
北斗+GPS高性能低噪声放大器的研究与设计
2017-12-27 01:38王丽黎
电子器件 2017年6期
马 杰,王丽黎
(1.华南理工大学物理与光电学院,广州 510641;2.西安理工大学自动化与信息工程学院,西安 710048)
北斗+GPS高性能低噪声放大器的研究与设计
马 杰1,王丽黎2*
(1.华南理工大学物理与光电学院,广州 510641;2.西安理工大学自动化与信息工程学院,西安 710048)
针对国内北斗行业的发展和双模定位的优点以及北斗B1频段和GPS相近的特点,给出了一种适用于北斗B1频段和GPS L1频段的低噪声放大器的设计原理和设计方法,并制作出实物,给出了测试结果。为了达到更好的增益,采用了3级级联的方式。设计出的低噪声放大器的在B1和L1频段内的增益(38±0.5)dB,输入驻波系数小于1.8,输出驻波系数小于1.2,噪声系数小于0.65 dB,在全频段内无条件稳定,可用于北斗B1频段和GPS L1频段。
低噪声放大器;北斗;GPS;噪声系数;级联
双模定位可以充分利用两套卫星定位系统的长处和卫星资源,精度和可靠性更强[1]。本设计适用于北斗和GPS的低噪声放大器将真正实现双频低噪声放大,对于双星定位至关重要。低噪声放大器常用于接收系统的前端,其性能的好坏直接影响了整个系统的性能[2]。对于工程中如果需要低噪声的增益比较大,那么就需要多级放大器级联,多个放大器级联的噪声系数为:
(1)
式中:Nf表示总共的噪声系数,Ni表示第i级的噪声系数,Gi表示第i级的增益[3]。从式(1)中可以看出对整个系统的噪声系数影响比较大的是第1级的噪声系数[4],因此本文的重点设计在第1级,选择的是安华高公司的一种低噪声元器件ATF34143,因考虑到整体尺寸的要求,因此第2级和第3极采用RFMD公司的SPF5043z。本文中设计的LNA的中心频率为1 568 MHz,带宽为20 MHz,适用于北斗一号的B1频段(B1中心频率:1 561.098,带宽4 MHz)和GPS的L1频段(L1中心频率:1 575.42,带宽:2 MHz)。
1 技术指标
低噪声放大器的主要技术指标如下:工作频率为1 558 MHz~1 578 MHz,中心频率为1 568 MHz,要求全频带稳定;增益大于37 dB,平坦度小于0.5 dB;噪声系数<0.65 dB,输入驻波比<1.8,输出驻波比<1.2;介电常数Er=2.65,板材厚度为0.8 mm;外形尺寸大小20 mm×40 mm。
2 系统结构和芯片的选择
设计中对整体的结构布局如图1所示。图1中第1级采用的是安华高公司的低噪声的元器件ATF34143,可以通过Advanced Design System(ADS)对其进行偏置电路的设计、稳定性分析以及输入输出的匹配,第2级和第3极选择了RFMD公司的SPF5043z(是一种集成的低噪声放大器模块,不需要额外的匹配电路),这样就大大节省了电路的尺寸和空间,缩小了尺寸,降低了匹配的灵敏度[5-7]。设计的第2级和第3级之间加入了带通滤波器。

图1 系统结构图
3 低噪声放大器电路的设计和匹配
第1级选用了一种低噪声元器件ATF34143,根据芯片的特点,我们选定了其在3 V、20 mA的工作状态的s2p文件,和TRL校准提取的S参数比对以后进行了稳定性分析以及输入输出端的匹配[8-10],在ADS中导入S2P文件以后对电路做稳定性分析,稳定性要满足的3个条件:

(2)
|S22|2<1-|S12S21|
(3)
|S22|2<1-|S12S21|
(4)
K称为稳定判别系数,K>1是稳定状态。只有当3个条件都满足时看,才能保证放大器是绝对稳定的[11-12]。一般采取稳定性的措施有:(1)引入负反馈,(2)在管子的输入或者输出端口串并联电阻。这两种方法都有效,但是一般在设计中往往采取多种相组合的方式来做稳定。图2是已经做好稳定性的电路,在其输入端口并联了50 Ω的电阻,输出端口串联了一个22 Ω和并联了一个500 Ω的电阻,并加入了负反馈。图3为稳定性曲线,可以看到在0~11 GHz上大于1,都是稳定的,确保了芯片工作在稳定状态。
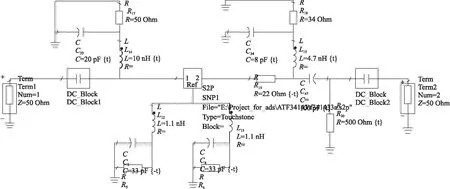
图2 稳定性分析电路
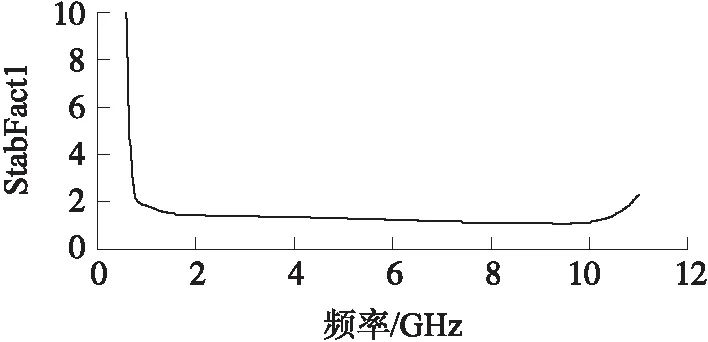
图3 0~11 GHz全频带稳定性曲线图
我们在设计低噪声放大器的时候,既要求得最好的噪声系数,又要求得最大的增益[13]。因此在我们调节整个电路的稳定性的时候,就要考虑到最好增益和最佳噪声系数之间的关系,如图4为等增益圆和等噪声系数的smith圆图[14]。
最佳噪声和增益点的匹配,是低噪声放大器设计的关键,GammaS是源反射系数的最佳值,是从分立元件向源看去的。

图4 等增益和等噪声系数圆的smith圆图
图4中两个圆圈,蓝色代表增益圆,步进为1 dB,蓝色圆点代表着最佳增益点,暗色的为噪声圆,其步进为0.2 dB,其圆心代表着最佳的噪声点。根据Hau’s的理论[15-16],为了获得较好的噪声系数和较好的增益,在设计的过程中尽量使S11和GammaS相接近,图4中m8为BD+GSP的中心频率1 568 MHz的S11所在的点。调整好最佳的源反射系数以后,我们就要对其进行输入输出匹配,匹配的电路如图5所示。仿真的结果如图6、图7所示。
第2级和第3极采用的是RFMD公司的SPF5043z,是一种理论上不需要匹配的集成的低噪声放大器模块,但是实际中可能需要调整,这对于整体的电路设计尺寸来说减少了后两级的匹配网络,大大节省了空间,缩小了整体的尺寸,这对于实际工程应用来说意义重大。SPF5043z的电路如图8所示。
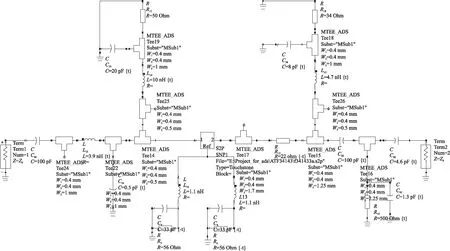
图5 第1级匹配好的原理图
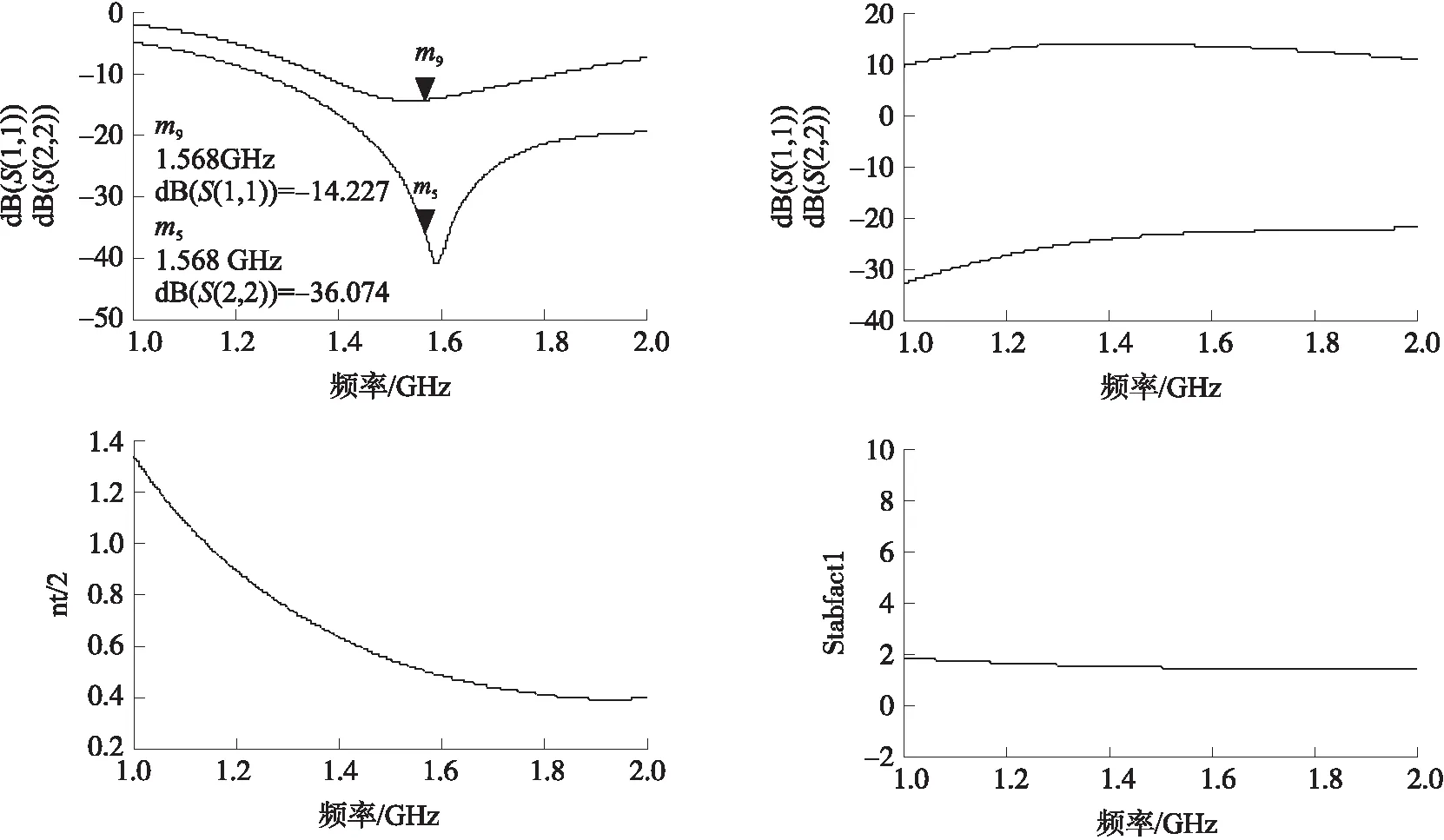
图6 第1级仿真的S参数、噪声系数以及稳定性曲线
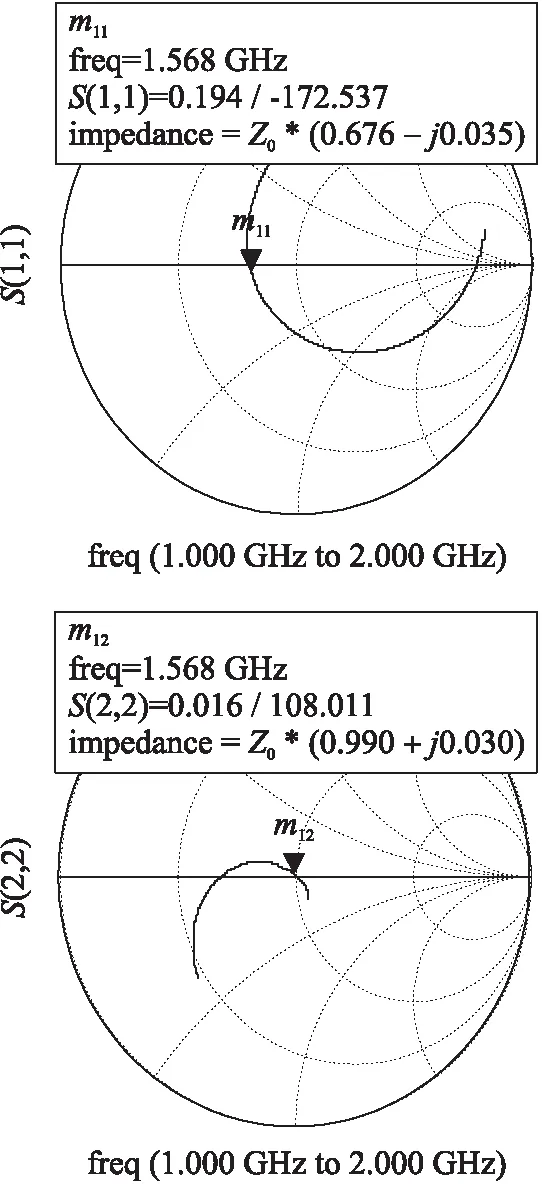
图7 第1级反射系数的smith圆图
4 设计和测试结果
焊接以后的3级BD+GPS低噪声放大器的实物效果如图9所示。
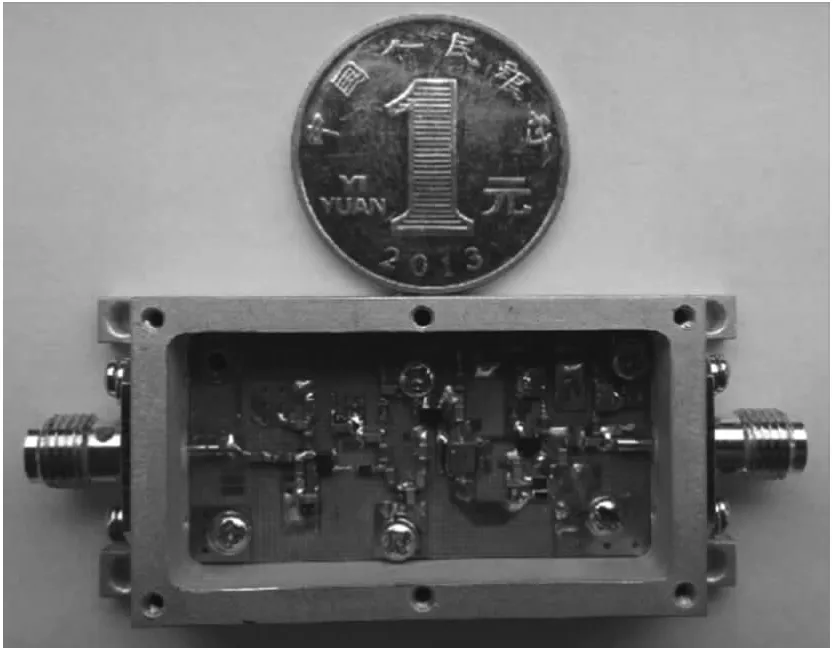
图9 低噪声放大器的实物效果图
低噪声放大器的测量,测量内容主要为S参数和噪声系数,S参数的测量采用Agilent的矢量网络分析仪,测量的结果如图10所示,图10中中心频率为1 568 MHz,Span=200 MHz,包含S11、S21、S12、S22以及输入输出端的smith圆图,输入端口的回波损耗>13 dB,换算以后的输入端口的驻波系数<1.8,输出端口的回波损耗>20 dB,换算以后的输出端口的回波损耗<1.2,增益以及平坦度为(38±0.5)dB,满足设计要求。噪声系数的测量采用Agilent噪声分析仪测试,连接示意图如图11所示,由于低噪声放大器的增益比较大,为保护噪声系数分析仪,在低噪声放大器的输出端口加入了20 dB左右的衰减器,确保其在安全的范围内。最终测定的噪声系数如图12所示,噪声系数在通带内<0.65,比较理想,能够满足较多工程的应用要求。

图12 噪声分析仪测得的噪声系数
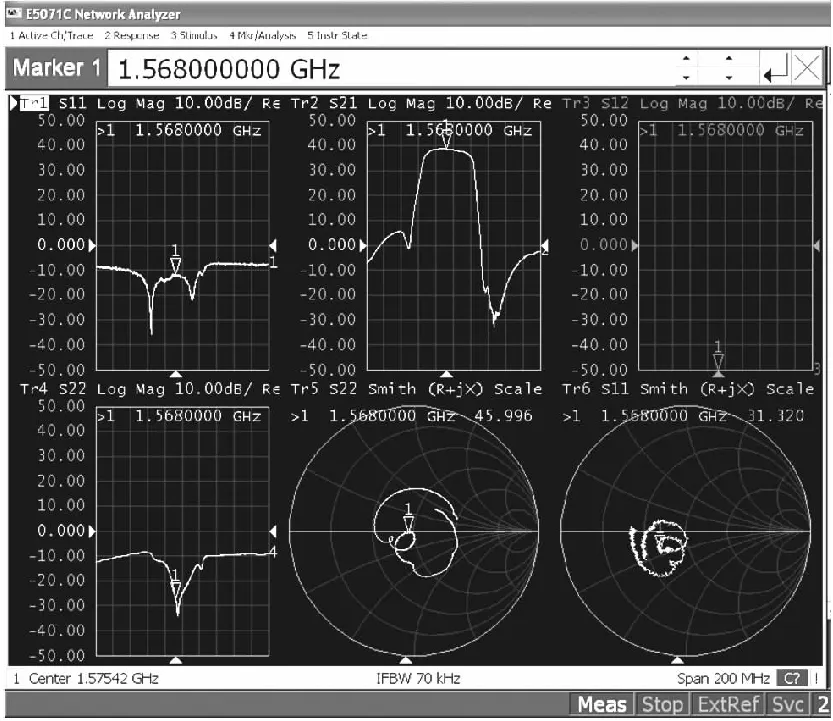
图10 矢量网络分析仪测得的S参数
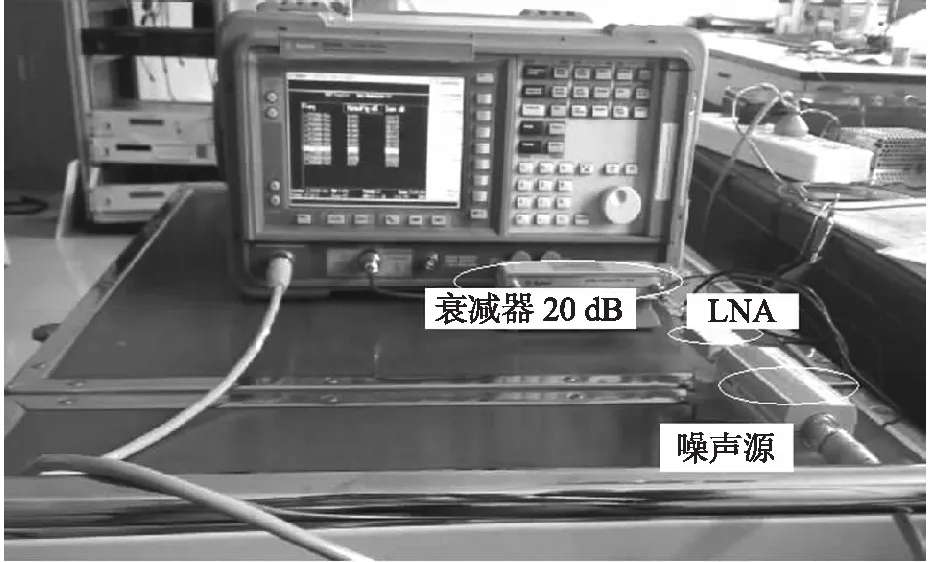
图11 噪声系数测量连接图
5 结论
本文设计出的BD+GPS低噪声放大器的性能参数满足设计要求,性能参数比较理想,其较低的噪声系数和较高的增益以及平坦度,可以应用在信号的接收、转发器、抗干扰等实际工程应用中,具有较好的应用前景。
[1] 史晓强,欧钢. 基于GPS/北斗一号的车辆定位高度系统[J]. 科技信息(学术版),2008(3):355-356,358.
[2] Nam I,Moon H,Woo D H. Low Noise and Highly Linear Wideband CMOS RF Front-End for DVB-H Direct-Conversion Receiver[J]. 2012,E95-B(7):2498-2500.
[3] 徐兴福. ADS2008射频电路设计与仿真实例[Z]. 北京:电子工业出版社,2009:296-299.
[4] Li S,Wu Y,Shi C,et al. Optimizing Mixer Noise Performance:A 2.4 GHz Gibert Downconversion Mixer for W-CDMA Application[C]//Lisboa,1999.
[5] 李思敏,姜兴,苏光杰,等. 嵌入匹配网络的电小天线的优化设计[J]. 电子学报,2002(9):1393-1395.
[6] 汤晓黎,陈晓光,王家诒. 微波电路中匹配网络软件的研制及其应用[J]. 微波学报,2004(3):77-81.
[7] 梁晶晶,沈福贵,逯贵祯. 低噪声放大器的设计与灵敏度分析[J]. 中国传媒大学学报(自然科学版),2012,19(2):64-69.
[8] Engen G F,Hoer C A. Thru-Reflect-Line:An Improved Technique for Calibrating the Dual Six-Port Automatic Network Analyzer[J]. IEEE Transactions on Microwave Theory and Techniques,1979,27(12):987-993.
[9] Diaz Caballero E,Belenguer A,Esteban H,et al. Thru-Reflect-Line Calibration for Substrate Integrated Waveguide Devices with Tapered Microstrip Transitions[J]. Electronics Letters,2013,49(2):132-133.
[10] Stumper U. Uncertainty of VNA S-Parameter Measurement Due to Nonideal TRL Calibration Items[J]. IEEE Transactions on Instrumentation and Measurement,2005,54(2):676-679.
[11] Wu J,Yeh C. A GPS Lna Rfic with Voltage-Controlled Noise and Input Matching[J]. 2012,54(2):332-335.
[12] Lopez A R. Double-Tuned Impedance Matching[J]. 2012,54(2):109-116.
[13] 孟庆斌,黄贵兴,葛付伟,等. 一种低噪放多级匹配网络的设计与仿真[J]. 微波学报,2012(3):61-65.
[14] Missing. Fractional Smith Chart Theory[J]. Microwave and Wireless Components Letters,IEEE,2011,21(3):117-119.
[15] Reinhold Ludwig. RF Circuit Design:Theory and Applications[M]. 北京:电子工业出版社,2002:156-158.
[16] 唐兴刚,龙善丽,刘艳. 高精度低噪声MEMS陀螺仪电容读出电路[J]. 传感技术学报,2014,27(9):1191-1195.
ResearchandDesignofBD+GPSHighPerformanceLowNoiseAmplifier
MAJie1,WANGLili2*
(1.School of Physics and Optoelectronics,South China University of Technology,Guangzhou 510641,China;2.Department of Automation and Information Engineering,Xi’an University of Technology,Xi’an 710048,China)
Aiming at the development of the BD,considering about advantages of dual-mode positioning and similarity of the BD’s B1 band and GPS’s L1 band,a design principle and its working method of a low-noise amplifier are described which is suitable for the BD’s B1 band and GPS’s L1 band,and a physical object is made,which gives the test result. To achieve better gain,it was used three cascaded manner. Finally,the low-noise amplifier designed has a gain of(38±0.5)dB in B1 band and L1 band,the input VSWR is less than 1.8,the output VSWR is less than 1.2,the noise figure is less than 0.65 dB,unconditional stability in the whole band. It can be used for the Beidou B1 band and GPS L1 band.
low noise amplifier;BD;GPS;noise figure;series connection
10.3969/j.issn.1005-9490.2017.06.020
2016-11-15修改日期2017-01-05
TN722.3
A
1005-9490(2017)06-1432-05

马杰(1995-),男,本科,主要研究方向为天线与光电信息科学与工程;
王丽黎(1968-),女,副教授,硕士生导师,主要研究方向为电磁场与微波技术、天线理论与技术。
猜你喜欢
流程工业(2022年3期)2022-06-23
成都信息工程大学学报(2021年4期)2021-11-22
空间科学学报(2021年6期)2021-03-09
数字通信世界(2020年3期)2020-04-06
雷达与对抗(2019年4期)2019-03-10
计算机与数字工程(2019年1期)2019-03-01
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年3期)2016-03-26
中国继续医学教育(2015年3期)2016-01-06
自动化博览(2014年12期)2014-02-28
