
基于Stm32中小功率永磁同步电机矢量控制系统研制
2017-12-25 01:11杨俊翔蒋林李坤刘梁鸿
电动工具 2017年6期
杨俊翔,蒋林,李坤,刘梁鸿
( 西南石油大学电气信息学院,四川 成都 610500 )
基于Stm32中小功率永磁同步电机矢量控制系统研制
杨俊翔,蒋林,李坤,刘梁鸿
( 西南石油大学电气信息学院,四川 成都 610500 )
针对目前中小功率永磁同步电机控制器存在通用性不强,性价比不理想及控制精度欠缺的不足,提出一种基于Stm32的永磁同步电机矢量变频控制器,应用于中小功率永磁同步电机。控制器采用了磁场定向算法,分析了异步电机与同步电机的控制数字系统控制环路上的异同,实现了一套代码能同时适用两种电机的控制,并能在有无传感器方式下运行。适合用户不同的应用场合与需求,高性价比的Stm32微处理器使系统精度提高且成本得以下降,符合技术先进性与经济实用性要求。通过理论分析与实验验证,证明了该策略的可行性。
永磁同步电机;矢量控制;无速度传感器;恒压频比调速
0 引言
随着交流电机在电力拖动领域使用的日益广泛,对交流电机控制器适用性的要求也不断提高。传统的电机控制器需要对电机进行区分,永磁同步电机和异步电机存在控制策略上的差别,与之配合使用的转速反馈传感器增加了系统成本的维护困难,控制器通用性难以得到提高。为解决上述问题,提出一种以Stm32为控制核心,以IRF-N型MOS管和IR系列电桥驱动器、编码器接口、串行通信口、电流传感器搭建的通用交流电机控制器,该控制器核心策略能驱动永磁同步电机与异步感应电机,支持电机在有传感器和无传感器模式下运行。无传感器方式通过估算电机反电势,设计采用滑模完成实时转速的计算。永磁同步电机电压型逆变策略SVPWM的输出为恒磁链追踪控制,逆变器输出磁链矢量为参考圆,该方法同样能驱动交流异步电机,通过程序实现按需调用,可在对永磁同步电机控制的基础上增加对异步电机进行恒磁链控制的功能。
1 调速理论
根据电机理论,转子结构差异致其二者对应的电枢反应不同,造成了控制方式上的不一致,使交流电机在种类上区分为同步与异步,本质都是通过改变电源的供电频率、相位和幅值达到对电机的控制目的。

式中 n—电机同步转速
f—为供电频率
p—电机极对数

式中 φf—永磁体磁链
Ld—直轴电感
Lq—交轴电感
2 软件设计
通过对交流电机调速理论及其数字化实现进行分析和研究,对电机控制程序采用软件查询机制进行控制。
2.1 系统及模块初始化
程序主循环前,需对系统进行初始化,配置合理的运行方式。包括系统时钟、AD采样方式及时间、TIM高级定时器与通用定时器的配置。AD中断与电机控制环路执行同频率,高级TIM进行SVPWM三相脉冲的产生,CH4用以触发AD电流采样。相关流程见图2。
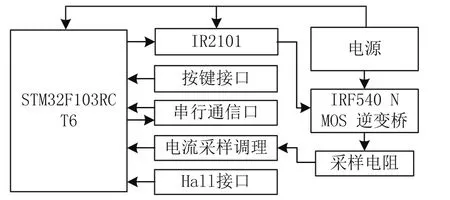
图1 硬件电路组成
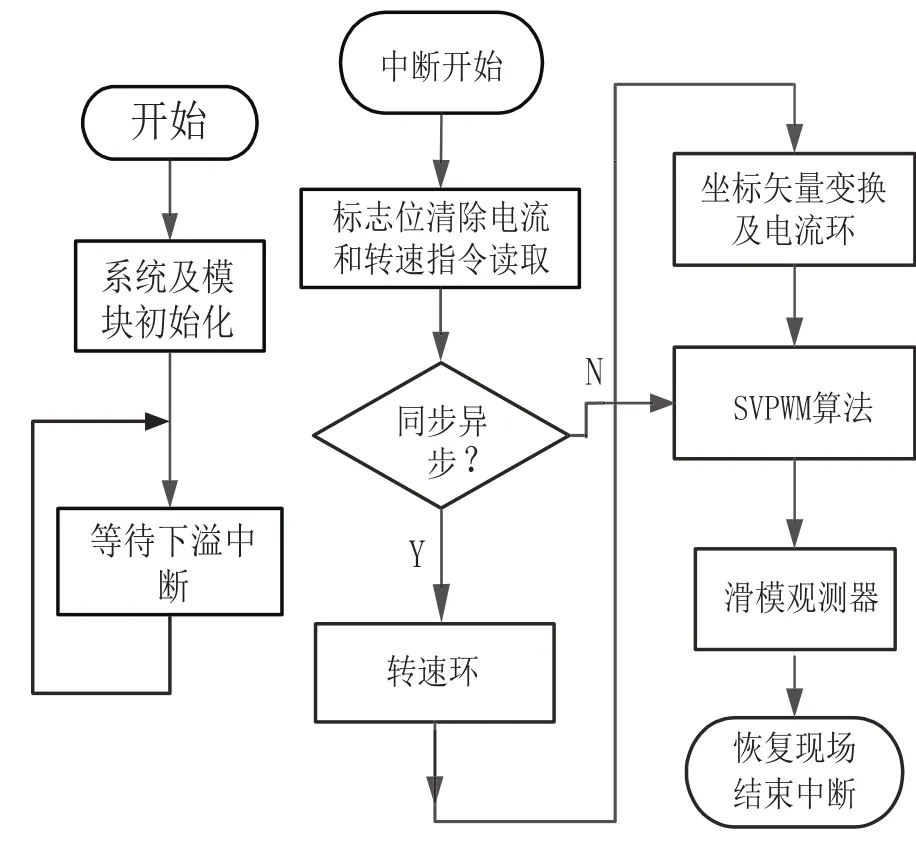
图2 程序流程
2.2 按键及串口消息解析
通过读取I0口或串口接收到的数据。确定控制器驱动何种电机,保存相关标志位,在算法运行时通过查询标志位完成整机算法。
2.3 坐标变换及环路调节器
对永磁同步电机控制采用Id=0的无传感器驱动方式,在AD模块EOC中执行FOC控制环。AD采样值通过Clark变换和Park变换得到同步坐标系下的直流DQ轴分量,通过查询转速指令,给定转速环输入。同样,查询直流D轴分量,给定磁链环输入。通过离散化的PI环路调节器,最终转换成控制参考信号,作为SVPWM的给定。
2.4 SVPWM电压空间矢量
电压空间矢量模块包括扇区N,切换时间X、Y、Z及t1、t2的计算,计算完成时间更新高级定时器CH1-CH3比较寄存器值。
3 硬件设计
以Stm32单片机最小系统构成控制算法执行环节,通用输入输出接口完成控制信号与反馈信号的交互。
3.1 控制及驱动单元
单片机执行控制算法,计算实时输出控制量,由高级定时器TIM1输出包含控制信息的互补脉冲方波。通过IR电桥驱动器增强脉冲驱动能力,完成电压等级转换,驱动功率MOS管。
3.2 电流采样
电流硬件电路支持隔离型电流传感器和低成本的采样电阻。本硬件采用三电阻采样,采样后的电流输入由运算放大器构成的信号调理电路,调理电路由同相放大器,跟随器及低通滤波构成。整形后由单片机AD进行采集,以Q12格式定标成以2048为中点的数字量。
3.3 串行通信口及按键接口
串行接口用以接收上位机发送的控制指令和向外发送系统实时信息,按键接口提供用户控制策略模型的切换及转速增减操作。
3.4 霍尔接口
霍尔接口用以输入6步霍尔脉冲,连接单片机内部定时器XOR霍尔接口,反馈转子机械转速与空间位置。
4 调试分析
控制器分别以永磁同步电机与异步电机进行试验,永磁同步电机采用Id=0,传感器与滑模转速观测器并联运行。
感应电机的参数为:额定功率PN=60 W,额定电压UN=220 V,频率fN=50 Hz,额定转速nN=1 425 r/min。
永磁同步电机参数为:UN=24 V,额定功率PN=200 W,定子电阻Rs=0.985 Ω, D轴电感Ld=Q轴电感Lq=2.56 mH,永磁磁链φf=0.051 Wb。
设置控制器为异步电机驱动模式,三相逆变电路输出经过一阶低通滤波,得到三相对称正弦波,作为逆变器输出的基波分量。频率可通过控制SVPWM的调制波更新时间,即马鞍波更新速率控制,电压由调制深度控制,见图3~图5。
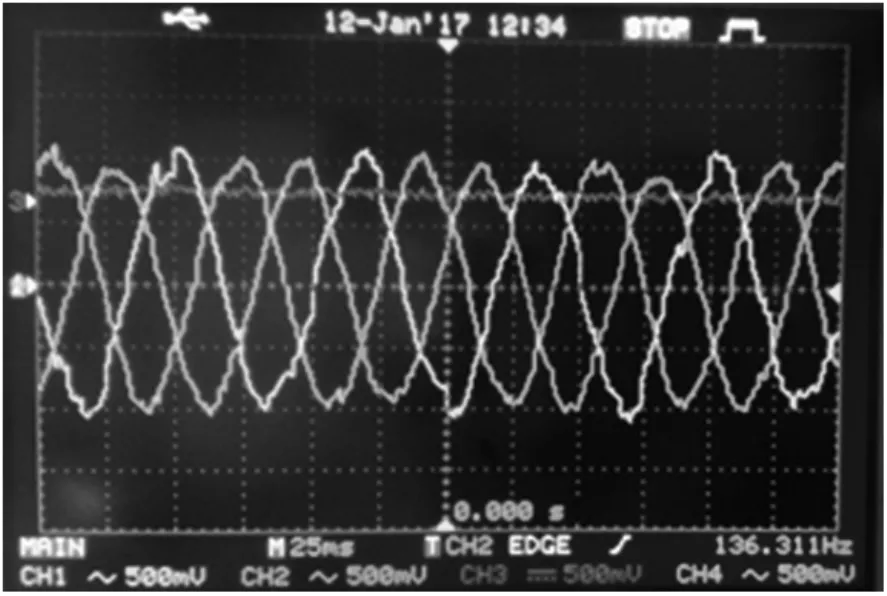
图3 控制器三相输出基波分量
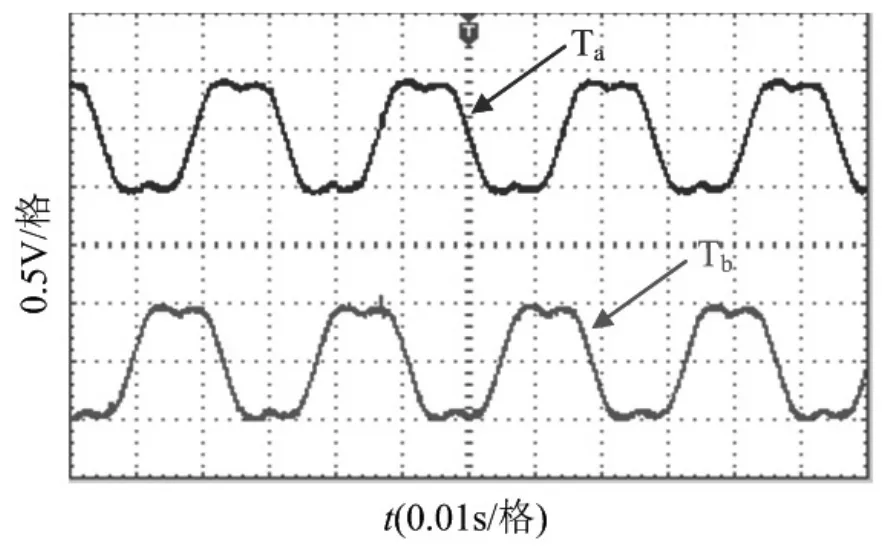
图4 SVPWM两相调制波波形
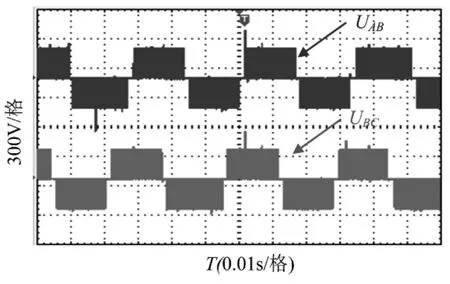
图5 AB相电压波形
永磁同步电机实验,电机空载启动,参考转速给定为n=1 420 r/min,转速指令经过转速环滤波器,稳定将电机转速斜坡提升。在到达给定转速后,给定n=-1 420 r/min,电机反转转速下降至二次给定转速,见图6。
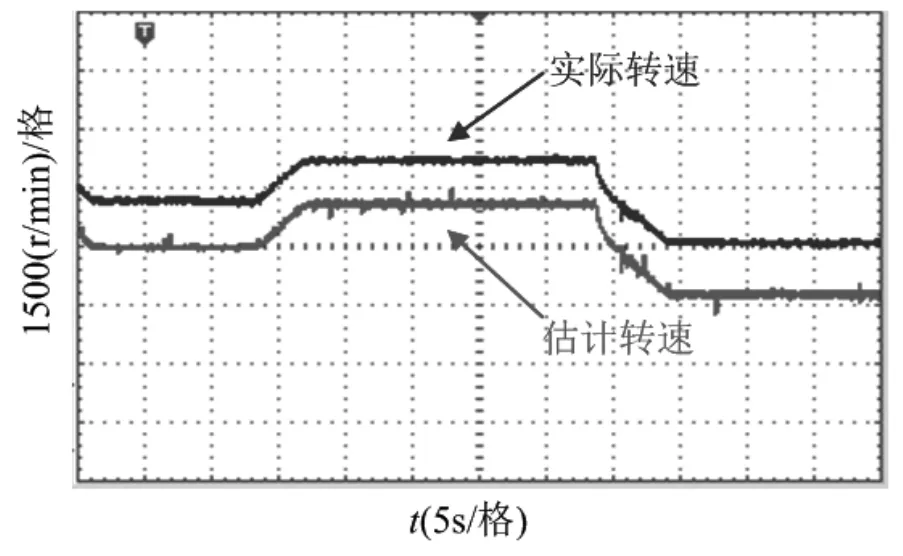
图6 实际转速与估计转速
滑模电流观测器的强鲁棒性,在中高速时,估算值都能很好的跟踪实际值,反应了转速及转子位置角辨识的准确性,见图7。
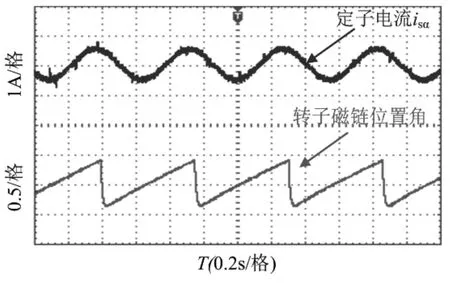
图7 alpha相电流观测值与转子磁链估算位置角
5 结语
本文提出一种附带异步电机驱动功能的永磁同步电机矢量控制器,通过控制环程序的执行与关键标志位的查询,实现了双电机驱动的功能。其中永磁同步电机由励磁转矩解耦的矢量变频算法控制,系统的动态性能与控制精度达到了很大的提高。利用FOC环路中的SVPWM模块,合理附加异步电机驱动功能,节约程序代码且增强了通用性。在中小功率交流拖动场合,风机、泵类、压缩机等负载通常由异步电机或永磁同步电机构成,设计具有经济实用性与通用性。
[1]高嵩,史激特,李长红,等.基于DSP的永磁同步电机矢量控制系统设计[J].测控技术,2016,35(4):75-78.
[2]赵裕光.基于STM32的永磁同步电机矢量控制系统的研究与设计[D].桂林理工大学,2016.
[3]张慧颖,李化庆,陈伟.基于STM32无刷直流电机无传感控制系统设计[J].吉林化工学院.2016.33(7):44-49.
[4]姜红,郎孝宇,杨明,等.基于自适应全阶观测器的永磁同步电机参数辨识策略[J].微电机,2016,49(11):37-44.
[5]邵珠荣.基于扩展卡尔曼滤波的永磁同步电机自适应转速控制研究[D].大连海事大学,2016.
[6]兖涛,刘军,杨明亮,等.基于高频注入法永磁同步电机控制研究[J].电气自动化,2015,37(3):7-9.
[7]张全,竺韵德,陈阿三,等.基于滑模观测器的永磁同步电机无传感器矢量控制[J].计量与测试技术,2016,43(8):45-48.
[8]陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2003.
[9]周鹗.电机学第三版[M].北京:水利电力出版社,1995.
[10]李能.永磁同步电机矢量控制系统的建模与仿真研究[J].机械工程师,2017(2):46-48.
Realization for Small and Medium Power PMSM Vector System Basing on Stm32 Micro Controller
YangJunxiang, Jiang Lin, Li Kun, LiuLianghong
(
School of Electrical Engineering and Information, Southwest Petroleum University,Chengdu 610500, Sichuan )
In order to solve the problemsof low versatile, non-ideal in cost-effectand low control accuracy in present PMSM controller, a new frequency conversion controller basing on Stm32 is put into apply. The controller adopts the magnetic field orientation algorithm, analyzes the similarities and differences between the control loop of the control system of asynchronous motor and synchronous motor, realizes a set of codes that can be applied to two kinds of motors at the same time, and can operate in both sensor and sensorlessmode. It is suitable for different applications and needs of users. The Stm32 micro controller with high performance price ratio improves the system accuracy and costs, which meets the requirements of technology advancement and economic practicality. The feasibility of the strategy is proved by theoretical analysis and experimental verification.
PMSM; Vector control; Sensorless control; VVVF
TN876-34;TP33
A
1674-2796(2017)06-0010-04
2017-06-18
杨俊翔(1992—),男,硕士研究生,主要从事观测器,电力电子及电气传动控制方向的研究。
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
组合机床与自动化加工技术(2014年12期)2014-03-01
