
张力腿平台长距离湿拖研究
2017-12-24 13:28:17魏佳广李怀亮黄山田张立邦王浩宇
石油工程建设 2017年6期
魏佳广,李怀亮,黄山田,张立邦,王浩宇,李 可
海洋石油工程股份有限公司,天津 300461
张力腿平台长距离湿拖研究
魏佳广,李怀亮,黄山田,张立邦,王浩宇,李 可
海洋石油工程股份有限公司,天津 300461
TLP平台的海上运输、安装均属高技术、高风险、高难度作业,其长距离湿拖则更具挑战性。以流花油田某TLP平台长距离湿拖为例,在给出了适应中国海域TLP平台长距离湿拖设计尝试方案的基础上,计算了TLP平台的拖航力,配置了湿拖资源(包括拖轮选型及配合方式),并对整个运动过程进行了数值分析。模拟计算结果表明,该尝试方案给出的关键设计参数均满足设计要求,可为我国TLP长距离湿拖工程实践提供指导。
TLP平台;长距离湿拖;拖航阻力;运动分析
世界浅海油气资源日益枯竭,深水已成为油气储量和产量的主要接替区。在“十二五”期间之前,我国海洋油气资源开发主要集中在渤海、黄海、南海西部等浅海区域,我国海洋工程实践经验仅局限在300 m水深之内,此水深范围的工程设计、建造、安装、运行和维护等方面的技术与国外基本同步。随着浅海石油天然气资源勘探开发的日益枯竭,深水油气开发是世界油气开发的大势所趋[1],“十三五”期间我国深海油气资源开发也将迎来空前的发展良机。
目前应用于深水开发的浮式系统主要有SPAR、SEMI、FPSO、TLP四种结构形式[2]。TLP(Tension Leg Platform)平台作为国际上深水油气田开发设施中的一种重要形式,在国外已有近30年的应用历史,目前全球有近30座TLP平台在使用,而TLP平台的海上运输、安装在我国尚属首次。TLP平台无论是模块的重量、结构型式等自身条件,还是水深限制等外部条件,其长距离湿拖及海上安装都存在着极大的技术与风险挑战[3]。
本文基于流花油田某TLP平台前期工程设计研究,主要从TLP的基础参数、湿拖影响因素、拖航阻力、湿拖运动分析及湿拖方案设计等几个方面,针对TLP平台的安装难点之一长距离湿拖进行研究,为工程实践提供理论指导。
1 流花油田TL P平台简介
流花某油田位于中国南海珠江口盆地,油田水深约403.7 m,油田开发的前期工程设计方案中首次考虑在国内应用TLP平台。流花油田TLP平台由上部组块、浮体(hull)、张力腿(tendon)、顶张力井口立管和桩基础(foundation pile) 构成[4],其概念设计的主要组成及各部件参数见表1。本刊2017年第4期的文章中对该平台的概况已有介绍[5],本文着重研究该平台的长距离湿拖运输工艺。
2 某TL P平台湿拖方案设计
2.1 湿拖路线
流花油田某TLP平台假定于青岛船坞建造,并从青岛码头湿拖至流花油田现场,湿拖航程约1 400 n mile,属于长距离湿拖。湿拖对航线的选择、航速的设计、主拖资源的配置、应急预案的制订要求非常高。其湿拖路线主要途径青岛港、渤海、上海、舟山港、台湾海峡、终至南海流花目标油田。湿拖工艺流程主要为:青岛船坞出港→青岛外锚地倾斜试验→TLP平台调载(转换为湿拖模式,吃水与TLP出港时吃水设计不同)→湿拖拖带系统连接及湿拖准备→主拖轮湿拖TLP平台至流花油田现场→TLP海上安装。TLP平台湿拖路线示意见图1,湿拖参数见表2。

表1 TL P平台基础参数
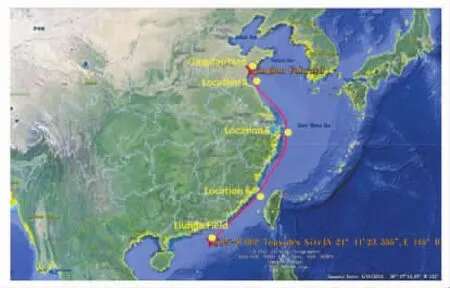
图1 流花TL P平台湿拖路线示意

表2 流花TL P平台湿拖参数
2.2 湿拖阻力及资源配置
湿拖阻力的分析对于湿拖资源配置、湿拖速度的设计、工期的预估、方案的制订非常关键。主拖轮的拖航能力取决于湿拖阻力的大小,一般来说,湿拖阻力由三个因素组成:风载荷、流力和平均漂移力,TLP平台拖力的设计就是要考虑克服这三部分的阻力,此外还要留有一定的安全系数。
TLP平台湿拖计算的环境条件取10年一遇的极端海况环境条件[6],见表3,并以此确定拖轮资源配置(拖轮选型)。张力腿平台可以采用平行拖拉方式,也可以采用对角方向拖拉方式,对角向拖拉方式比平行拖拉方式通常需要更大的拖力。

表3 TL P湿拖环境条件(10年一遇)
根据上述湿拖环境条件,计算流花TLP平台湿拖吃水15 m时拖航阻力与速度的关系曲线,见图2。

图2 TL P平台湿拖阻力与拖航速度的关系
由上述计算结果可知,当湿拖速度分别达到3、4、5 kn时,对应拖航阻力分别达到4 640、6 310、8 600 kN,若按照湿拖5 kn航速来算,则所需拖航系柱拉力大于8 600 kN,再考虑80%的效率,可得系柱拉力不得小于10 750 kN。据此配置拖轮资源,根据国内大部分拖轮资源的系柱力设计规格,可选择采用3条拖轮主拖TLP的方式进行湿拖,见表4、图3。
2.3 运动分析
青岛至流花油田航程约1 400 n mile,按照平均拖速4 kn计算,航行时间约15 d,因此长距离湿拖需要制订多种风险应急预案,以确保安全、顺利湿拖TLP平台至油田现场。
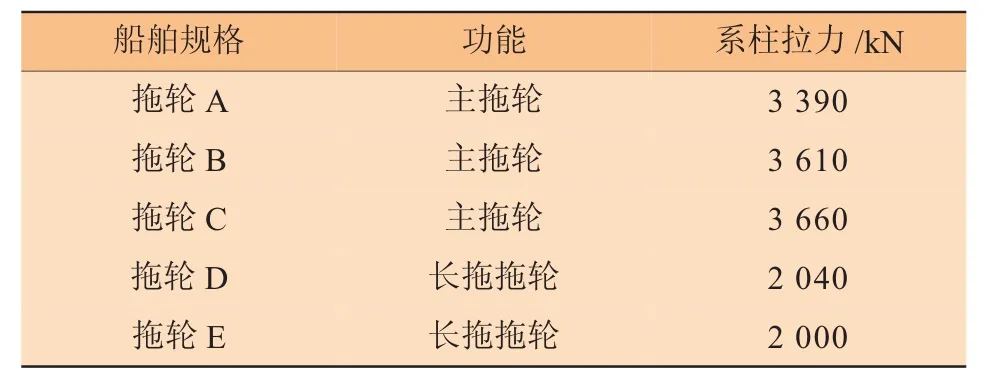
表4 TL P拖轮配置
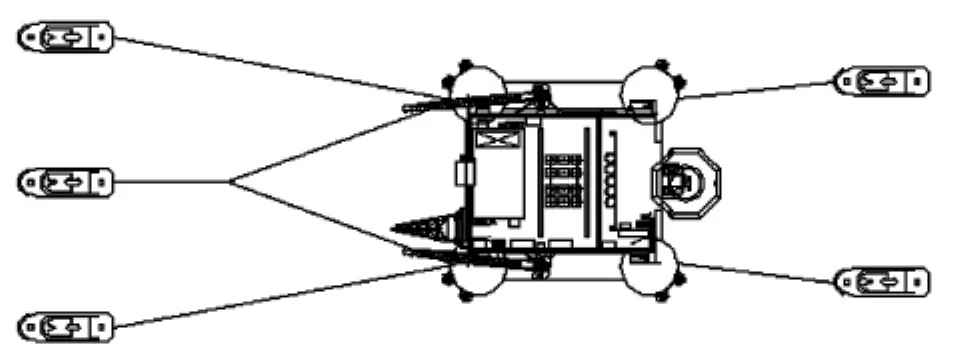
图3 TL P平台湿拖方式
拖航过程中最常出现的情况是迎浪,即波浪从船首到船尾,为使计算结果更加全面可靠,对±45°方向来波情况也需要计算[7]。图4为TLP模型,图5为横摇运动的幅值响应函数RAO分析结果。
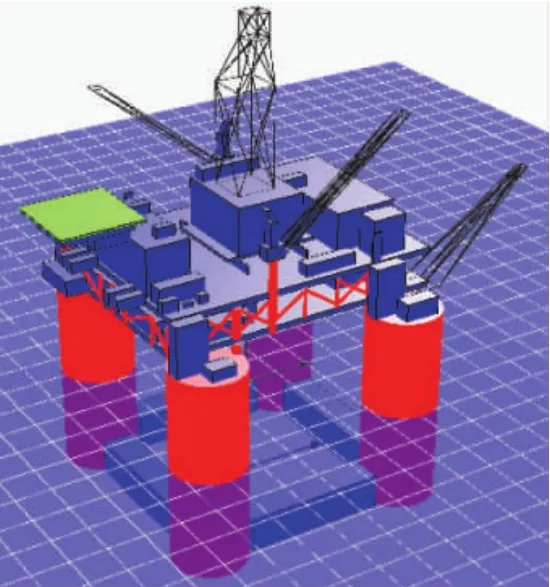
图4 TL P平台模型
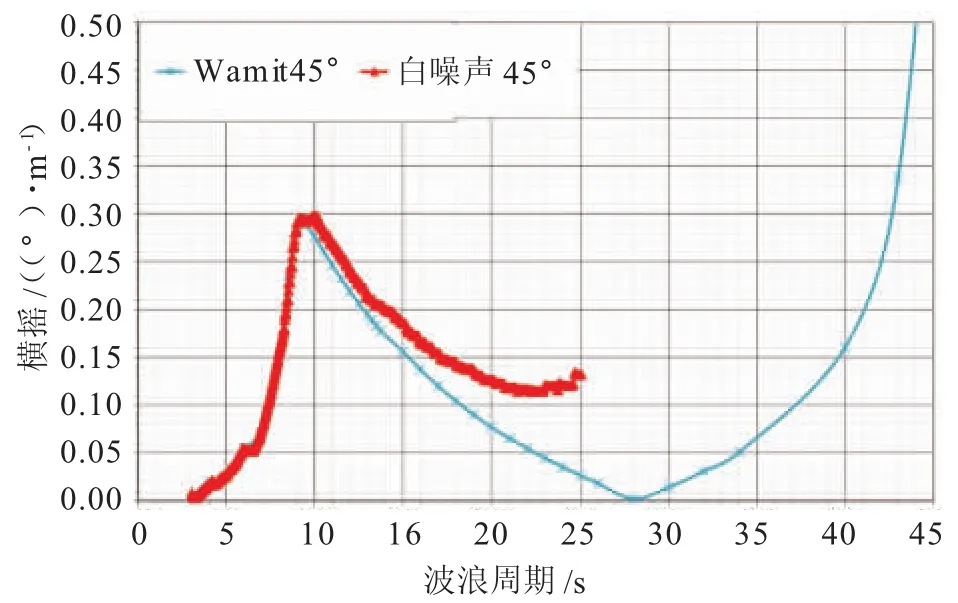
图5 TL P平台运动分析
从上述计算结果得到,对于10年一遇的非飓风环境工况,最大横倾角7.69°,TLP平台上部钻机重心最大横向加速度为0.180 g(g为重力加速度);对于10年一遇的飓风环境工况,最大横倾角7.94°,TLP平台上部钻机重心最大横向加速度为0.183 g,平台的倾斜和摇晃均已经考虑在横向和纵向加速度中。针对15 m吃水在非飓风工况下和25 m吃水在飓风工况下作了分析,按照GLNoble Denton规范,为保证TLP平台在10年一遇飓风环境中能稳定住,所需要的最小系柱拖力为2 690 kN。因此应根据平台的摇晃、升沉起伏情况,选择好的天气窗口湿拖TLP平台。
3 结束语
本文以流花油田某TLP平台长距离湿拖为例,在尝试给出了适应中国海域的TLP平台长距离湿拖设计方案的基础上,计算了TLP平台的拖航力,配置了湿拖资源,并对整个运动过程进行了数值分析。模拟计算结果表明,尝试给出的关键设计参数均满足设计要求,可为我国TLP长距离湿拖工程实践提供指导。
[1]段梦兰,陈永福,李林斌,等.海洋平台结构的最新研究进展[J].海洋工程,2000,18(1):86-90.
[2]张智,董艳秋,唐友刚,等.1990年后世界TLP平台的发展状况[J].中国海洋平台,2004,19(2):35-39.
[3]刘锦昆.深水油气田开发海工平台设施及其应用[J].中国造船,2009,50(11):58-64.
[4]冯加果,王世圣,李新仲,等.张力腿平台湿拖完整稳性及破舱稳性研究[J].中国海洋平台,2011,26(3):40-46.
[5]魏佳广,刘浩,黄山田,等.基于半潜船的TLP平台干拖运输研究[J].石油工程建设,2017,43(4):37-40.
[6]喻西崇,谢彬,金晓剑,等.国外深水气田开发工程模式探讨[J].中国海洋平台,2009,3(6):52-56.
[7]李新仲,王桂林,段梦兰,等.深水油气田开发中的浮式平台新技术[J].中国海洋平台,2010,4(8):36-41.
Research of TLP long distance wet-towing
WEIJiaguang,LIHuailiang,HUANG Shantian,ZHANG Libang,WANG Haoyu,LIKe
Offshore OilEngineering Co.,Ltd.,Tianjin 300452,China
TLP platform is an important type of floating system in the international deepwater oil and gas field development.The offshore transportation and installation belongs to high technology,high risk and difficulty,especially for long distance wet-towing of TLP.The triallong distance wet-towing scheme of the Liuhua Oilfield TLP is designed to suit China sea area conditions.The towing force calculation,tugboat selection and cooperative wet-towing operations are studied,and the whole motion process during TLP wet-towing is numerically analyzed.The results show that the key design parameters of the trial wet-towing scheme meet the design requirements and have a certain reference for the TLP long distance wet-towing project in China.
TLP;long distance wet-towing;drag force;analysis of motion
10.3969/j.issn.1001-2206.2017.06.013
国家科技重大专项经费资助、工信部“500 m水深油田生产装备TLP自主研发”资助。
魏佳广(1986-),男,甘肃白银人,工程师,2011年毕业于辽宁石油化工大学化工过程机械专业,现主要从事海洋石油平台等设施安装设计及相关技术研究工作。Email:weijg@mail.cooec.com.cn
2017-10-02
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:35:00
水上消防(2022年1期)2022-06-16 08:06:56
珠江水运(2019年9期)2019-06-02 17:00:04
水利规划与设计(2017年8期)2017-12-20 08:24:07
家庭影院技术(2017年12期)2017-02-06 02:32:16
中国海上油气(2015年1期)2015-07-01 17:37:46
水利建设与管理(2015年10期)2015-05-09 08:29:47
现代企业(2015年6期)2015-02-28 18:51:53
舰船科学技术(2015年8期)2015-02-27 15:38:41
石油工程建设(2014年5期)2014-03-20 15:24:41
