次。模块状态扫描等最不关键的功能块被设置在Level4的Task中,每100ms执行一次。
6 结束语
随着机动雷达规模的不断增大,对自动架设控制系统运行的效率、布局的可扩展性以及系统规模都提出了较高的要求。基于实时以太网协议的EtherCAT总线,克服了以往现场总线诸多的弊端,能够充分发挥其运行的实时性、可靠性以及拓扑性强等特点。笔者结合自己多年的工程经验,以某雷达装备应用为例,对EtherCAT的应用特点进行了系统性的介绍和分析,尤其对于系统中涉及到的网络布局以及冗余组网等实际工程问题的讨论,对于相关工程技术人员具有一定的借鉴和参考意义。
[1] 郁极,肖文磊,等.工业以太网EtherCAT冗余和热插拔技术[J]. 北京航空航天大学学报,2009,35(2):158-161.
[2] 王国河,李伟光. EtherCAT冗余技术在多轴网络运动控制系统的应用研究[J]. 组合机床与自动化加工技术,2012(1):58-61.
[3] 郁极,刘喆,等. 实时工业以太网EtherCAT时序特性分析[J]. 北京航空航天大学学报,2013,39(9):1238-1242.
[4] 汪雅楠,谭南林. EtherCAT时钟同步的误差仿真分析[J]. 自动化技术与应用,2011,30(7):22-26.
[5] 汤辉,倪仁品,等. 某米波警戒雷达的全自动架拆系统[J]. 兵工自动化,2008,27(6):17-19.
Application of real-time Ethernet EtherCAT in servo system of a large maneuvering radar
TANG Hui, LIU Zhe
(Laboratory of Mechanical Transmission and Control Engineering,No. 38 Research Institute of CETC, Hefei 230088)
The application of the EtherCAT but technology in the auto-erecting system of a large maneuvering radar is described. Compared with the conventional bus technologies, the features and system requirements of the EtherCAT are discussed, and the redundancy ring network technology and the clock synchronization technology of the EtherCAT are analyzed. In addition, the design method, functions and composition of the auto-erecting control system as well as the networking method of the EtherCAT are introduced empathetically. The contents discussed and the methods involved come from the actual engineering systems, which have certain reference value for the engineering designers of the auto-erecting control system.
EtherCAT; redundancy ring network; clock synchronization
TP271
A
1009-0401(2017)04-0058-04
2017-09-22;
2017-10-20
汤辉(1980-),男,高级工程师,硕士,研究方向:事雷达伺服系统研制开发;刘喆(1985),男,高级工程师,博士,研究方向:雷达伺服控制技术。
猜你喜欢
建材发展导向(2022年18期)2022-09-22
军事文摘(2022年14期)2022-08-26
北京航空航天大学学报(2022年6期)2022-07-02
云南画报(2020年12期)2021-01-18
新世纪智能(数学备考)(2020年9期)2021-01-04
航天工业管理(2020年9期)2020-12-28
金桥(2020年10期)2020-11-26
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
