GNSS与测量机器人技术应用于碾压施工质量监控的对比分析
2018-01-04 03:27:16严国齐张文余峰李扬谭冲
城市勘测 2017年6期
严国齐,张文,余峰,李扬,谭冲
(1.武汉航发建设有限公司,湖北 武汉 430023; 2.武汉大学测绘学院,湖北 武汉 430079;3.武汉导航与位置服务工业技术研究院有限责任公司,湖北 武汉 430073)
GNSS与测量机器人技术应用于碾压施工质量监控的对比分析
严国齐1*,张文2,余峰3,李扬1,谭冲1
(1.武汉航发建设有限公司,湖北 武汉 430023; 2.武汉大学测绘学院,湖北 武汉 430079;3.武汉导航与位置服务工业技术研究院有限责任公司,湖北 武汉 430073)
填筑工程碾压施工质量监控可采用GNSS和测量机器人技术,并在实际工程应用中取得了较好的质量控制效果,实现了及时、快速、直观地监控碾压施工质量之目的。这两种技术因其自身的特点,在应用中存在差异性,本文从系统构成、适用场景、数据精度等三方面对这两种技术的应用做了详细的对比分析。
GNSS;测量机器人;碾压施工;质量监控
1 引 言
随着我国基础设施建设的加速,在高速公路的路基、混凝土面板堆石坝的坝体、大型建筑的地基等工程中,土石方填筑施工具有工程量大、施工强度高以及大规模机械化作业等特点,对填筑施工质量的要求也越来越高,因此实现碾压施工过程中的精细化质量控制显得尤为重要。填筑碾压施工过程质量的控制以碾压参数控制为主,采用传统的人工现场控制碾压参数和试坑取样的检测技术(即所谓“双控”方法)已经难以保证施工质量。如何能够及时、快速、直观地监控碾压施工质量成为一个迫切的需求。随着卫星导航定位技术、智能全站仪、无线通信、计算机等技术的发展,武汉大学黄声享等学者于2003年将GPS定位技术应用于大坝填筑施工质量监控,研发了大坝填筑施工质量GPS实时监控系统,并成功应用于湖北清江水布垭水电站面板堆石坝的填筑施工中[1,2];2010年武汉大学黄声享等学者又开发了基于测量机器人的大坝填筑施工质量监控系统,并在在建的湖北溇水江坪河水电站大坝工程中得到成功应用[3,4]。
GNSS和测量机器人技术都是20世纪90年代以来得到广泛应用的测量定位新技术,它们在相关填筑工程的碾压施工质量控制中的应用,是先进测量技术与实际工程相结合的典型案例。工程实践应用已验证这两种技术都能很好地实现填筑工程碾压施工过程的质量监控,但这两种技术因其自身的特点在应用中存在差异性,主要表现在系统构成、适用场景、数据精度等方面。本文将从这三个方面对两种技术的应用情况做对比分析。
2 系统构成对比
基于GNSS的填筑碾压施工质量监控系统主要由监控中心、数据中心、GNSS基准站、移动远端组成,如图1所示。基于测量机器人的填筑碾压施工质量监控系统主要由监控中心、数据中心、基站集、移动远端组成,如图2所示。对比图1、图2可知,基于两种技术实现的系统主要区别在移动远端和基站这两部分。
(1)移动远端
基于GNSS技术的监控系统在移动远端安装的设备是GNSS接收机、GNSS天线以及无线通信设备。基于测量机器人的监控系统在移动远端则只需要在车顶安装信息反射装置。
基于GNSS技术,碾压机械的位置信息在移动远端获取,即接收机接收卫星信号和差分信息来确定空间坐标,然后将坐标信息通过无线通信设备传输到数据中心。而基于测量机器人,碾压机械的位置信息在基站集获取,即架设在已知点上的测量机器人通过跟踪信号反射装置获取目标空间坐标,坐标数据传输到数据中心也是在基站集完成。
对比分析可知,基于GNSS技术的系统在移动远端中设备较多,安装起来也较为复杂,需要考虑供电等问题,同时设备价格也较高,需要考虑设备的安全性。
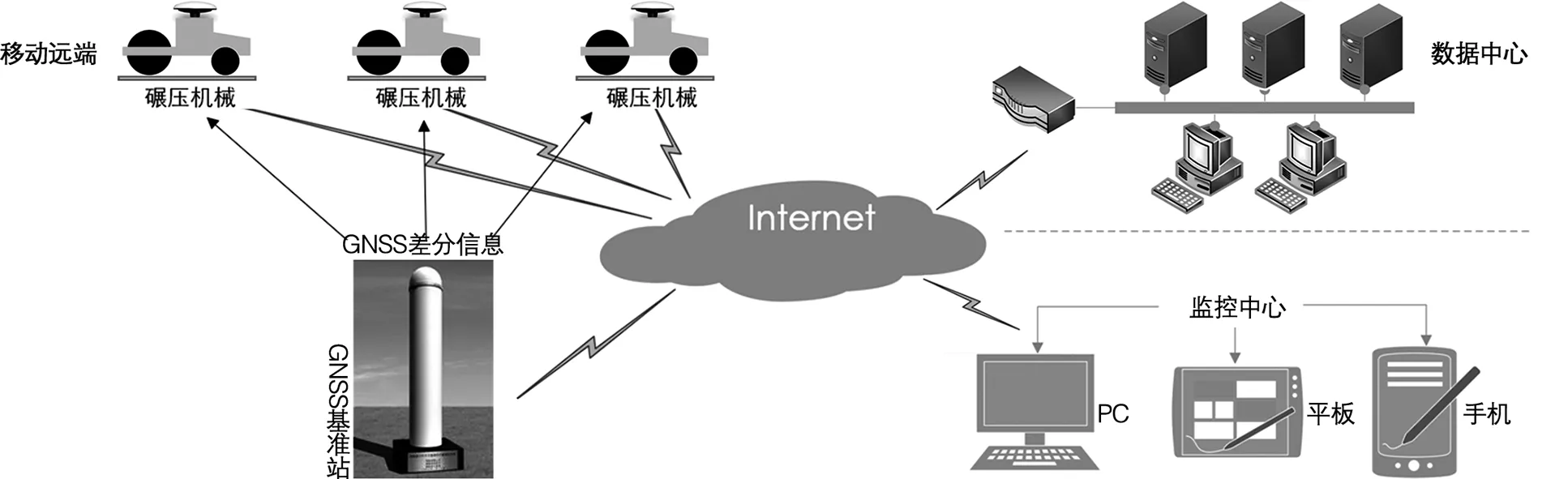
图1基于GNSS的填筑碾压施工质量监控系统组成
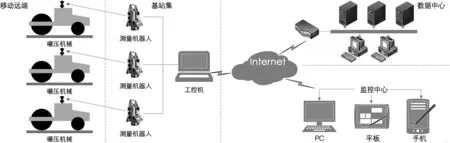
图2 基于测量机器人的填筑碾压施工质量监控系统组成
(2)基站部分
基于GNSS技术的监控系统为保证定位精度采用RTK测量模式,所以需要在满足距离现场较近、天空位置开阔、基础牢固、网络和供电稳定等[5]要求的地方建设GNSS基准站,实时给移动远端分发差分信息。而基于测量机器人的监控系统的基站部分,则是用于布置测量机器人和计算机以及通信设备,实现监控数据的自动化采集和传输,布设在施工现场附近基础稳定的制高点处,且对碾压施工区域具有良好的通视条件。
基于GNSS技术,基准站只需要建立一个,一般情况,为便于供电、管理和维护,GNSS基准站可建立在监控中心。而基于测量机器人技术,基站部分则因为一台测量机器人只能跟踪一个目标,所以在多个目标的情况下需要建立多个基站组成基站集,为便于设备的安全和维护,一般根据现场情况,建设成包含多个基站的观测房。
3 适用场景对比分析
GNSS定位技术要求天线上空视野开阔,在一定的高度角(一般为10°~15°)以上无遮挡,这样才能保证可见卫星构成良好的几何图形,接收到较好的卫星信号。另外,GNSS卫星信号是电磁波,对天气抗干扰能力强,所以GNSS定位具有很强的环境适应性,无论是干燥的沙漠之中,或者寒冷的高山之巅,或者偏僻的孤岛之上,或者大雨中都可以进行定位。
测量机器人定位不需要对空通视,但需要架设仪器的基站与测量目标之间保持通视,同时由于测程的限制,所以一般选择距离施工区域较近、能够与施工区域完全通视的地方布设基站。另外,测量机器人测距是激光测距,信号受天气影响较大,尤其是雨雾天气,会导致仪器无法识别目标。
对比分析可知,GNSS技术适用于环境开阔的场景,例如开阔山谷中的大坝、机场、公路等工程;而测量机器人在对天空通视较差的狭长山谷中的大坝工程中则更为适用。例如,某水电站的坝址位于峡谷河段内,峡谷河道长约 600 m,河谷呈V形,河谷狭窄,高宽比约为1∶1.8,坝址区为岩溶峡谷,两岸山体雄厚,岸坡多为悬崖和陡坡,高程 350 m以下两岸峭壁耸立,以上地形陡峻,坡角30°~60°,所以该工程选用基于测量机器人的填筑碾压施工质量监控系统。
4 数据精度对比
基于GNSS的填筑碾压施工质量监控系统采用多系统GNSS RTK定位技术。随着GLONASS系统再次实现24颗卫星满星座部署以及我国独立自主研发的北斗BDS系统已具备向我国及周边地区提供定位服务能力,与过去原有的GPS单系统RTK相比,GPS+BDS+GLONASS三系统RTK极大地增加了可视卫星数,有效地增强了观测卫星的图形强度、提高了定位结果的精度和可靠性[6]。目前,RTK平面定位的标称精度为 1 cm+1 ppm,只要施工区域在处于GNSS基准站的服务范围内,系统的平面位置精度足以满足碾压机械的运行轨迹、运行速度和碾压遍数的实时监控精度要求。在高程方面,适当考虑数据采集方法并采用合理的高程拟合模型,可达到±(1~2)cm的高程精度,从而能够满足填筑施工摊铺层厚度与平整度的控制需要[7]。
基于测量机器人的填筑碾压施工质量监控系统采用极坐标法[8]进行目标定位。该方法的测量定位精度估计可表达为:


(1)
其中,β为竖直角测量值,S为斜距,mS为测距误差,mβ为测角误差,mi、mv分别是仪器高和目标高的测量误差。
以某填筑工程所采用的测量机器人质量监控为例,在自动跟踪模式下该测量机器人的距离测量精度为 3 mm+1.5×10-6ppm,ATR测角精度为1″。因填筑施工区域不大,可忽略球气差影响,同时可忽略仪器高与目标高的测量误差。由式(1)可见,当仪器的测距、测角精度一定时,测量点的点位精度和高程精度只与距离、垂直角大小有关。当S=500 m时,用不同的β值分别代入式(1),可得表1所示的点位坐标测量精度,可知基于测量机器人获取的碾压机械空间位置坐标平面和高程精度均在mm级。
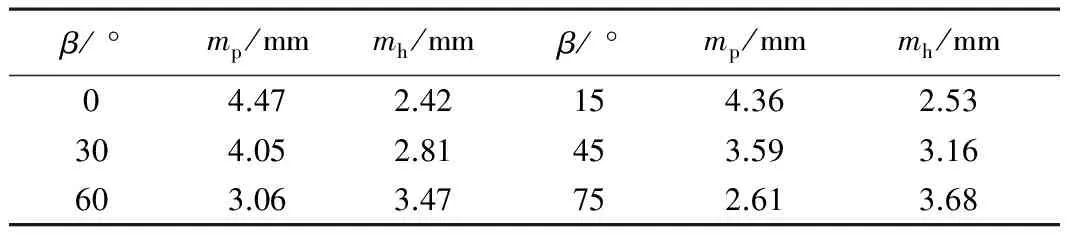
距离为500 m时不同垂直角对应的坐标精度 表1
从数据精度对比可知,两种技术采集的数据精度均能达到施工质量监控的技术要求。在较小的施工范围内,使用测量机器人获取的数据精度更高,施工质量参数的控制也更为精确。
5 结 语
通过系统组成、适用场景、数据精度的对比可知,GNSS和测量机器人两种技术在填筑碾压施工质量监控中都得能得到较好应用,但在应用中,因其自身的特点影响,存在差异性。GNSS技术对于天气条件的抗干扰性强,不受雨雾影响,适用于范围大,但其在碾压机械上安装的设备较多且昂贵,需要考虑设备使用的稳定性和安全性;测量机器人技术在碾压机械上安装设备简单、便宜,采集的数据精度高,但其受测程限制,监控的有效范围较小,另外在雨雾等天气影响下,有时会出现无法监控的情况。所以,总体而言,GNSS技术在天空开阔、大规模机械施工等场景中优势明显,而测量机器人则更适用于施工范围较小、陡峭峡谷的工程场景。
[1] 黄声享,刘经南,吴晓铭. GPS实时监控系统及其在堆石坝施工中的初步应用[J]. 武汉大学学报·信息科学版,2005,30(9):813~816.
[2] 吴晓铭,黄声享. 水布垭水电站大坝填筑碾压施工质量监控系统[J]. 水力发电,2008,34(3):47~49.
[3] 邓文彬,阿力甫·努尔买买提. 测量机器人在隧道仰拱路基施工面的碾压监测[J]. 工程勘察,2015,3:57~60.
[4] 张文,黄声享,李洋洋等. 基于测量机器人的填筑施工质量实时监控系统的研究与应用[J]. 测绘通报,2016(S2):121~123.
[5] GB/T18314-2009. 全球定位系统(GPS)测量规范[S].
[6] 姚宜斌,胡明贤,许超钤. 基于DREAMNET的GPS/BDS/GLONASS多系统网络RTK定位性能分析[J]. 测绘学报,2016,45(9):1009~1018.
[7] 黄声享,曾怀恩. GPS实时控制系统碾压试验的高程精度评定[J]. 测绘信息与工程,2004,29(5):39~40.
[8] 郭际明,梅文胜,张正禄等. 测量机器人系统构成与精度研究[J]. 武汉测绘科技大学学报,2000,25(5):421~425.
ComparisonofGNSSandGeorobotTechnologyinRollingConstructionQualityMonitoring
Yan Guoqi1,Zhang Wen2,Yu Feng3,Li Yang1,Tan Chong1
(1.Wuhan Airport Development Construction Co.,Ltd.,Wuhan 430023,China; 2.School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China; 3.Wuhan Navigation and LBS,Inc.,Wuhan 430073,China)
The GNSS and Georobot technology have been applied in Rolling Construction Quality Monitoring,and both of them have achieved good results. This paper compares and analyses the application of these two techniques in rolling construction,on aspects of monitor system,use conditions,precision.
GNSS;georobot;rolling construction;quality monitoring
1672-8262(2017)06-98-03
P228,P258
A
2017—10—06
严国齐(1969—),男,高级工程师,主要从事市政工程项目管理等工作。
张文(1988—),男,博士研究生,研究方向:精密工程测量、变形监测与灾害预警等。
国家自然科学基金资助项目(41274020)
猜你喜欢
车主之友(2022年4期)2022-08-27 00:56:24
文苑(2020年8期)2020-09-09 09:30:20
东坡赤壁诗词(2018年5期)2018-12-17 12:19:22
电子制作(2018年11期)2018-08-04 03:25:38
水利水电工程设计(2017年1期)2017-05-17 05:20:20
探索科学(2017年4期)2017-05-04 04:09:47
中国交通信息化(2016年8期)2016-06-06 03:56:25
测绘科学与工程(2016年5期)2016-04-17 06:51:15
移动通信(2015年17期)2015-08-24 08:13:10
电子设计工程(2015年3期)2015-02-27 12:03:45