视频检测技术对车流量的研究与应用
2018-01-03 07:05胡志承中国石油大学胜利学院基础科学学院谢炜中国石油大学胜利学院高教研究中心
数码世界 2017年12期
胡志承 中国石油大学胜利学院基础科学学院 谢炜 中国石油大学胜利学院高教研究中心
王劲松 中国石油大学胜利学院教学科研处 崔震 中国石油大学胜利学院基础科学学院
视频检测技术对车流量的研究与应用
胡志承 中国石油大学胜利学院基础科学学院 谢炜 中国石油大学胜利学院高教研究中心
王劲松 中国石油大学胜利学院教学科研处 崔震 中国石油大学胜利学院基础科学学院
通过视频检测技术统计车流量时,常常需要将多种算法混合使用才能达到预期的效果。本课题主要研究的是白天天晴的情况,此时车身清晰可见,车流量检测首先需要解决的是车辆检测的问题,即从复杂的交通情景中提取前景图。在不同的应用中,对于前景的定义也不同。而本文研究的车流量统计是通过静止的摄像机拍摄运动的车辆,所以交通场景是基本静止不动的,运动的是车辆。所以将车辆区域作为前景图,其余部分则是背景。但是,在实际道路交通场景中,背景并非完全静止,光线的变化,刮风引起的机械晃动等都会引起背景的变化,所以要在实际场景中准确提取前景并非容事。而且在晴天时,阴影的检测与去除也是要解决的关键问题,因为阴影会伴随车辆运动,会被误认为前景图。
视频检测 背景建模
随着社会经济的发展,交通需求日益增加,城市道路就得到快速的发展。然而,随着交通运输急剧快速增长,我国面临的交通问题日趋严重,在城区高峰期出现拥挤、阻塞现象,变相引起交通事故频发,以及交通环境恶化。
如何安全高效地对交通进行管理,就显得非常重要。解决这一问题的关键就是建立智能交通系统(ITS),其中车流量检测系统是智能交通系统的基础。它为智能控制提供重要的数据来源。
本文研究的是在城市交通密集道路环境下完成交通车流量的获取,首先对视频图像提取背景模型,进而通过图像差分获得前景图像(即运动目标),并进行图像二值化以及去噪等图像预处理过程,而后通过设置虚拟检测线实现对车流量的统计,最终得到车流量信息。
1 视频检测技术
视频检测技术是指利用计算机技术、模式识别技术、视频图像处理技术以及人工智能技术,对所获视频的图像序列进行自动分析与处理,从而类检测、识别与跟踪相关的运动目标,并对该目标的状态做出描述与判断,可以确保在产生异常状况时及时有力地采取应对措施的智能监控技术。在如今的交通系统中,基于视频的车辆检测系统所占比例相当之高,预示着交通系统的下一步发展方向,其应用前景非常广阔。

通过将视频检测技术与传统的车辆检测技术相比较,可以发现其优越性是显而易见的,具体优缺点如表1所示。

视频检测利用计算机技术、图像处理技术与现代通信技术等相结合,来获取交通实时信息能够给交通部门提供直观的可视图像,获得多种交通信息车辆之间互相遮挡的情况不易处理;阴影积水或昼夜转换等容易影响检测结果
1.1 视频检测技术的主要方法
1.1.1 虚拟线圈检测法
所谓虚拟线圈是从传统的地理式电磁感应线圈延伸而来,它的原理也与之相类似,通过在所获取的交通道路上设置一个感兴趣区域,并将其作为主要的待测区域来进行研究,而之所以需要设置虚拟检测区域,是因为在识别到运动目标之后,为了减少程序的运算量,提高系统的实时性,只对设置的虚拟区域内的图像变化特征进行研究和处理来获取车流量,而不需要对整个图像都进行研究。
通常情况下,虚拟线圈的设置主要有2种,检测线与检测线圈。如图1所示。
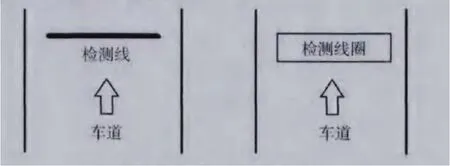
图1 虚拟线圈示意图
1.1.2 目标跟踪检测法
基于跟踪算法的车流量统计算法的整体思路是:根据交通视频中相邻的前后帧之间存在的强相关性,通过对当前帧图像中的运动目标的特征(包括大小、形状、位置等信息)进行提取,再讲该特征与相邻帧图像进行对比和匹配,从而对该目标进行识别和锁定,进行对后续的车辆跟踪提供保障,最终得到该车辆目标的运行轨迹。图2是基于目标跟踪的车流量统计算法的效果图。

图2 目标跟踪算法效果图
1.2 常用的目标检测算法
只有正确地检测出运动目标才可以进行后续的工作,否则会产生较大的偏差甚至错误从而影响到后面工作的正常进行。因此,对于运动目标的检测来讲,其检测效果的好与坏决定了整个系统质量。通常,对于一个好的运动目标检测算法,不仅需要准确第检测出运动目标,还要能够迅速地适应外界环境的各种变化,即抗干扰能力强、处理速度快且实时性号。
但是,对于同一个算法来讲,如果希望其同时符合以上的所有条件是非常困难的,这是因为实际的监控环境往往复杂得多,而且有些条件之间本身就存在矛盾。因此,只能对实际应用环境和最终的需求做出一个整体的考量,得出相对最均衡的条件,来是整个系统的性能达到最优。
现如今使用最多的运动目标检测算法有3类:帧差法、光流法和背景差分法。
1.3 背景模型的建立
对于交通图像中背景图像的提取包括人为的方法和自适应方法。人为提取方法是指在理想的情况下(即视频图像中本身不存在任何运动目标)来直接提取出该帧图像,将其作为背景图像,然后再利用背景差分法,检测运动目标。然而,在实际的交通视频序列中,没有运动目标的图像是很难获取的,并且就算在某一时刻下成功提取了背景,背景也会随光线变化又或者新背景的加入而发生改变,因此,这种人为直接提取背景的方法并不适合不断变化的交通环境。所以在实际项目开发中,最常用的是采用自适应的方法来提取背景。
2 基于虚拟检测线的车流量统计
当前基于视频检测的车流量的统计方法主有目标跟踪检测法和虚拟线圈检测法,通过分析和对比,2种车流量统计方法各有其优缺点,具体说来,目标跟踪检测法在车辆数目统计方面更加准确可靠,而虚拟线圈检测法在时间的复杂度方面表现比较优异,因此本文出于对实时性的考虑,最终选用虚拟线检测法来获取车流量信息。检测过程如图3所示。
该模型首先需要在车道上设置虚拟检测线,然后将图像进行处理,获得目标前景图,通过虚拟检测线来检测车辆是否通过,最终根据虚拟检测线的状态来获得车辆计数,从而得到车流量信息。
2.1 基于虚拟检测线的车流量统计模型的分析
2.1.1 虚拟检测线的设置
本文所研究的对象是城市车辆密集的道路,而城市车辆密集道路的情况与普通高速路口或单向路口相比要复杂得多。因此虚拟检测线的设置,需要视交通道路的实际情况而定,根据该道路的特点,来选用符合该道路的设置方式。图4取自东营市济南路的其中一个路段。

图3 基于虚拟检测线的检测模型流程图

图4 实际交通道路图
虚拟检测线的设定主要包括2个内容:长度的设置和位置的设置。
(1)虚拟检测线的长度设置
一般来讲,虚拟检测线的长度最好要大于车辆的宽度,而又稍小于车道宽度。
(2)虚拟检测线的位置设置
虚拟检测线的位置设定需要根据交通路口的特点,主要考虑的是该车道内车辆是否全部从该车道的虚拟检测线中经过,并且所设虚拟检测线中是否有别的干扰。
2.1.2 基于虚拟检测线的车流量检测算法
将本文中车辆计数的整个过程总结如下:
(1)通过摄像机采集交通视频后,首先将每一帧的彩色图像转换为灰度图像,进而再对图像做一些后续的处理,如平滑和去噪。
(2)采用改进的均值法对背景图像进行提取,再用背景差分法将当前帧的灰度图像与背景图像作差,得到前景图像,也就是运动车辆目标。
(3)使用自适应阈值的方法对前景图像进行图像二值化处理,得到只含黑点和白点的二值图像(其中白色部分就是运动目标),并通过形态学的一系列处理,对二值图像里车辆目标中出现的孔洞进行填充,最后对其他较小的活动目标进行去除。
(4)在上面得到的图像中选取合适的位置设置模拟检测区域。
(5)同时在每一个虚拟检测区域进行下列运算:
某一车辆在经过虚拟检测线的时候,通过采用一个表示检测线状态的变量T,当状态T为0时,代表当前图像的检测线内没有车辆通过,当状态T为1时,代表当前图像的检测线有车辆经过,从而来根据检测线状态的变化,对车辆进行计数。
2.2 基于虚拟检测线的车流量统计模型的实验情况
2.2.1 实验中虚拟检测线位置及说明
根据对视频素材的车辆状况进行观察和分析,最终选定如下图所示位置作为虚拟检测线位置。

图5 虚拟检测线位置
理由主要有以下几点:
(1)车道上的直行车辆基本都会从检测线通过。
(2)没有行人过马路的干扰。
(3)在该路段不存在横行车辆的干扰。
3 实验结果及分析
本实验在Windows8.1环境下编写程序,运行效果如图5所示。

表2 实验数据
从表中数据可以看出:
对于整个计数结果,检测数量普遍小于实际值,这主要是由于个别车辆进入虚拟线圈之后出现粘连现象,将多辆车误检为一辆车来进行计数。
4 结束语
本文主要介绍了基于虚拟检测线的车流量统计模型的建立和实验情况,对城市密集交通道路进行分析和说明,以及在此基础上提出了车流量统计孙发,最终的实验结果表明,本文所用统计方法比较可行,能基本满足系统要求。
[1] 杨俊.基于视频检测的城市智能交通系统应用研究[J].测控技术,2003,22(3).
[2] 朱志刚,徐光佑.VISATARAM:全天候自动交通检测视觉系统[A].97北京智能交通系统发展趋势国际学术研讨会论文集[C].1997,97-101.

TP391
A
猜你喜欢
西南石油大学学报(社会科学版)(2022年4期)2022-07-06
西南石油大学学报(社会科学版)(2022年3期)2022-05-31
西南石油大学学报(社会科学版)(2022年2期)2022-04-07
西南石油大学学报(社会科学版)(2022年1期)2022-02-02
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
数学教学通讯·初中版(2015年5期)2015-06-17