
电励磁同步电机无传感器控制方法研究
2017-12-25 01:11:50梁凤强孙顺新赵军赵同健朱军
电动工具 2017年6期
梁凤强,孙顺新,赵军,赵同健,朱军
( 1.国网临沂供电公司,山东 临沂 276000;2.天元建设集团有限公司,山东 临沂 276000;3.临沂市恒源热电集团有限公司,山东 临沂 276000 )
电励磁同步电机无传感器控制方法研究
梁凤强1,孙顺新2,赵军3,赵同健2,朱军3
( 1.国网临沂供电公司,山东 临沂 276000;2.天元建设集团有限公司,山东 临沂 276000;3.临沂市恒源热电集团有限公司,山东 临沂 276000 )
针对同步电机传统的机械位置传感器存在的缺陷,提出一种基于高频信号注入的无速度传感器同步电机速度和位置检测方法。在电励磁同步电动机调速系统的基础上,建立转子位置观测的数学模型,在q轴注入高频电压信号,选用带阻滤波器对转子高频电流信号进行有效提取,设计位置锁相环对电机运行转速和位置进行在线辨识,实现对转速和位置准确地估计。仿真和实验结果表明该检测方法具有较好的检测和跟踪效果。
同步电机;高频注入;无传感器;转子位置检测
0 引言
电励磁同步电机相对其他电机具有转动惯量较小、控制精度高、功率因数高和过载能力强等多方面优势,已广泛应用于水泵、机车、船舶等诸多工业领域。针对优化永磁同步电机的自身运行性能的研究,已成为国内外关注和研究的热点。
传统的速度与位置检测通常采用机械式编码器,其在运行过程中必然降低系统的可靠性,带来系统结构成本增加等问题,研究无速度传感器转子位置和速度的估计方法有:高频信号注入法、模型参考自适应法、卡尔曼滤波估计法、反电动势估计法,本文针对永磁同步电机速度与位置检测进行研究。
1 概述
模型预测控制(model predictive control,MPC)出现于二十世纪70年代工业过程控制领域,其在处理非线性系统复杂约束型优化问题时展现出强大优势,在建筑物节能控制、机器人控制、飞行器控制等多个领域得到成功应用。
通常,研究无速度传感器转子位置和速度的估计方法为高频信号注入法、模型参考自适应法、卡尔曼滤波估计法、反电动势估计法。目前,国内学者针对电励磁同步电机的无速度传感器方面的研究,逐步深入和完善。运用电流和电压的气隙磁链观测结果之差作为误差,通过自适应率进行调节得到转子的位置和速度。运用反电动势法的控制方法,建立虚拟中性点电压来提取反电动势信号,通过软件锁相环获得准确的电机位置和转速信息。
本文提出了一种基于高频信号注入的无速度传感器同步电机速度和位置检测方法。该方法在电励磁同步电动机调速系统的基础上,建立转子位置观测的数学模型,在定子侧q轴注入高频电压,通过带阻滤波器提取转子高频电流信号,采用位置锁相环对电机运行位置和转速进行跟踪辨识,从而实现对同步电机转子位置和转速的准确估计。
2 数学模型
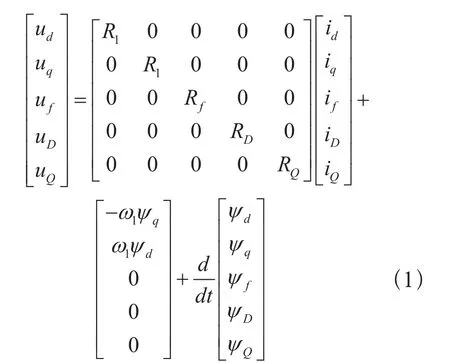
忽略磁路饱和与铁心损耗以及忽略温度对电机参数的影响情况下,电励磁同步电机在两相同步旋转d、q坐标系下电压方程可以描述为:
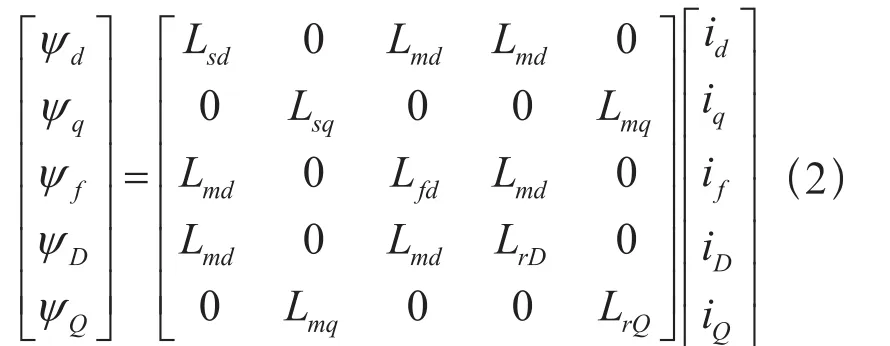
磁链方程为:
3 辨识算法
为实现对电励磁同步电机速度的观测,本文采用高频信号注入的同步电机无传感器位置和速度检测方法。其原理图如图1所示。
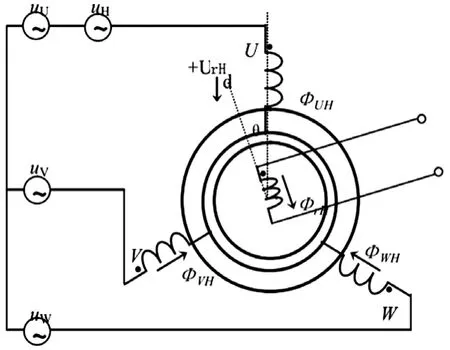
图1 定子高频信号的同步电机位置及速度检测电路原理

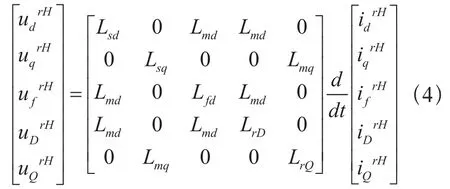
在高频电压信号注入时,要求系统能有效提取在定子电压上的高频注入信号。由于同步电机结构的限制,由式(4)可以看出,分别从定子绕组dq轴和转子绕组注入高频电压信号。本文采用定子q轴注入定频为300 Hz高频电压的方法,其转子电流频谱图如图2所示。
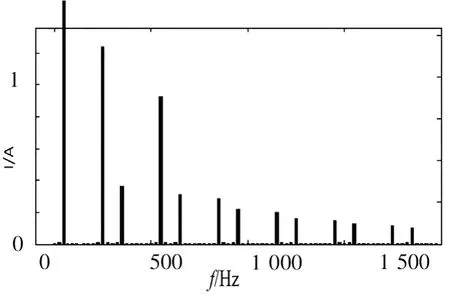
图2 转子电流频谱
通过频谱图2分析可以看出,电机在静止状态下,当转子的位置角定向正确时,转子感应电流中不存在高频电流信号。即从而可有效辨识转子的转速和位置信息。当转子位置存在估计误差时,转子的感应电流会出现脉动,则

由上述分析可知,转子电流中直流分量和脉振分量所占比重小且谐波分布比较单一,对高频信号提取的影响较小。设估计的转子位置信号角为,实际的转子位置角为,则转子误差角为其数量关系如图3所示。
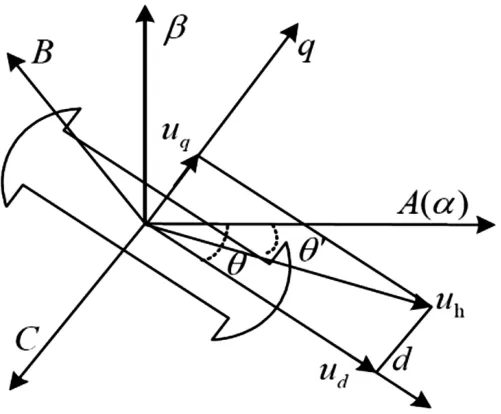
图3 同步电机空间矢量
选取注入定子q轴的电压信号幅值为:


式中:

对转子高频信号通过位置锁相环进行锁相处理,可得到转速信息和转子位置信号。转子位置锁相环算法结构见图4。
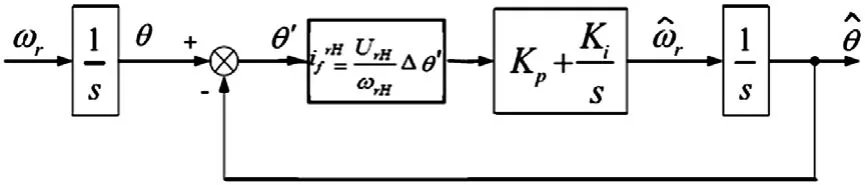
图4 转子位置锁相环的结构

图5 同步电机无传感器系统结构
4 仿真分析
为了进一步验证本文算法的正确性,搭建PWM功率变换器的电励磁同步电机矢量控制系统实验平台,通过在MATLAB的simulink中搭建仿真模型,经反复调试达到理想结果。所使用电机的参数如表1所示。
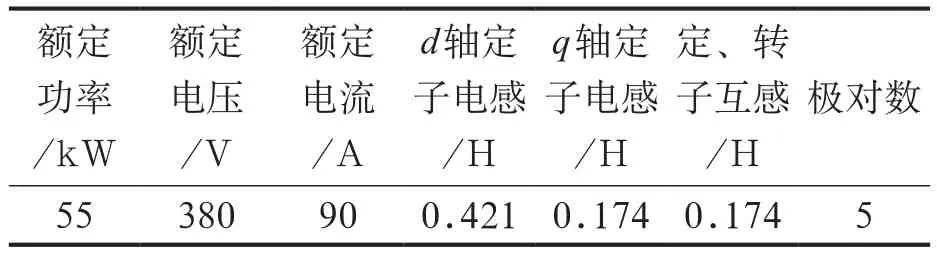
表1 电励磁同步电机调试参数
从图6中可以得出转子位置估计值和实际值之间误差较小,跟踪精度高。

图6 转子位置实测值与估计值对比
图7 为实测值与估计值对比图,可见本文方法检测到的电机速度准确,加减载的过程中转速跟踪效果平稳。
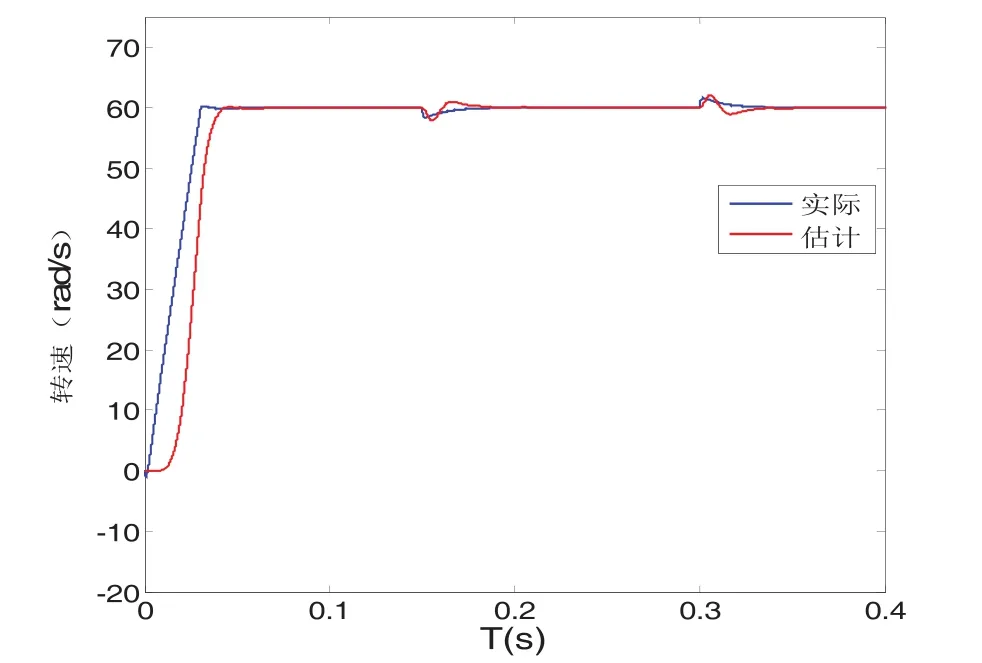
图7 转速实测值与估计值对比
5 结语
本文提出的一种基于高频信号注入的同步电机无传感器位置和速度检测方法,该方法运用结合同步电机自身固有参数,在定子侧注入高频电压,提取转子高频电流信号,通过位置锁相环对电机运行位置和转速进行在线辨识,实现对位置和转速地准确估计,提高了控制系统的可靠性。仿真结果验证该控制方法具有较好的检测性能。
[1]刘辉,张斌.基于无源控制的无速度传感器异步电机调速控制[J].传感器与微系统,2016,35(6):45-51.
[2]符晓,戴鹏,伍小杰,等.电励磁同步电动机模型预测控制[J].浙江大学学报:工学版,2011,45(5):815-863.
[3]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2010.
[4]周扬忠.电励磁同步电动机直接转矩控制理论研究及实践[D].南京:南京航空航天大学,2007.
[5]杨成峰,林鹤云,刘细平.混合励磁同步电机调速系统的控制策略[J].电机与控制学报,2008,12(1),27-33.
[6]谭国俊,吴轩钦,李浩,等.Back-to-Back双三电平电励磁同步电机矢量控制[J].系统电工技术学报,2011,26 (3):36-43.
Research on Sensorless Control Method of Electric Excitation Synchronous Motor
Liang Fengqiang1, Sun Shunxin2, Zhao Jun3, Zhao Tongjian2, Zhu Jun3
( 1. State Grid Linyi Power Supply Company, Linyi 276000, Shandong;2. Tianyuan Construction Group Co., Ltd, Linyi 276000, Shandong;3. Linyi City Hengyuan Thermal Power Group Co., Ltd, Linyi 276000, Shandong )
In view of the existing problems of synchronous motor system with conventional mechanical sensor, a rotor position estimation method without mechanical sensor was suggested in this paper based on high frequency signals injecting into the synchronous motor. Based on the principle of the rotating transformer and the magnetic circuit structure of the synchronous motor, the mathematical model of the rotor position observation was established.The high frequency voltage was injected into q axis of the stator, and the high frequency current signalof rotor is extracted. The rotor position and speed information was identified online by using the position phase locked loop which estimated the speed and position information accurately.The proposed results was proved to have high detection accuracy.
Synchronous motor; High frequency injection; Sensorless control; Rotor position detection
TM 341
A
1674-2796(2017)06-0009-04
2017-08-10
梁凤强(1990—),硕士研究生,助理工程师,主要从事电力电子技术、电机控制与优化研究。
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
防爆电机(2020年6期)2020-12-14 07:16:54
电子测试(2018年14期)2018-09-26 06:04:00
电子制作(2018年1期)2018-04-04 01:48:34
电测与仪表(2017年24期)2017-12-19 05:15:22
大电机技术(2017年3期)2017-06-05 09:36:02
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2015年9期)2015-04-09 11:59:28
大电机技术(2015年5期)2015-02-27 08:22:28
水电站机电技术(2014年4期)2014-10-13 08:30:07
