基于模糊PI控制的电池储能系统低电压穿越控制策略
2017-12-26 02:17:20何海平
分布式能源 2017年6期
何海平
(国网安徽省电力公司滁州供电公司,安徽 滁州 239000)
基于模糊PI控制的电池储能系统低电压穿越控制策略
何海平
(国网安徽省电力公司滁州供电公司,安徽 滁州 239000)
电网导则要求并网风电机组在电网电压在一定范围内瞬间跌落时不脱网运行。为满足这一要求,提出了一种基于电池储能的低电压穿越控制策略。该方法通过PQ解耦PI控制策略,调节交流侧输出的幅值和相位,以提供满足系统电压稳定的无功功率,使系统具有低电压穿越能力。并针对传统PI控制动态响应差等特点,采用模糊PI控制,结果表明模糊PI控制较传统PI控制响应快、跟踪误差小,并能使系统在故障发生后更快地恢复稳定运行。
风电场;电池储能系统;低电压穿越;模糊PI控制
0 引言
由于风电具有节约电力系统运行成本、无污染等优点,近年来在许多国家得到了快速发展。随着大规模风电并网,风电系统在电网故障情况下的运行变得尤为重要,电网导则要求风电机组在电网电压跌落期间应具备低电压穿越能力。
目前,风力发电机组低电压穿越问题已成为国内外研究热点,实现低电压穿越主要有2种方法:一种是改进变流器的控制策略;另一种是通过增加硬件控制电路来实现。文献[1]建立了计及定子绕组动态过程的双馈风力发电机(doubly fed induction generator, DFIG)的精确数学模型,在改进的矢量控制策略的基础上进行了双馈风力发电机的低电压穿越仿真研究。文献[2]从限制电网故障时的定子工频过电流的角度出发,有效限制了由定子工频过电流分量引起的转子电流交流分量,实现了故障时避免转子出现过电流的目的。从软件方面来实现低电压穿越只适用于电压小幅跌落情况,当电网发生严重故障情况下,单靠改进变流器控制策略的方法很难实现低电压穿越,必须增加硬件控制电路。文献[3]从机组安全约束和系统区域电压稳定角度出发,探讨了DFIG的撬棒(crowbar)保护电阻取值和投切控制策略。而作为硬件控制电路之一的储能系统通过控制电压跌落期间的变流器直流侧电压,将故障期间多余的能量储存起来以弥补故障结束时的能量不足,从而维持直流电压的稳定,但该系统无法有效控制转子电流,并且对变流器绝缘栅双极型晶体管(insulated gate bipolar transistor, IGBT)额定容量也带来严重考验[4-5]。
作为可灵活调节的电池储能系统既能平滑风电功率输出,又能有效提高风电机组的低电压穿越能力。目前对电池储能系统的研究主要包括平滑控制、调峰以及容量配置方面[6-7],随着电池储能系统在风电场中的广泛应用,与之相关风电机组的低电压穿越的研究还未涉及到。本文提出基于一种基于电池储能的低电压穿越控制策略,并针对传统PI控制动态响应差等特点,提出模糊PI控制策略。
1 电池储能系统基本结构
电池储能系统主要由锂电池系统、DC/DC双向斩波电路、AC/DC双向变流器、控制装置和变压器组成。图1为电池储能系统的主电路结构图。

图1 电池储能系统的结构Fig.1 Structure of battery energy storage system
DC/DC双向斩波电路、AC/DC双向变流器结构均由IGBT自关断能力较强的全控型器件组成,这种器件可以快速有效地保证电池储能系统在电网故障时持续为电网提供无功功率以支持并网点电压,当故障切除后,该系统能继续维持正常运行。
图1中,AC/DC变流器可实现交流系统与锂电池系统之间能量的双向流动。其中,R、L为变压器等效电阻、电感;C为直流侧的平波电容;Usa、Usb、Usc为公共连接点(point of common coupling, PCC)的三相相电压;Ua、Ub、Uc为AC/DC变流器输出端的三相相电压;ia、ib、ic为AC/DC变流器输出端的三相线电流;Udc为直流侧平波电容两端电压;Rs、Us为电池的等效电阻和端电压;Idc为电池输出端电流。
2 基于电池储能的低电压穿越控制策略
电池储能系统具有动态吸收能量并适时释放的特点,能有效弥补风电的间歇性、波动性缺点,改善风电场输出功率的可控性。此外,电池储能系统的合理配置还能有效增强风电场的低电压穿越功能。现有的关于低电压穿越控制方法,多是通过风力发电机组的变流器控制完成,而没有提出电池储能系统来改善低电压穿越控制方法。
目前,三产融合尚处于探索阶段,很多地方还处于一二三产业简单共存状态,即一部分农民在从事农业生产活动的同时,也让家里人开着农家乐,但是却各干各的,没有实现真正融合。换句话说,就是不论单一的农业生产还是以农家乐为主的农村观光旅游,都还没有真正发挥农业的应有功能。所以,三产融合必须深入持久地进行下去。
AC/DC变流器采用能量双向流动的四象限运行的电压源型逆变器,通过PQ解耦PI控制策略,适当地调节交流侧输出的幅值和相位,就可以使该电路吸收或者发出满足系统需求的有功和无功电流,最终实现交流系统与锂电池系统之间能量的双向流动。当系统电压不稳时,电池储能系统根据并网点电压的变化情况动态地控制无功功率输出,提供满足系统稳定的无功电流,这会对故障期间电网电压恢复起到一定的支撑作用,从而实现低电压穿越能力。
由图1电路结构并采用dq0变换,得到dq同步旋转坐标系下(d轴与交流系统电压矢量重合,q轴超前d轴90°)交流侧的电流:
(1)
式中:ωs为电池储能系统角频率,id、iq、Ud、Uq、Usd、Usq分别为ia、ib、ic、Ua、Ub、Uc、Usa、Usb、Usc的dq分量。直流侧电流为

(2)

(3)
由文献[8]可知,当三相桥式逆变器工作于脉宽调制(pulse width modulation, PWM)方式时,AC/DC变流器输出电压表示为
(4)
式中:A为占空比;α为变流器交流侧电压相位角。
静态时,锂电池和变流器之间不进行有功功率的交换,由(3)线性化得到:
(5)
(6)


图2 基于电池储能的低电压穿越控制策略Fig.2 Control strategy of low voltage ride through based on battery energy storage
(7)
式中:idref=Pref/U,Pref为电池输出有功参考值,U为AC/DC变流器交流侧电压有效值;k1、k2为PI控制器中比例积分参数。iqref为无功控制量,其反映的是电池储能系统向系统传输或者吸收的无功功率,当系统出现故障时,系统电压不稳,此时电池储能系统根据并网点电压(Upcc)变化情况动态地控制无功输出情况,即控制并网点电压跟踪在PCC点电压初始设定值Uref,进而通过控制交流侧输出幅值和相位,提供满足系统稳定的无功电流以满足系统低电压穿越控制要求。其控制框图如图2所示。
为了控制方便,本文采用基于调制波与三角载波信号比较的PWM方法。用上述PQ参考值作为输入控制参考量,通过PI控制器得到正弦调制波的幅值和相位,即确定正弦调制信号,再用三角载波信号与之相比得到了AC/DC变流器控制开关信号,该调制波的频率ω与电池储能系统角频率ωs相等。该PI控制器采用的是传统的PI控制器,由于其参数固定,在控制系统整个运行范围内遇有参数变化或扰动时会导致动态性能下降。
3 传统PI控制器改进
基于电池储能的低电压穿越控制系统中采用了传统PI控制,使得PQ控制参考量响应慢,动态性能差等特点。本文将模糊控制增加到传统PI控制中,通过仿真说明电池储能系统在提高系统低电压穿越能力方面的不足。
模糊控制是由模糊集合、模糊语言变量和模糊规则推理为基础的智能控制方法。模糊PI控制器是由模糊控制器不断检测误差e及其变化率ec,根据e和ec的大小和模糊逻辑推理,修正PI控制器参数Kp、Ki,从而具有一定的参数在线调整能力,使被控对象具有良好的动、静态性能。

图3 模糊PI控制系统结构Fig.3 Architecture of fuzzy PI control system
应用于电池储能系统低电压穿越控制中的模糊PI控制系统结构如图3所示。下面以电压调节为例说明该控制系统结构,当PCC点电压受到扰动时,这时必然会产生误差e,经过模糊控制器产生PI参数调节增量ΔKp、ΔKi,PI调节器参数增量ΔKp、ΔKi由模糊控制器计算出,并根据式(7)整定PI参数输出值。模糊控制器输入及输出均采用三角形隶属函数[8],建立模糊规则。通过该层PI控制器电池发出无功电流以提供满足系统稳定的无功功率。同样有功电流idref和无功电流iqref也类似增加模糊控制。
(7)
4 仿真分析
为了验证所提出控制策略正确性和有效性,本文在PSCAD软件中进行了仿真研究,仿真系统如图2所示,主要参数如下:输入风速为某风场冬季48 h实际风速,DFIG风力发电机额定功率2 MW,取电池额定容量为500 A·h,额定电压为0.625 kV,两级变压器之间的线路等值阻抗Z1=0.1 Ω,变压器T2至电网的传输线路Z2等效阻抗为(1.62+j3.16) Ω,等值系统采用100 MVA的单机系统。
4.1 基于电池储能的低电压穿越控制策略
4.1.1 传统PI控制器
基于第2节控制策略,通过改变有功电流参考值idref和无功电流参考值iqref来分析电池储能系统运行状态并研究和验证基于电池储能的低电压穿越控制策略有效性。

图4 有功、无功电流动态响应Fig.4 Dynamic response of active and reactive current
电池储能系统控制有功、无功电流初始参考值分别0.8、-0.2 kA,在1 s时刻突变为0.3、0.3 kA,而后又在2 s时刻变为-0.3、0.8 kA。图4表明该模型的功率控制响应良好,且控制跟踪误差较小,基本达到控制要求。当有功电流大于0时,通过变流器控制使电池储能系统向电网输送有功功率,相当于储能系统放电;当有功电流小于0时,此时通过变流器控制使电网向电池储能系统传送功率,相当于对储能系统充电;图4中无功电流在1 s前为-0.2 kA,说明此时电网从储能系统吸收无功功率。图中,1 s时刻,有功、无功电流突变,其响应时间为0.1 s;2 s时刻,电池储能系统有功电流参考值变为-0.3 kA,同时释放无功功率,而此时变流器控制响应时间约为0.15 s,响应时间较长。
4.1.2 低电压穿越的仿真分析
在图2所示系统中,设母线B处发生三相对称短路,故障持续时间0.5 s,故障跌落深度为30%。图5(a)为公共连接点电压标幺值(Upcc);图5(b)为双馈感应风力发电机定、转子A相电流标幺值(isa、ira);图6(c)为增加电池储能(battery energy storage station, BESS)控制系统下电池储能系统给电网输送无功功率。电网故障时,风电场在没有BESS控制时,PCC点电压迅速跌落至0.7 pu,由此造成DFIG定转子电流增大,给变流器带来很大冲击;当增加BESS控制系统时,电池储能系统马上响应补偿无功以支撑公共连接点电压稳定,如图6(a)(c)所示,由于系统电压恢复,DFIG定转子电流也作出反应被控制在期望的范围内,定子电流上升幅度低于2倍额定值,转子电流基本控制在初始值,如图6(b)所示。增加BESS控制系统使得系统能及时回复至初始值,风电场实现了低电压穿越,系统恢复了稳定。
4.2 模糊PI控制在电池储能系统低电压穿越控制中的应用

图5 无BESS下PCC点电压、DFIG定转子的动态响应Fig.5 Dynamic response of DFIG stator and rotor and PCC voltage without BESS

图6 有BESS下PCC点电压、DFIG定转子的动态响应Fig.6 Dynamic response of DFIG stator and rotor and PCC voltage with BESS
将模糊控制加入到传统PI控制中,以形成如图3所示的模糊PI控制器,将PSCAD与Matlab/Simulink互联,并与传统PI控制方法进行比较分析。
实现电池储能系统有效安全平稳并网前提是AC/DC双向变流器系统控制智能,即被控制量能迅速平稳控制在范围内,误差小、超调量小。本文选定电池储能系统被控制量有功功率和无功功率与参考值之间的误差作为衡量电池储能控制系统优劣的指标,并基此研究电池储能系统改善系统低电压穿越功能。
4.2.1 PI控制器的改进
在4.1.2节基础上,传统PI控制与模糊PI控制下,改变有功电流参考值idref和无功电流参考值iqref来分析电池储能系统有功、无功电流跟踪情况。图7为传统PI控制、模糊PI控制下有功、无功电流跟踪参考值的动态响应曲线。由图7(b)可知,1 s、2 s时刻,有功、无功电流突变,与图4相比响应时间缩短。
从图7可以看出,传统PI控制基本满足并网控制要求,跟踪误差小响应时间长。模糊PI控制动态响应较为迅速,较之传统PI控制能更快地达到并网要求;并且有功、无功电流跟踪响应时间均缩短,且超调量较小,控制效果优于传统PI控制。
4.2.2 低电压穿越效果改进
相同的故障类型下,研究电池储能系统改善风电系统低电压穿越功能,在上述2种PI控制器下,电池储能系统改善系统低电压穿越情况,以及分析双馈感应风力发电机定、转子电流响应情况。
电网故障时由于机端电压跌落导致DFIG定转子电流上升,由此可能引起变流器故障,给风电并网运行带来危险。当增加低电压穿越控制策略之后,机端电压能在故障发生和恢复短时内恢复至初始值并稳定运行,由于电池储能系统马上响应机端故障补偿无功以支撑公共连接点电压稳定(见图6(a)(c)),图8为2种控制器下并网点电压与参考电压误差图,该误差可用Ue=|Upcc-Uref|表示。由图8可以看出,模糊PI控制较传统PI控制能使系统在故障发生和恢复能更快地回复至初始值并稳定运行,并且故障发生和恢复时的波动尖峰减小,此时DFIG定转子电流也被控制在预期范围内,如图9所示。
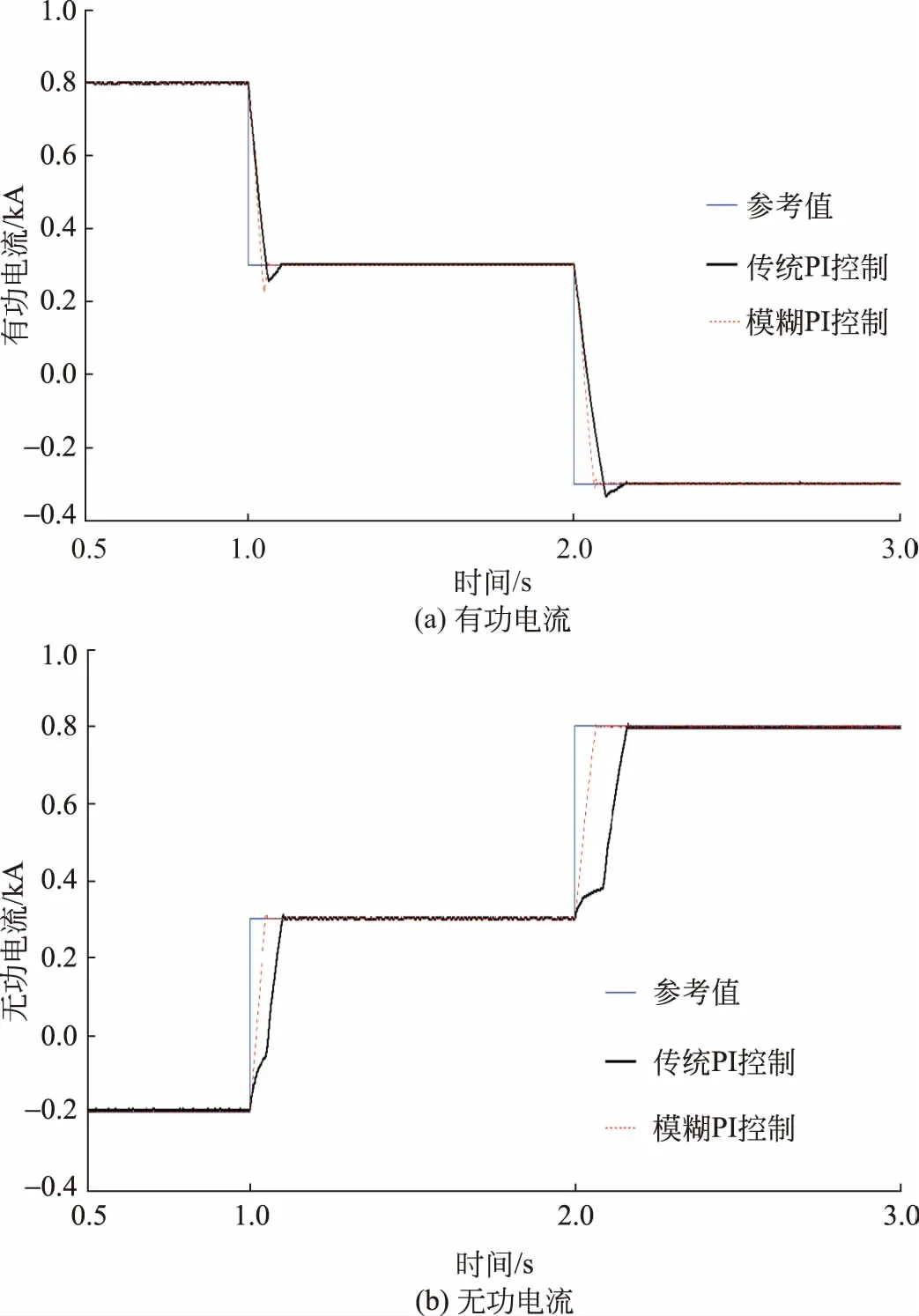
图7 有功、无功电流动态响应Fig.7 Dynamic response of active and reactive current

图8 2种控制器下并网点电压及电压误差Fig.8 Voltage error of network through these two controllers
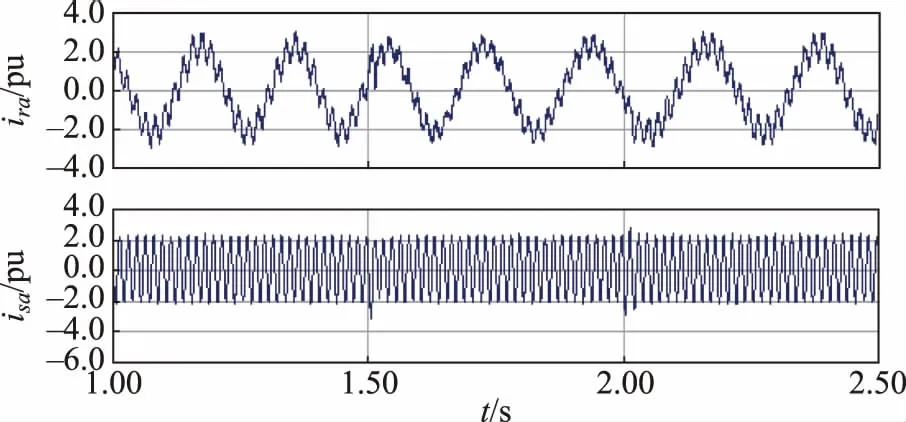
图9 DFIG定转子A相电流Fig.9 A phase current of DFIG stator and rotor
5 结论
(1) 增加储能系统能明显改善风电系统低电压穿越能力,并能有效降低系统故障给双馈风机定转子电流带来的冲击。
(2) 模糊PI控制较传统PI控制动态响应快,其控制响应时间缩短近一半,超调量减小。
(3) 在改善低电压穿越效果时,模糊PI控制较传统PI控制,能使系统在故障发生和恢复能更快地回复至初始值并稳定运行,并且故障发生和恢复时的波动尖峰减小。
[1] 胡家兵, 孙丹, 贺益康, 等.电网电压骤降故障下双馈风力发电机建模与控制[J]. 电力系统自动化, 2006, 30(8): 21-26.
HU Jiabing, SUN Dan, HE Yikang, et al. Modeling and control of DFIG wind energy generation system under grid voltage dip[J]. Automation of Electric Power Systems, 2006, 30(8): 21-26.
[2] 姚骏, 廖勇, 唐建平.电网短路故障时交流励磁风力发电机不脱网运行的励磁控制策略[J]. 中国电机工程学报, 2007, 27(30): 64-71.
YAO Jun, LIAO Yong, TANG Jianping. Ride-through control strategy of AC excited wind-power generator for grid short-circuit fault[J]. Proceedings of the CSEE, 2007, 27(30): 64-71.
[3] 徐殿国, 王伟, 陈宁. 基于撬棒保护的双馈电机风电场低电压穿越动态特性分析[J]. 中国电机工程学报, 2010, 30(22): 29-36.
XU Dianguo, WANG Wei, CHEN Ning. Dynamic characteristic analysis of doubly-fed induction generator low voltage ride-through based on crowbar protection[J]. Proceedings of the CSEE, 2010, 30(22): 29-36.
[4] 侯世英, 房勇, 曾建兴, 等. 应用超级电容提高风电系统低电压穿越能力[J]. 电机与控制学报, 2010, 14(5): 26-31.
HOU Shiying, FANG Yong, ZENG Jianxing,et al. Application of super capacitors low voltage ride to improve wind power system’s through capability[J]. Electric Machines and Control, 2010, 14(5): 26-31.
[5] JIN C, WANG P. Enhancement of low voltage ride-through capability for wind turbine driven DFIG with active crowbar and battery energy storage system[C]//Power and Energy Society General Meeting. IEEE, 2010: 1-8.
[6] 梁亮, 李建林, 惠东. 大型风电场用储能装置容量的优化配置[J]. 高电压技术, 2011, 37(4): 930-936.
LIANG Liang, LI Jianlin, HUI Dong. Optimization configuration for capacity of energy storage system in large-scale wind farm[J]. High Voltage Engineering, 2011, 37(4): 930-936.
[7] OUDALOV A, CHERKAOUI R, BEGUIN A. Sizing and optimal operation of battery energy storage system for peak
shaving application[C]//Power Tech, 2007 IEEE Lausanne. IEEE, 2008: 621-625.
[8] 陈炜, 肖丹, 王慧敏, 等. 双馈风力发电系统空载并网模糊PI控制[J]. 太阳能学报, 2009, 30(6): 794-797.
CHEN Wei, XIAO Dan, WANG Huimin, et al. Fuzzy PI controller for no-load cutting-in control of doubly fed induction generator in wind power system[J]. Acta Energiae Solaris Sinica, 2009, 30(6): 794-797.
LowVoltageRideThroughControlStrategyofBatteryEnergyStorageSystemBasedonFuzzyPIControl
HE Haiping
(Chuzhou Power Supply Company of State Grid Anhui Electric Power Co., Ltd., Chuzhou 239000, Anhui Province, China)
Grid requirements and guidelines for wind turbine does not run off-grid when grid voltage falls within a certain range instantly. To meet this requirement, this paper propose a low voltage ride through control strategy based on battery energy storage. This method decouples PI control strategy through PQ, and appropriately adjusts the amplitude and phase of the AC output side to provide reactive power to meet the system voltage stability, which makes the system has low voltage ride through capability. According to the poor dynamic response characteristics of traditional PI control, this paper uses fuzzy PI control. The results show that compared with traditional PI control, fuzzy PI control has fast response, small tracking error and can enable the system to resume stable operation more quickly after failure.
wind farm; battery energy storage system; low voltage ride through; fuzzy PI control
TK 02;TM 71
A
2096-2185(2017)06-0059-07
10.16513/j.cnki.10-1427/tk.2017.06.010

何海平
何海平(1986—)男,硕士,工程师,主要研究方向为储能技术在电力系统方面的应用。
2017-09-25
(编辑 蒋毅恒)
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
电子制作(2017年1期)2017-05-17 03:54:27
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年9期)2015-04-09 11:59:38
电测与仪表(2014年7期)2014-04-04 12:09:30