蓝牙室内定位自适应算法研究
2017-12-27 18:25:36申云猛邹优敏
苏州科技大学学报(工程技术版) 2017年4期
罗 恒 ,申云猛 , 邹优敏 , 唐 楠 ,于 波
(1.苏州科技大学 电子与信息工程学院,江苏 苏州 215009;2.苏州科技大学 江苏省建筑智慧节能重点实验室,江苏 苏州215009;3.苏州市移动网络技术与应用重点实验室,江苏 苏州215009)
蓝牙室内定位自适应算法研究
罗 恒1,2,3,申云猛1, 邹优敏1, 唐 楠1,于 波1
(1.苏州科技大学 电子与信息工程学院,江苏 苏州 215009;2.苏州科技大学 江苏省建筑智慧节能重点实验室,江苏 苏州215009;3.苏州市移动网络技术与应用重点实验室,江苏 苏州215009)
建筑物结构等因素导致全球定位系统GPS在室内定位精度急剧下降。针对复杂室内环境,提出一种基于线性规划的电磁波自由传播衰减自适应模型,提高室内蓝牙定位系统的精度。通过高斯滤波优化RSSI值校准基准信号,运用线性规划方法动态预测环境衰减系数,进而获取精确的目标节点距离。实验结果表明,在复杂室内环境下,当节点与参考节点距离小于1.5 m时,绝对误差不大于0.25 m;当距离大于1.5 m,相对误差小于7.8%,可满足室内定位的需求。
室内定位;蓝牙定位;线性规划;自适应
全球定位系统GPS(Global Positioning System,GPS)[1]的产生及发展,为人们提供了在室外空间中获得特定物体精确位置的可能,目前,GPS 已经在军事[2]、资源[3]、交通[4]、农牧渔业[5]、环境[6]、测绘[7]等领域获得了非常广泛应用。但是,面对复杂的室内环境,GPS定位精确度却急剧下降[8],不能很好地满足定位需求。
相关统计结果表明,人类有90%以上的时间在室内度过[9]。由于室内空间复杂度高,室内定位困难重重。如在博物馆、超市、机场等场所[10],消费者需快速了解自身所处位置,并到达目的地;在矿井、火灾等现场[11],救援及工作人员也需要获取被困者的精确位置。室内定位的需求前所未有地高涨,使得室内定位的市场也逐步扩大。
面对室内定位需求的增加以及GPS室内定位性能的急剧恶化,业界和学界提出了一系列的解决方案,其核心主要依赖WiFi、RFID和蓝牙等技术[12]。WiFi具备规模大、覆盖范围广的优点,不足主要表现在功耗较大,应用成本较高;RFID定位技术具有快速精确定位、传输范围较大、成本亦较低等优点,与移动设备的有效整合一直是RFID的一大缺点[13]。蓝牙定位具有成本低、功耗低的优点,与现有移动终端融合程度也较好,但是,其定位精度和系统稳定性却存在一些不足[14]。
针对蓝牙定位系统在室内复杂环境下定位精度不足的问题,陶为戈团队[15]提出了一种基于最小二乘法估算环境参数的算法,优化了信号的传播模型,取得了较好的效果。文章从线性规划的角度提出了一种电磁波自由传播衰减自适应模型,通过自适应调整电磁波自由空间模型,实现较为精确的室内定位。
1 电磁波传播优化模型
1.1 传统自由空间电磁波传播模型
在理想自由空间中,电磁波传播符合[15]:

其中,p(d)、p(d0)分别表示蓝牙基站 d、d0处的信号强度,单位均为 dBm;n表示无线信道衰减系数,取值仅与环境因素相关,表1所示为不同环境中n的经典取值;ζ表示噪声,取值服从均值为零的高斯分布。

表1 衰减系数n的几个经典值
若令 p(d0)为一个固定值,即 p(d0)=A,则式(1)可简化为

其中,RSSI为实测点信号强度,由式(2)可得:

1.2 电磁波传播模型优化
在实际应用中,A和n通常用固定值来表示,以降低计算复杂度。由于环境因素相对恒定,这一假设在简单的室内环境下具有一定合理性。然而在复杂的室内环境下,障碍物、电子设备的电气特性使得电磁波传播呈现出明显的时变特性,其结果是定位精度大幅度下降,不能很好的满足应用需求。
1.2.1 基准信号A优化
基准信号强度A是定位模型中的一个重要参量,直接关系到定位精度,通常取d0m处的平均值作为参考值。当样本空间足够大时,信号强度RSSI可以通过样本的数学平均获取,当样本空间有限时,数学平均的方法会产生较大误差。
由于任意处的RSSI均服从(μ,σ2)的高斯分布,即d0处概率密度函数为:

其中,RSSId0,i表示d0处j个信号强度中的第i个信号强度。
区间(μ-σ≤RSSId0≤μ+σ)的概率为

根据式(5)计算得 P(μ-σ≤RSSId0<μ+σ)=0.682 6,所以,区间(μ-σ,μ+σ)为高概率发生区。
因此,高斯滤波后可获得较高置信区间的信号强度RSSI,对该区间内的信号强度作数学平均,作为基准信号强度,即

其中,β表示d0处经过高斯滤波后的信号强度的个数,RSSId0,k表示d0处β个信号强度中的第k个信号强度。
1.2.2 衰减系数n优化
选定l个锚节点,令锚节点到参考节点M的距离分别为d1,d2,d3,……,dl,由于所有节点都处于同一环境之中,假设它们具有相同的信号传输特性,根据

可获取 n,其中,Δdn表示衰减系数为 n 时,估算距离与真实距离 dm,n(m=1,2,…,l)误差的值,即

其中,RSSIi表示实际距离 di处的信号强度;αm(m=1,2,…,l)为 Δdm,n(m=1,2,…,l)的系数。 基于线性规划的方法,得到Δdn最小值,此时的n值即为当前环境的最优化衰减系数。
2 实验结果分析
2.1 测试环境及参数设置
图1为实际测试环境。由图1可见,实验室存在桌椅等障碍物,中间有一台大型实验设备,将实验室隔开。表2为实验设备设置参数,其中,蓝牙的发射功率为1 mW;每隔0.1 m采集一组数据,每组包含2 000个RSSI值。基站与障碍物表面距离为1 m,可以模拟手持移动设备实际高度,同时降低地面震动对结果影响。

图1 实验室环境

表2 实验参数设置
2.2 结果及分析
图2所示为根据式(8)调整基准信号A,由式(10)得到的估算距离与实测距离的绝对值误差和相对误差。由图可见,在使用基准信号优化模型后,当实际距离小于1.5 m时,误差较小(在0.25 m以内),但是相对误差较大(在16%以下);当距离大于1.5 m时,绝对误差和相对误差呈线性增长,无论绝对值与相对值都较大。
图3所示为根据式(9)自适应调整衰减系数n,由式(10)得到的估算距离与实测距离的绝对值误差和相对误差。由图可见,在使用衰减系数优化模型后,当实际距离小于1.5 m时,绝对误差较大(在0.52 m以内),相对误差也较大,在45%以上;当距离大于1.5 m时,绝对误差小于0.5 m,其相对误差在保持在10%以下。
由图2和图3可知,当实际距离1.5 m时,基准信号优化模型效果明显;当距离大于1.5 m时,衰减系数优化模型效果突出。基于此,可得到综合优化模型
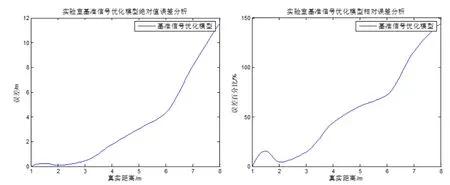
图2 基准信号A优化

图3 衰减系数n优化

其中,当实际距离1.5 m时,使用基准信号优化模型;当距离大于1.5 m时,使用衰减系数优化模型。
图4所示为使用综合模型后的绝对误差和相对误差,由图可见,当距离小于1.5 m时,相对误差最大值为15.6%;当距离大于1.5 m时,相对误差最大值为7.8%。总体而言,系统相对误差小于16%。
3 结论
文章提出了一种基于线性规划的电磁波自由传播衰减自适应综合模型。实验结果表明,在复杂室内环境下,测量结果与估算距离相对误差小于16%,可较好地满足室内定位的需求。该方法立足于二维定位算法的实现与优化,成果可以为三维定位奠定良好的基础,是实现高精度三维定位的重要前提,具有重要的理论与现实意义。

图4 综合优化
[1]RAJARAM M L,KOUGIANOS E,MOHANTY S P,et al.Wireless sensor network simulation frameworks:A tutorial review[J].IEEE Consumer Electronics Magazine,2016,6(2):63-69.
[2]BANA S,BAGHLA S.Wireless sensor network[J].International Journal of Engineering Science,2016:1706.
[3]PARK J,YONG K C,MARTINEZ D.A BIM and UWB integrated mobile robot navigation system for indoor position tracking Applications[J].Journal of Construction Engineering and Project Management,2016,6(2):30-39.
[4]TAHAT A,KADDOUM G,YOUSEFI S,et al.A look at the recent wireless positioning techniques with a focus on algorithms for moving receivers[J].IEEE Access,2016,4:6652-6680.
[5]侯启真,史秉鑫,刘衍帆.基于RSSI的ZigBee定位技术研究[J].计算机应用与软件,2016,33(4):134-137.
[6]GU Y,REN F.Energy-Efficient indoor localization of smart hand-held devices using bluetooth[J].IEEE Access,2015,3:1450-1461.
[7]TSANG PYP,WU CH,IP WH,et al.A Bluetooth-based indoor positioning system:a simple and rapid approach[J].Accounting Today,2015,35(10):11-26.
[8]黄海辉,李龙连.WSN中一种基于RSSI的移动节点改进定位算法[J].电子技术应用,2015,41(1):86-89.
[9]张苍松,郭军,崔娇,等.基于RSSI的室内定位算法优化技术[J].计算机工程与应用,2015,51(3):235-238.
[10]GU Y,ZHANG J,WANG J,et al.RFID indoor localization algorithm based on adaptive self-correction[J].International Journal of Smart Home,2014,8(6):205-216.
[11]SU B,WU C,WANG H.Application of improved dynamic RSSI algorithm in wife indoor positioning[J].Sensors&Transducers,2014,168(4):216-222.
[12]吴绍春,陈亮.基于RSSI的矿山井下人员定位方法研究[J].计算机应用与软件,2015,32(10):116-119.
[13]李丽娜,马俊,徐攀峰,等.RFID室内定位技术研究综述[J].计算机应用与软件,2015,32(9):1-3,96.
[14]BINGBING Y,WENBO R,BOLIN Y,et al.An indoor positioning algorithm and its experiment research based on RFID[J].International Journal on Smart Sensing&Intelligent Systems,2014,7(2):879-897.
[15]陶为戈,朱昳华,贾子彦.基于RSSI混合滤波和最小二乘参数估计的测距算法[J].传感技术学报,2012,25(12):1748-1753.
An adaptive indoor positioning system based on bluetooth
LUO Heng1,2,3,SHEN Yunmeng3, ZOU Youmin3, TANG Nan3, YU Bo3
(1.School of Electronic and Information Engineering,SUST,Suzhou 215009,China;2.Jiangsu Key Laboratory of Intelligent Building Energy Efficiency,Suzhou 215009,China;3.Jiangsu Province Building Intelligent Energysaving Key Laboratory,SUST,Suzhou 215009,China)
Building structure and other factors lead to the performance deterioration of GPS indoor positioning system.An adaptive model of electromagnetic wave free propagation attenuation is proposed to improve the bluetooth positioning performance in the complex indoor environment.The optimization of calibration of RSSI by Gaussian filter,together with dynamic prediction of attenuation coefficient,is used to obtain the accurate distance between the nodes.Experimental results show that when the absolute distance difference between reference node and actual node is not far from 1.5 meters,the absolute error is less than 0.25 meters,and when the absolute distance difference is more than 1.5 meters,the relative distance difference is less than 7.8%in the complex indoor environment.
indoor positioning;bluetooth positioning;linear programming;adaptive
卢文君)
TP393
A
2096-3270(2017)04-0076-05
2017-07-27
国家自然科学基金项目 (61602334;61502329;61401297);住房与城乡建设部科学技术项目 (2015-K1-047);江苏省自然科学基金项目(BK20140283)
罗 恒(1981-),男,江苏苏州人,讲师,博士,主要从事人工智能及其应用的研究。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
无损检测(2018年11期)2018-11-28 08:27:42
电子测试(2018年9期)2018-06-26 06:45:36
现代园艺(2018年2期)2018-03-15 08:00:41
现代测绘(2018年1期)2018-03-06 05:16:16
现代测绘(2018年5期)2018-02-18 19:06:45
现代园艺(2017年21期)2018-01-03 06:42:07
长江大学学报(自科版)(2017年19期)2017-10-14 02:03:20
测绘通报(2016年9期)2016-12-15 01:56:16
中国测试(2016年3期)2016-10-17 08:54:04