模拟潜艇磁场的组合式磁源
2018-01-05 08:11刘忠乐石剑文无敌周敏佳
航空学报 2017年12期
刘忠乐,石剑,,文无敌,周敏佳
1.海军工程大学 兵器工程系,武汉 430033 2.海军驻无锡地区军事代表室,无锡 214100
模拟潜艇磁场的组合式磁源
刘忠乐1,石剑1,*,文无敌1,周敏佳2
1.海军工程大学 兵器工程系,武汉 430033 2.海军驻无锡地区军事代表室,无锡 214100
随着航空磁探技术和信号处理技术的发展,航空磁探很可能具备对磁异常信号源的磁场各分量进行探测识别的能力,而目前的磁诱饵研究中,两电极直开口式磁源无法模拟潜艇的空中磁场各分量。针对此问题,提出了3种磁体与两电极式相组合的诱饵磁源方案,建立了空中磁场模型。针对某型潜艇模型的实测数据,通过遗传算法确定了各类磁源的最优参数,并对它们进行了模拟效果分析、热计算及功率计算。结果表明:与两电极式磁源及多磁体两电极组合式磁源相比,单磁体与两电极式相组合的方案能够在保证磁源整体结构相对简单的前提下较好地模拟目标潜艇的磁感应强度各分量,是较优的诱饵磁源结构。
潜艇诱饵;磁源;空中磁场;航空磁探;功率;遗传算法
对于潜艇而言,航空反潜是其作战及生存的主要威胁之一,航空反潜主要通过声学探测、磁探测、光学探测等方式对潜艇进行搜索[1]。在目前的航空反潜设备与潜艇的磁场对抗中,航空磁探设备对潜艇进行探测的主要方式是通过对潜艇产生磁异常信号的幅值进行探测[2],即利用磁探测在较广阔的范围内发现潜艇,进而用声学探测等其它方式进行定位、追踪。文献[3]对该联合搜索方法进行了介绍及仿真,文献[4-7]从不同的角度对空中磁异常探测的数学模型进行了研究。针对航空磁探的威胁,潜艇的主要对抗方式之一是发射能够模拟潜艇物理场的诱饵。在已有的对抗航空磁探的磁诱饵研究中,诱饵磁源大都采用两电极直开口式这种结构简单但能较好地对潜艇空中磁场的总量进行模拟的方式[8]。
然而,随着航空磁探技术和信号处理技术的发展,目前已有学者提出利用磁性目标的磁场矢量对其进行定位、追踪的方法[9-12]。因此,在不久的将来,航空磁探很有可能可以对磁异常信号源的磁场矢量(磁场各分量)进行探测识别。届时,采用两电极直开口式磁源的诱饵将很难对抗航空磁探设备。目前,有多个领域中涉及了对磁场三分量的模拟技术[13-16],但大多是以实验室环境下的应用为背景的,且主要是为了产生均匀磁场,难以直接借鉴到磁诱饵平台中使用。
针对此问题,本文提出了使用磁体与两电极式相组合的诱饵磁源结构,对比了两电极式磁源与3种磁体两电极组合式磁源的模拟效果、稳态温升、功率及结构等,结果表明单磁体两电极式组合的方案能够在保证磁源整体结构相对简单的前提下较好地模拟目标潜艇的磁感应强度各分量,是较优的诱饵磁源结构。
1 组合式磁源的结构及空中磁场模型
首先对两电极式磁源进行介绍,并对其在磁场模拟中的局限性进行分析。
整个两电极直开口式磁场源由电缆和两个电极构成,其结构如图1所示[17]。其中:d为磁源的深度,I为生磁回路电流,L为电缆有效段半长,l为静端电极与动端电极的长度,l′为静端电极与磁体的距离。
文献[17]给出了其空中磁场的计算模型:
(1)
由两电极式磁源的结构可知,其电流回路可以分解为3个主要的电流回路:电缆竖直面上的电流回路及电缆水平面上的左右各一个回路。根据右手定则,其远场磁场主要由y方向及z方向上的磁矩产生,而潜艇磁矩主要为x方向上的磁矩,因此两电极式磁源难以在矢量上对潜艇空中磁场进行模拟。
目前,在各种舰艇磁场源中,螺线管式电磁体能够产生轴向磁矩,与单独使用两电极磁源相比,若使用一定数量的螺线管电磁体与两电极磁源组合作为诱饵磁源,以螺线管电磁体为主模拟潜艇轴向磁矩产生的磁场,两电极部分则对潜艇的其它方向磁矩进行弥补,将能对磁场的各分量进行更好地模拟,以3个磁体与两电极磁源组合为例,其结构示意图如图2所示。
图1 两电极部分的结构
Fig.1Construction of two-electrode magnetic-field source
在对组合式磁源进行磁场建模时,可分别对两电极部分及磁体部分进行分析。
为方便计算,以静端电极与磁体的中点在海水-空气分界面(海平面)的投影O点为坐标原点,x轴与载流直导线平行,动端电极指向静端电极的方向为x轴正向,竖直向下为z轴正向建立空间直角坐标系,如图2所示。
组合式磁源的两电极部分磁场与两电极式磁源磁场类似,可采用式(1)计算。再对磁体部分进行分析,计算各磁体的磁场时,通常可将其简化为磁偶极子模型或旋转椭球体模型,旋转椭球体模型在计算精度上有一定的优势,因此,为尽可能减少误差,本文将其简化为均匀磁化的绕长轴的旋转椭球体,如图3所示。
图2 组合式磁源的结构
Fig.2Construction of combination type magnetic-field source
图3 螺线管磁体的简化旋转椭球体模型
Fig.3Simplified rotational ellipsoid model for solenoid magnet
(2)
(3)


分别得出两电极部分磁场和磁体部分磁场后,即可得到整个磁源在空中任一场点的磁场强度三分量:
(4)
式中:n为磁体的个数。相应的磁感应强度:B=μ0H,μ0=4π×10-7T·m/A为真空磁导率。
2 遗传算法求解参数
第1节得到了组合式磁源的空中磁场模型,根据电磁扫雷具的设计经验可知,在一定范围内使用的磁体数量越多时,其对目标的整体模拟效果越好。同时,由于使用平台的限制,诱饵的结构应该尽量简单以便于布放。这两者在一定程度上是矛盾的,因此,需要对磁体数量不同时的组合式磁源的模拟效果进行对比分析。本文以某型潜艇的空中磁场为模拟目标对诱饵的对抗效果进行评估。首先需要获取潜艇的空中磁场数据,并以其中部分数据为依据确定诱饵的各项参数。
2.1 潜艇磁场数据的获取
以某型潜艇为例,在实验室水池中测量其1/25缩比模型在空中一定区域内产生的磁感应强度,缩比模型与改型实际潜艇几何相似、介质磁化率相同、磁化强度接近。将船模置于水下1 m,测量点均匀分布在水面上方4 m处,以龙骨正上方为中心,左右舷各4条,共计9条测量轨迹(从左至右记为轨迹1#~9#),各条测量轨迹间距为0.4 m,每条测量轨迹以船模处为中心各分布81个测量点,测量点间距为0.1 m。磁传感器为型号Mag-03MSL100,其分辨率为0.1 nT,线性误差<0.001 5%,感应轴间正交误差<0.1°。
根据相似理论[19]可知,上述模型测得的磁感应强度可等同于该型潜艇在相应25倍距离处(即水面上100 m处)产生的磁感应强度,以轨迹1#为例,画出其磁场强度三分量图,如图4所示。
图4 轨迹1处的磁场三分量实测值(y=-40 m)
Fig.4Three-component measured values of magnetic field on 1 track (y=-40 m)
2.2 各磁源的参数求解
在测得的9条轨迹处的磁感应强度中,以轨迹1#~5#共5条轨迹处的磁感应强度为模拟目标,通过遗传算法[20]对两电极直开口式磁源和3种组合式磁源(磁体个数分别取为1、2、3)的各项参数进行求解:设置能够体现潜艇模型磁场实测值与磁源模拟值间差异的适应度函数,并通过遗传算法得到使选定场点内的适应度函数值最小的磁源参数值。
2.2.1 两电极直开口式磁源
使用两电极直开口式磁源模拟潜艇空中磁场以对抗航空磁探时,主要是对目标磁场的幅值进行模拟。因此,其适应度函数可设为
σ1=max(Bmi)-max(Bti)
(5)
式中:Bmi、Bti分别为模拟磁源及目标磁场在各场点处的磁感应强度标量值,则当σ1越小时,磁源磁场在幅值上与目标磁场总值差异越小。
使用遗传算法(GA)进行计算,以两电极直开口式磁源的载流直导线长2L、电极长度l、电流I及两电极式磁源中心相对于原目标的水平坐标(x0,y0)为GA变量,以σ1为适应度函数,场点选取为海拔100 m处轨迹1#~5#对应的5×81个测量点,算得最优结果如表1所示。再对组合式磁源进行求解,使用组合式磁源模拟潜艇空中磁场时,主要以各分量通过特性为模拟目标。根据最小二乘法[21],其适应度函数可设为

(6)
式中:N为选取的拟合场点个数;j=1,2,3分别为磁感应强度三分量;Bmij、Btij分别为相应场点处磁感应强度各分量的模拟值与测量值。则当σ2越小时,磁源磁场在各分量上与目标磁场的差异越小。
因使用平台限制,磁体须满足能够从常用鱼雷发射管中发射的条件,可设其长轴2a=5 m,短轴2b=0.533 m。
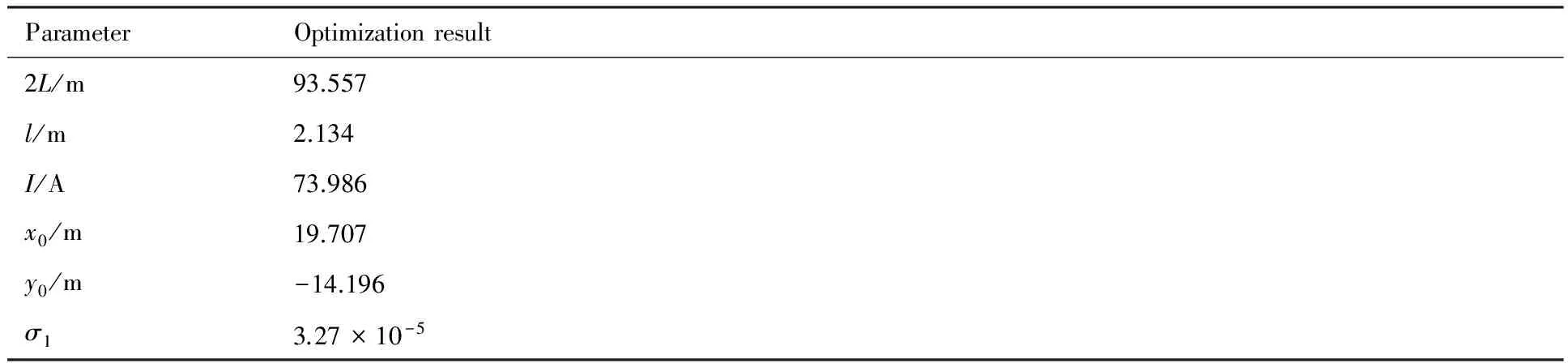
表1 两电极式磁源各项参数的优化计算值
2.2.2 单磁体两电极组合式磁源
以磁体轴向磁矩mx1、两电极式部分的载流直导线长2L、电极长度l、电流I、椭球体中心相对于原目标的水平坐标(x0,y0)及磁体与两电极间距l′为GA变量,以σ2为适应度函数,场点的选取同2.2.1节,即海拔100 m处轨迹1#~5#对应的5×81个测量点,解得其最优结果如表2所示。
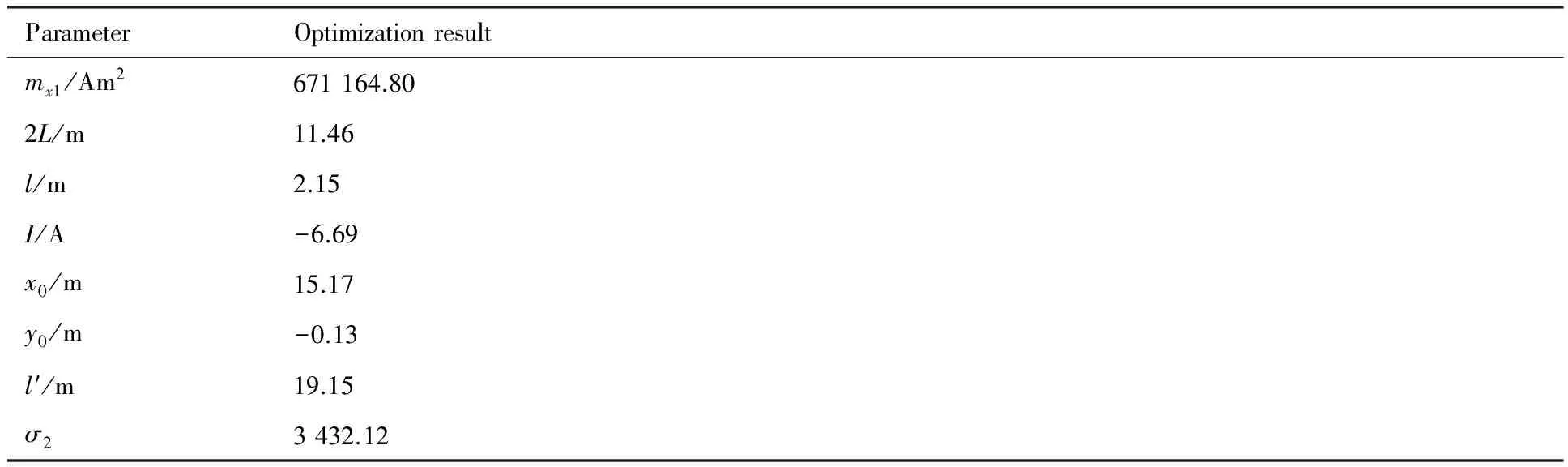
表2 单磁体两电极组合式磁源各项参数的优化计算值
2.2.3 两磁体两电极组合式磁源
相较于单磁体两电极组合式磁源,GA变量增加磁体2的轴向磁矩mx2及磁体1、2间的距离d1,适应度函数及场点的选取不变,解得其最优结果如表3所示。
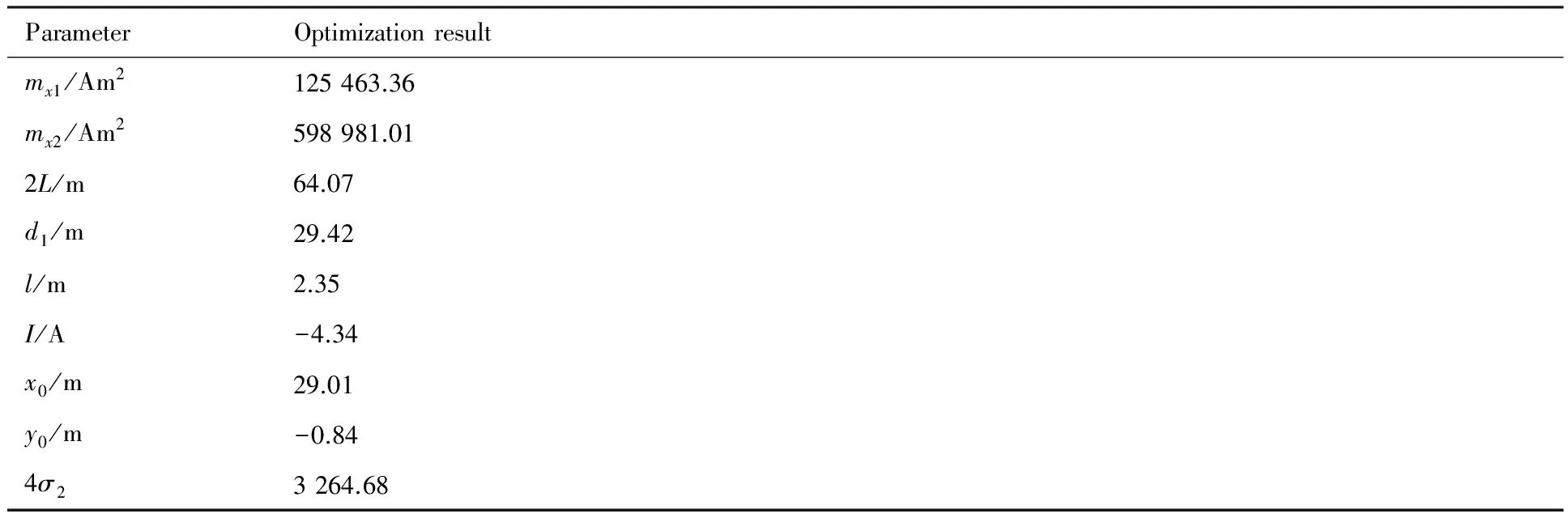
表3 两磁体两电极组合式磁源各项参数的优化计算值
2.2.4 三磁体两电极组合式磁源
相较于两磁体两电极组合式磁源,GA变量增加磁体3的轴向磁矩mx3及磁体2、3间的距离d2,适应度函数及场点的选取不变,解得其最优结果如表4所示。
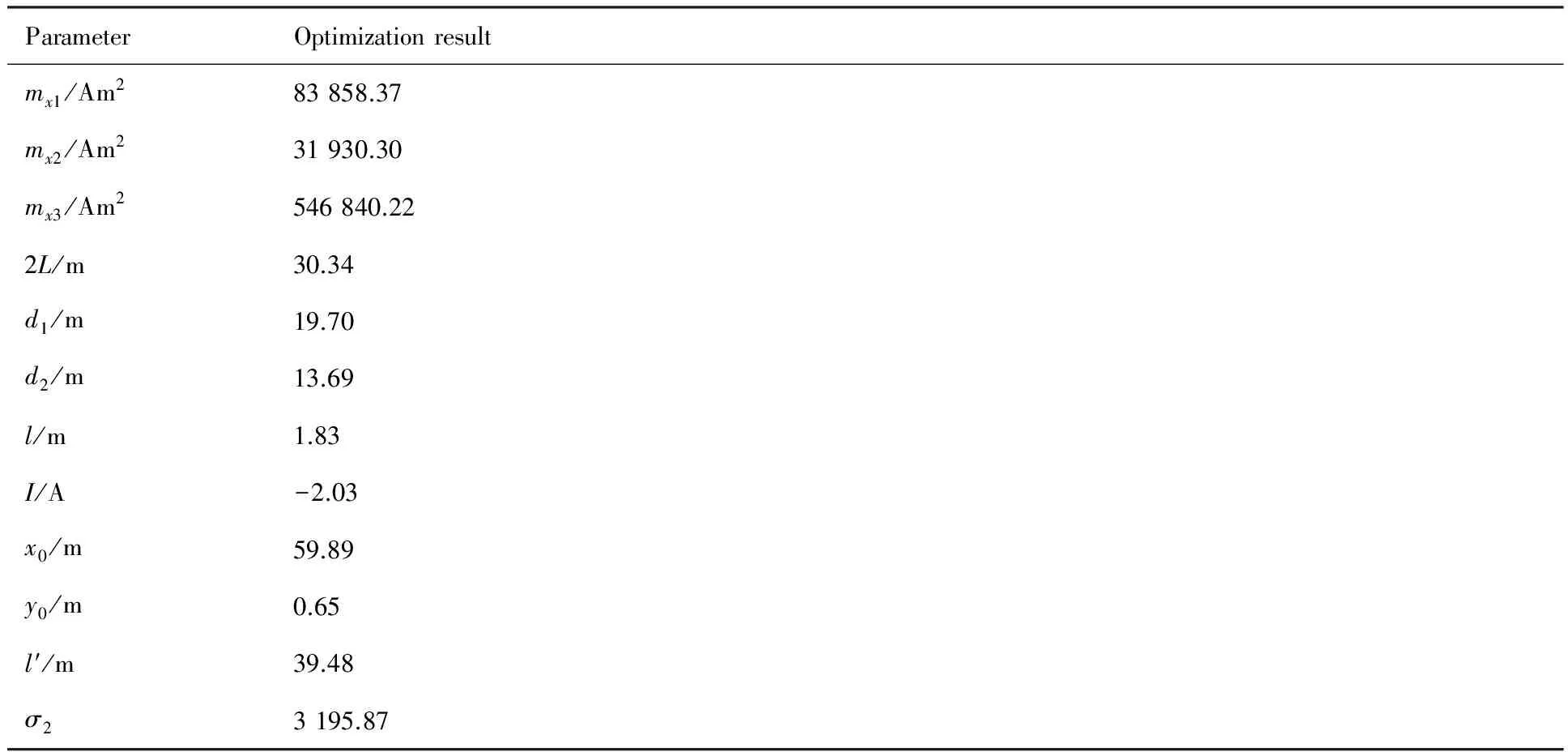
表4 三磁体两电极组合式磁源各项参数的优化计算值
3 磁源的模拟效果分析
在以轨迹1#~5#处磁场测量值为依据分别解得两电极直开口式磁源和3种组合式磁源的各项参数后,可用轨迹6#~9#处的磁场测量值分别对各磁源的模拟效果进行验证及对比。
对于两电极直开口式磁源,以轨迹6#处为例,画出其总磁场与相应测量值的对比情况如图5所示,其磁场三分量与相应测量值的对比情况如图6所示。
同样以轨迹6#处为例,可给出能够体现4种磁源各自在磁场总量上与测量值间偏差的参数值σ1的对比,如表5所示。
图5 两电极式磁源轨迹6处的磁场总量
Fig.5Total magnetic field on 6 track of two-electrode magnetic-field source
由对比可知,两电极式磁源能够较好地在磁场总量上对目标空中磁场进行模拟,但与组合式磁源相比,其对总场的模拟优势并不明显。然而,对目标磁场三分量的模拟情况较差,其在各条轨迹上的适应度函数值σ2如表6所示。
对于3种组合式磁源,同样以轨迹6#处为例,画出其磁场三分量与相应测量值的对比情况如图7所示。
3种组合式磁源在各条轨迹上的适应度函数值σ2如表7~表9所示。
对比图6、图7及表5~表9可知:①相对于两电极直开口式磁源,磁体两电极组合式磁源能够更好地对目标的空中磁场三分量进行模拟;②磁源的磁体数量越多,其对潜艇目标的模拟效果越好,但模拟优势不明显,根据适应度函数值σ2,两磁体两电极组合式磁源仅比单磁体两电极组合式磁源优化13.3%,三磁体两电极组合式磁源也仅比单磁体两电极组合式磁源优化17.1%。
图6 两电极式磁源轨迹6处的磁场三分量
Fig.6Three components of magnetic field on 6 track of two-electrode magnetic-field source
-
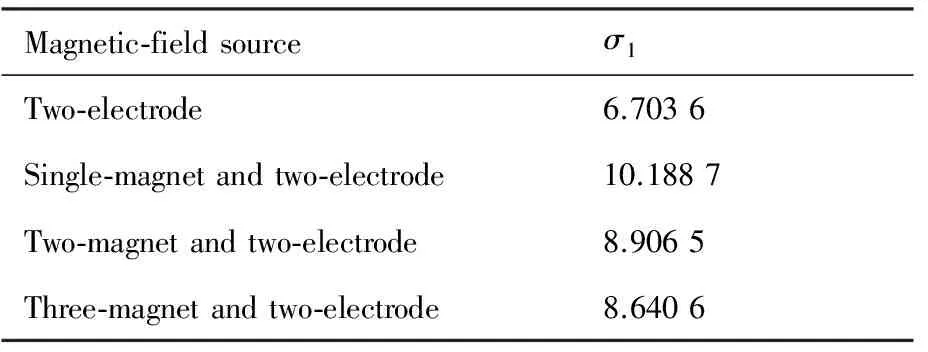
Magnetic⁃fieldsourceσ1Two⁃electrode6.7036Single⁃magnetandtwo⁃electrode10.1887Two⁃magnetandtwo⁃electrode8.9065Three⁃magnetandtwo⁃electrode8.6406

表6 两电极式磁源轨迹6#~9#处的σ2值
图7 磁源轨迹6处的磁场三分量
Fig.7 Combination type maghetic-field source of experiment and analog values of three components on 6 track
~
- -- -

Trajectoryσ26#2646.67#2521.48#2177.99#1753.3

表8 两磁体两电极组合式磁源轨迹6#~9#处的σ2值

表9 三磁体两电极组合式磁源轨迹6#~9#处的σ2值
4 热计算与功率计算
诱饵工作时,需要消耗大量能量,因此,磁源的功率也是其重要指标。显然,当需要产生一定的磁场幅值时,其功率越小,其适用性越大。同时,电缆能够保证多大的通过电流还需要通过热计算进行确定。本节以2.2节中得到的各磁源参数为依据,对其功率及热量情况进行计算对比。
4.1 两电极式磁源的功率与热计算
在表1中,两电极式磁源的最优参数为载流直导线长2L=93.557 m、电极长度l=2.134 m、电流I=73.986 A。当磁源的整个生磁回路电流确定时,求得其回路电阻即可得到整个磁源的功率。生磁回路的电阻主要由电极的接触电阻和电缆电阻两部分组成。
磁源的电极是在海水中运动并产生磁场的,因此,电极的接触电阻可以用位于距海面一定深度的正负水平圆柱状电极的接触电阻模型来等效计算[22]。
图8 电极接触电阻计算模型
Fig.8Computational model for electrode contacting resistance
如图8所示,距离海面深度为d的正负两电极A和B相距为2L(即载流直导线的有效部分的长度),其镜像分别为A1和B1,电极截面半径为r1,长度为l,海水的电导率为γ,通电电流为I,当2L远大于l时,正电极A表面的电位为
(7)
负电极B表面的电位为
(8)
U-=UBA+UBA1+UBB+UBB1=
(9)
电极的接触电阻为
(10)
电缆部分的导电芯线材料选用电阻率低、密度较小、抗拉强度高的铜材料,其20 ℃时的电阻率为ρ1=0.017 5 Ω·mm2/m,电阻温度系数为α1=0.003 93/℃,设其截面半径为r1=1 mm。电缆绝缘层使用长期允许工作温度高、密度低、导热性好的硅橡胶材料,其热阻率为σ=3.981 ℃·m/W,长期允许工作温度为180~200 ℃,设绝缘层厚度为δ=1 mm,则电缆截面半径为r2=r1+δ=2 mm。
电缆部分的电阻可直接用圆柱金属电阻计算:

(11)
根据热欧姆定律,单位长度单芯电缆的热阻为

(12)
电缆长时间工作应满足:
(13)

则有
(14)
代入I=73.986 A、2L=93.557 m,可得RL=0.550 1 Ω、ΔT′=14.135 ℃、Tc=34.135 ℃,因此符合材料的长期工作要求。
因此,整个回路的电阻为

(15)
式中:取磁源工作深度为10 m,电极及电缆线芯的截面半径为1 mm,海水电导率取γ=3.114/mΩ。再由已求得的载流直导线长2L=93.557 m、电极长度l=2.134 m,可求得电阻R=0.809 Ω。
因此,再由I=73.986 A,可得其磁源功率P1=I2R=4 428.4 W。
4.2 单磁体两电极组合式磁源的功率与热计算
组合式磁源的功率为磁体部分与两电极部分的功率之和,根据表2中的各项参数值,首先对两电极部分进行计算,其电缆温升为

(16)
其回路的电阻为

(17)
代入数值计算可求得电阻R1=0.313 6 Ω。因此,再由I=-6.69 A,可得磁源两电极部分功率P′=I2R1=14.0 W。
然后对磁体部分进行分析,诱饵磁源通常采用软磁铁作为铁芯物质,对于空心旋转椭球体铁芯,其长半轴为a,短半轴为b,壳体厚度为δ,假定铁芯材料的相对磁导率μr≥1、短半轴b≥δ,其磁矩可用以下经验公式计算[22]:
(18)
式中:IW为磁化线圈绕组的安匝数,W为匝数;a、b、ld、t及δ为几何尺寸,如图9所示。
磁化线圈消耗的功率为
P″=I2R=I2ρ2Lxq
(19)
式中:ρ2为线圈导线的电阻率;Lxq为线圈总长;2rxq为线圈直径,则线圈缠绕宽度为2ld=W·2rxq,当线圈在磁体中心为中点缠绕时(即t=0时),可推得线圈周长为
(20)
在2.2节中,已经得出磁体的各项参数为:mx=671 164.80 Am2、2a=5 m、2b=0.533 m。由磁化线圈功率式(19)可知,功率P″与I2W成正比,因此I2W应尽可能小。又由铁芯磁矩的计算公式可知,当所需磁矩m及其他参数一定时,t越小,IW也越小,因此可取t=0,δ=0.1 m。铁芯选择磁导率较高且价格较低的工业纯铁,工作点选在最大磁导率处,相对磁导率约为μr=5 000。磁化线圈导线使用兼顾密度小和电阻率小的铝材料,其20 ℃时的电阻率为ρ2=2.85×10-2Ω·mm2/m,电阻温度系数为α2=0.004 29/℃,并采用真空、保温浇注环氧石英树脂工艺,保证了较好的绝缘、防水以及散热性。
线圈导线截面直径取为2rxq=3 mm,其中的芯线直径为2rxx=2 mm,线圈匝数设为W=1 000匝,则线圈覆盖宽度为2ld=1 000×3 mm=3 m。其在长期工作时,可按牛顿公式计算线圈的稳态温升:
图9 软磁铁芯磁体模型
Fig.9 Model for soft magnetic core magnet
ΔT″=
(21)
式中:U为线圈两端电压;R0为芯线常温电阻;kT为综合散热系数;β为内表面散热系数。
根据铁芯磁矩公式可得磁矩所需对应的电流为
(22)
代入相应数值计算可得I=23.269 A。
磁化线圈总长为
Lxq= 2×

则磁体部分功率为:P″=I2R0(1+α2·ΔT″)=9 743.5 W,单磁体两电极组合式磁源的功率为:P2=P′+P″=9 757.5 W。
4.3 两磁体两电极组合式磁源的功率与热计算
同样,对于两磁体两电极组合式磁源,其功率为两个磁体两电极部分的功率之和,详细计算过程不再赘述。
4.4 三磁体两电极组合式磁源的功率与热计算
由上述计算结果可知:① 4种磁源的线圈(电缆)稳态温升均在允许范围内;② 组合式磁源的功率比两电极式磁源高,3种组合式磁源的功率平均比两电极式磁源高93.05%;③ 3种组合式磁源中,磁体数量越多时,磁源的整体功率越小,三磁体两电极组合式磁源的功率比单磁体两电极组合式磁源低22.17%。
根据磁源的模拟效果分析及功率计算可知,组合式磁源对目标磁场的模拟明显优于两电极式磁源,多磁体两电极组合式磁源相比单磁体两电极组合式磁源的优势不明显,而单磁体两电极组合式磁源结构简单,具有更好的平台适用性。因此,在需要对潜艇的磁场三分量进行模拟时,单磁体组合式磁源是一种较优的诱饵磁源结构方案。
5 结 论
本文针对目前的磁诱饵研究中,对目标空中磁场的各分量模拟上的不足,对磁体与两电极式相组合的诱饵磁源进行了研究,得到以下结论:
1) 与两电极式磁源相比,3种组合式磁源能够更好地对潜艇目标的空中磁场三分量进行模拟。
2) 通过对各磁源进行热计算可知,组合式磁源各部分的稳态温升能够满足材料长期工作要求。
3) 与单磁体两电极组合式磁源相比,多磁体两电极组合式磁源在模拟效果及功率上的优势不大。对比表明,单磁体两电极式组合的方案能够在保证磁源整体结构相对简单的前提下较好地模拟目标潜艇的磁感应强度各分量,是较优的诱饵磁源结构。
[1] 孙明太. 航空反潜概论[M]. 北京: 国防工业出版社, 1998: 4-10.
SUN M T. Aviation antisubmarine introduction[M]. Beijing: National Defence Industry Press, 1998: 4-10(in Chinese).
[2] 曾小牛, 李夕海. 基于磁异常探测的航空反潜技术[C]∥ 国家安全地球物理专题研讨会. 武汉: 中国地球物理学会,2009:44-52.
ZENG X N, LI X H. Review of aviation anti-submarine technology based on magnetic anomaly detection[C]∥Chinese Geophysical Symposium on Security. Wuhan: Chinese Geophysical Society, 2009: 44-52(in Chinese).
[3] 崔旭涛, 杨日杰, 何友. 声纳浮标与磁探联合搜潜仿真研究[J]. 系统仿真学报, 2008, 20(16): 4357-4359.
CUI X T, YANG R J, HE Y. Sonobuoy and magnetic detector joint search simulation study[J]. Journal of System Simulation, 2008, 20(16): 4357-4359(in Chinese).
[4] LELIAK P. Identification and evaluation of magnetic-field source of magnetic airborne detector equipped aircraft[J]. IEEE Transactions on Aerospace & Navigational Electronics, 1961, 8(3): 95-105.
[5] HIROTA M, FURUSE T, EBANA K, et al. Magnetic detection of a surface ship by an airborne LTS SQUID MAD[J]. IEEE Transactions on Applied Superconductivity, 2001, 11(1): 884-887.
[6] 韩瑞新, 李春洪, 陆勤夫, 等. 航空反潜中的磁探仪系统仿真研究[J]. 系统仿真学报, 2009, 21(9): 2753-2757.
HAN R X, LI C H, LU Q F, et al. Simulation for magnetic anomaly detection in air anti-Submarine[J]. Journal of System Simulation, 2009, 21(9): 2753-2757(in Chinese).
[7] 王珺琳, 刘金荣, 吕政良,等. 基于空间磁场模型的航空磁探测分析方法[J]. 中国电子科学研究院学报, 2016, 11(1): 32-35.
WANG J L, LIU J R, LV Z L, et al. The aeromagnetic exploration analysis method based on spatial magnetic field model[J]. Journal of China Academy of Electronics and Information Technology, 2016, 11(1):32-35 (in Chinese).
[8] 汪晓雨, 刘忠乐. 基于小型运动载体的潜艇磁诱饵磁场产生方法[J]. 水雷战与舰船防护, 2006, 14(4): 18-21.
WANG X Y, LIU Z L. Method for generating magnetic field of submarine magnetic decoy based on small motion carrier[J]. Mine Warfare & Ship Self-Defence, 2006, 14(4): 18-21 (in Chinese).
[9] CZIPOTT P V, PERRY A R, WHITECOTTON B R, et al. Magnetic detection and tracking of military vehicles: Technical Report, AD-A409217[R]. Washington, D.C.: NASA, 2002.
[10] SHEINKER A, FRUMKIS L, GINZBURG B, et al. Magnetic anomaly detection using a three-axis magnetometer[J]. IEEE Transactions on Magnetics, 2009, 45(1): 160-167.
[11] TEIXEIRA F. Magnetic navigation and tracking of underwater vehicles[C]∥Control Applications in Marine Systems, 2013: 239-244.
[12] PANG H, PAN M, WAN C, et al. Integrated compensation of magnetometer array magnetic distortion field and improvement of magnetic object localization[J]. IEEE Transactions on Geoscience & Remote Sensing, 2014, 52(9): 5670-5676.
[13] AHN S, KIM J. Magnetic field design for high efficient and low EMF wireless power transfer in on-line electric vehicle[C]∥European Conference on Antennas and Propagation, 2011: 3979-3982.
[14] HURTADO V R, GONZALEZ L J. Simulation of the magnetic field generated by square shape Helmholtz coils[J]. Applied Mathematical Modeling, 2016, 40(23):9835-9847.
[15] BEIRANVAND R. Magnetic field uniformity of the practical tri-axial Helmholtz coils systems[J]. Review of Scientific Instruments, 2014, 85(5): 08D904-1.
[16] 胡彬. 地磁屏蔽室内磁场模拟与控制技术研究[D]. 南京: 南京理工大学, 2014: 4-19.
HU B. Research on magnetic field simulation and control technology in geomagnetic shielding room[D]. Nanjing: Nanjing University of Science& Technology, 2014: 4-19(in Chinese).
[17] 刘忠乐,石剑,文无敌. 磁诱饵空中磁场模型及其试验验证[J]. 探测与控制学报, 2015, 37(1): 1412-1417.
LIU Z L, SHI J, WEN W D. Validation experiment method of magnetic bait’s magnetic field model [J]. Journal of Detection & Control, 2015, 37(1): 1412-1417(in Chinese).
[18] 林春生,龚沈光. 舰船物理场[M]. 2版. 北京: 兵器工业出版社, 2007: 54-55.
LIN C S, GONG S G. Ship physical field[M]. 2nd ed. Beijing: The Publishing House of Ordnance Industry, 2007: 54-55(in Chinese).
[19] SORBJAN Z. Encyclopedia of Environ metrics[M]. Newyork: John Wiley & Sons, Ltd, 2013.
[20] 王小平, 曹立明. 遗传算法:理论、应用与软件实现[M]. 西安: 西安交通大学出版社, 2002.
WANG X P, CAO L M. Genetic algorithm: Theory, application and software implementation[M]. Xi’an: Xi’an Jiaotong University Press, 2002 (in Chinese).
[21] 武殿梁, 黄海量, 丁玉成,等. 基于遗传算法和最小二乘法的曲面匹配[J]. 航空学报, 2002, 23(3): 285-288.
WU D L, HUANG H L, DING Y C, et al. Surfaces matching algorithm based on genetic algorithm and least square criterion[J]. Acta Aeronautica et Astronautica Sinica, 2002, 23(3): 285-288(in Chinese).
[22] 温正雄, 刘忠乐. 非接触扫雷具设计原理[M]. 北京: 海潮出版社, 2001: 72-98.
WEN Z X, LIU Z L. Design principle of non-contact mine sweeper[M]. Beijing: Haichao Press, 2001: 72-98(in Chinese).
Combinationtypemagnetic-fieldsourceforsimulatingsubmarinemagneticfield
LIUZhongle1,SHIJian1,*,WENWudi1,ZHOUMinjia2
1.DepartmentofWeaponryEngineering,NavalUniversityofEngineering,Wuhan430033,China2.MilitaryRepresentativeOfficeofNavyinWuxiDistrict,Wuxi214100,China
Withthedevelopmentofaeromagneticdetectionandsignalprocessingtechnologies,aeromagneticdetectionequipmentishighlylikelytohavetheabilitytorecognizethemagneticfieldcomponentsofthemagneticanomalysourceinthenearfuture.However,inthecurrentresearchonthemagneticdecoy,thetwo-electrodedirectopeningmagnetic-fieldsourcecannotsimulatethecomponentsofthesubmarinemagneticfieldintheair.Tosolvethisproblem,adecoymagneticfieldsourceschemecombiningthreetypesofmagnetsandthetwo-electrodemagnetic-fieldsourceareproposed,andthecalculationformulasforthemagneticfieldsintheairhavebeenmodeled.Basedonthemeasureddataofasubmarinemodel,theoptimalparametersofallkindsofmagnetic-fieldsourcesaredeterminedbythegeneticalgorithm.Thesimulationresultsarethenanalyzed,andthermalcalculationsandpowercalculationsarecarriedout.Acomparisonwiththetwo-electrodetype,aswellasmulti-magnettwo-electrodemagnetic-fieldsources,thesingle-magnettwo-electrodemagnetic-fieldsourceisabetterstructureschemeforthedecoy,whichcanbettersimulatethecomponentsofthemagneticinductionintensityofthetargetsubmarinewhentheoverallstructureofthemagnetic-fieldsourceisrelativelysimple.
submarinedecoy;magnetic-fieldsource;magneticfieldinair;aeromagneticdetection;power;geneticalgorithm
2017-03-13;
2017-04-10;
2017-05-09;Publishedonline2017-05-251021
URL:http://hkxb.buaa.edu.cn/CN/html/20171222.html
.E-mailj_shi@foxmail.com
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2017.321240
2017-03-13;退修日期2017-04-10;录用日期2017-05-09;网络出版时间2017-05-251021
http://hkxb.buaa.edu.cn/CN/html/20171222.html
.E-mailj_shi@foxmail.com
刘忠乐,石剑,文无敌,等.模拟潜艇磁场的组合式磁源J. 航空学报,2017,38(12):321240.LIUZL,SHIJ,WENWD,etal.Combinationtypemagnetic-fieldsourceforsimulatingsubmarinemagneticfieldJ.ActaAeronauticaetAstronauticaSinica,2017,38(12):321240.
V2;TJ67;TJ86
A
1000-6893(2017)12-321240-11
苏磊)
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
现代交通与冶金材料(2022年3期)2022-06-15
科普童话·神秘大侦探(2022年4期)2022-05-26
东北大学学报(自然科学版)(2022年4期)2022-05-18
读者·校园版(2020年19期)2020-09-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
公务员文萃(2015年9期)2015-09-29
伴侣(2015年7期)2015-07-16