
基于分层控制的微网无缝切换研究*
2017-12-20 06:40高廷峰汪海宁施永
电测与仪表 2017年3期
高廷峰,汪海宁,施永
(合肥工业大学教育部光伏系统工程研究中心,合肥230000)
0 引 言
随着用电负荷不断增长、化石燃料的衰竭,清洁能源的利用得到了高度重视;微网作为一种利用清洁能源的有效方式,受到各国广泛关注。微网系统主要特点是既可以与大电网并网运行也可以脱离大电网孤岛运行,而微电网系统在孤岛与并网两种运行模式之间的无缝切换是微电网巫需解决的重要问题[1]。
对等控制、主从控制、分层控制是微网的三种主要控制策略[2-4]。其中,对等控制一般采用Droop模式,并由输出电压与频率的调整来实现功率的分配,控制效果不理想,所以当前微网主要采用主从与分层控制。主从控制中,并网时逆变器采用P/Q模式,处于电流源工作模式;孤岛时,作为主逆变器的储能逆变器需采用V/f模式来提供系统的基准电压和频率。在分层结构中,最上层为配电网管理系统,主要包括两部分配电网管理器和市场管理器,用来对微电网中逆变单元的输出功率进行优化分配,使微电网的整体运行达到最优状态;中间层为微网中央控制器,为微电网和大电网提供接口,协调控制底层微源与负荷;底层为微源控制器MC和本地负荷控制器LC,接收并执行来自中间层的指令,一般情况下可调度微源需要为系统建立支撑系统的电压参考和频率参考,不可调度微源采用MPPT模式,使此微源处于高效率的工作状态,以达到能源的最优化利用。文献[5]微网双模式工作状态下采用电压/电流加权控制实现系统无缝切换,但在状态转换时需对加权因子进行同步设置。文献[6]中微网系统两种工作模式的切换是通过储能逆变器实现的,但储能逆变器所采用的控制策略对带宽要求较高。文献[7]提出了一种控制器间状态跟踪的无缝切换策略,针对切换过程中暂态影响跟随参数变化的规律进行研究。文献[8]提出了一种能够抑制冲击电流的平滑切换控制策略,但在切换过程中会出现母线电压的振荡,可能会触发孤岛保护动作,不利于系统的安全稳定运行。
上述文献主要针对主从控制结构微网的无缝切换问题进行研究,而分层控制结构微网的无缝切换有待进一步研究。本文主要针对分层控制结构微网的并离网平滑切换问题进行研究。首先对微网并网储能逆变器的控制策略进行介绍,然后对系统切换过程中出现的冲击现象进行分析,提出一种适应于分层控制结构的改进控制器,以使系统暂态过程得到改善;最后,在微网实验平台上对本文所提出的控制器进行了实验验证,从而证明了该改进型控制器的有效性与可靠性。
1 微网结构及控制方法
图1所示为微网系统结构图,主要包括微源、本地负荷以及并网断路器,其中微源包括光伏、风机、储能(蓄电池,超容等),本地负荷可分为重要负荷和非重要负荷。当系统满足并网条件时微网系统通过并网断路器与大电网相连实现并网运行,此时微网的主要目标是降低微网内微源与负荷波动对大电网的影响,使微网等效成一个友好、可控的负荷接入大电网;当大电网发生故障或计划检修时,系统断开并网断路器,微网进入孤岛运行模式,系统需建立稳定的电压和频率。
微网逆变器主电路如图2所示,其中L为滤波电感,Cf为滤波电容,Z为本地负载,Ls为并网电感,Udc为直流母线电压,ua,ub,uc为微网逆变器输出三相电压,Ia,Ib,Ic为滤波电感三相电流,ia,ib,ic为并网电感三相电流,ea,eb,ec为微网交流母线电压。

图1 微网系统结构图Fig.1 System structure diagram of micro-grid
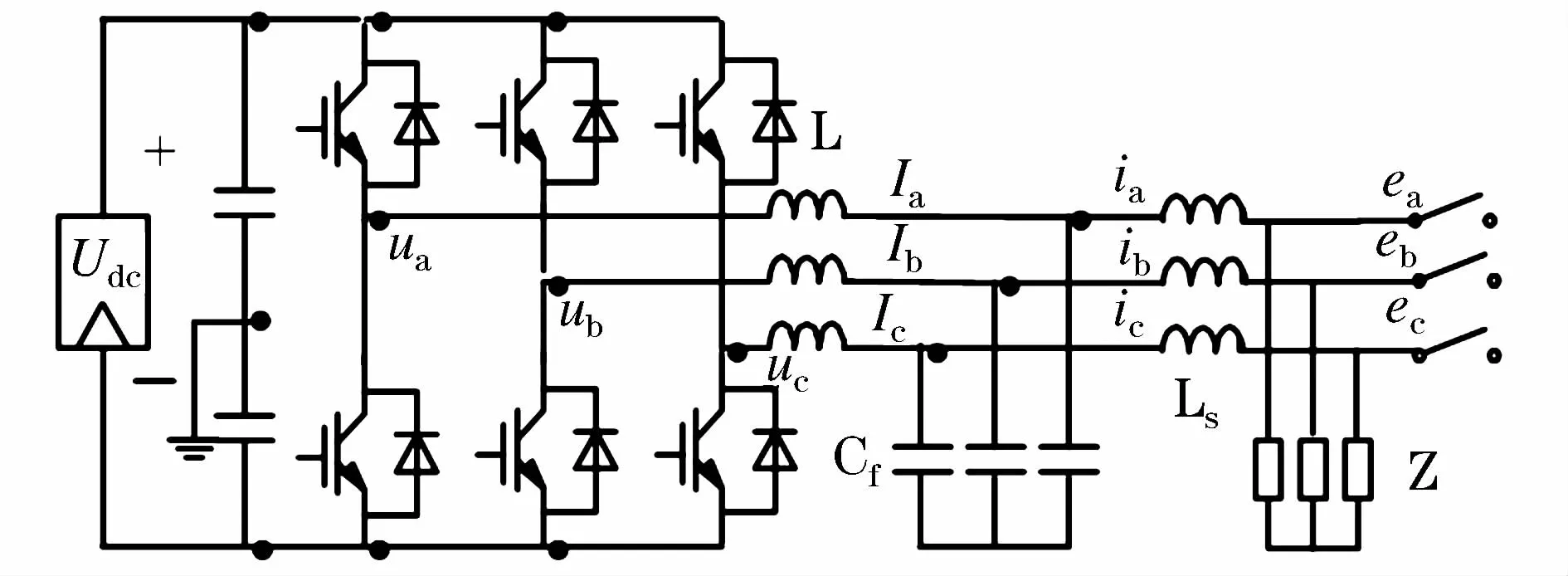
图2 微网逆变器主电路结构图Fig.2 Main circuit structure diagram of micro-grids inverter
1.1 孤岛下垂控制器
微网孤岛运行时要求系统建立稳定的电压和频率,本文采用下垂控制建立一个稳定的电压和频率。孤岛时逆变器运行模型可简化成:逆变器作为一个电压源U∠δ,通过阻抗记为R+j X的线路,与电压为E∠0的微网交流母线相连接。逆变器输出的有功P和无功功率 Q分别为[9-11]:

联立上式可得:

在低压网络中,导线通常呈现为电阻特性,但考虑到逆变器等效阻抗系统中X≫R,R较小可忽略不计,功角 δ也较小,则 sinδ=δ,cosδ=1,上式可化简为:

微网交流母线电压E可由电压互感器实时检测,并利用下垂控制器控制三相全桥输出电压U。因此,由式(5)、式(6)可知,逆变器有功功率 P正比于相角差δ,为了实现逆变器对有功功率P的控制,需使相位差δ=δu-δe发生变化,所采用措施为调节微网逆变器的输出电压U的相角δu。同理,逆变器无功功率Q正比于幅值差ΔU=U-E,为实现逆变器对无功功率Q的控制,需使电压幅值差发生变化,所采取措施为调节微网逆变器输出电压的幅值U。由此得下垂控制方程为:

式(5)~式(8)是逆变器同时实现电压源输出特性和多台并联同步运行的理论基础,孤岛Droop控制器如图3所示。

图3 Droop控制器Fig.3 Controller of Droop
1.2 并网PQ控制器
为了使逆变器输出给定功率,系统需采用恒功率控制模式,即当PCC点频率和电压在允许范围内变化时,逆变器输出功率恒定,处于电流源工作模式。并网运行时,电压幅值、频率、相位受大电网钳制。逆变器与大电网交互的有功功率和无功功率瞬时值可以表示为[12]:

为实现功率和电流的解藕,降低系统复杂度,在Park变换中选取旋转坐标系d轴参考方向与逆变器电压矢量方向相同,则可对功率表达式进行简化:有功功率P只与电流d轴分量id有关,无功功率Q只与电流分量q轴iq有关。从而可以得到电流参考值为:

式(11)、式(12)是并网运行模式下系统保持功率平衡的关键,输出分量实时跟随idref、iqref,实现等参考功率输出。并网PQ控制器如图4所示。
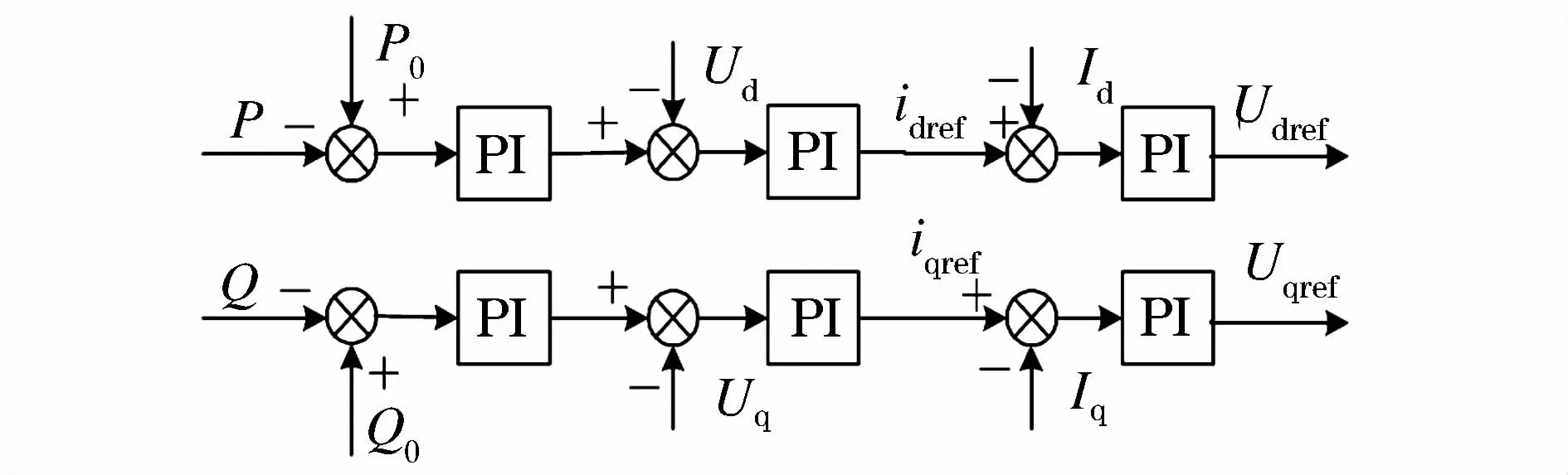
图4 PQ控制器Fig.4 Controller of PQ
对比孤岛Droop控制器和并网PQ控制器可以发现,要研究微网系统在两种模式间的平滑切换,需控制两种控制器在切换瞬间实现平缓变换,才能保证系统不出现较大冲击。据此,提出一种改进控制器。
2 微网无缝切换控制器的改进
微网系统运行时主要有以下几种模式:
(1)孤岛运行模式:系统采用 Droop控制方法,建立系统稳定的电压与频率,各分布式单元按自身容量比例分配负荷;
(2)并网运行模式:系统由并网断路器连接到大电网,系统采用PQ控制微电网输出给定的功率,输出电压跟随大电网;
(3)从孤岛模式到联网模式的切换:为避免在并网时刻因相位突变而产生瞬间冲击,采用预同步控制,在检测到微电网与主网相位差、幅值差在允许误差范围内时吸合并网断路器,切换为并网运行;
(4)从联网模式到孤岛模式的切换:为了满足更高的电能质量的要求,微网有时需断开并网断路器转换为孤岛运行模式。为抑制在模式切换过程中可能出现的的冲击,采用本文控制策略确保控制器前后两种状态相匹配。
离网切并网:此过程需要系统将孤岛模式下的电压参数在并网成功之前调节至与大电网电压的参数基本相同,即在一定的安全误差范围之内,否则在切换瞬间会有较大的电流冲击,影响设备的安全与负荷的用电质量。首先通过对电网侧和微网侧两个端口的电压进行采样和锁相,计算出两个端口的电压幅值差和相位差,将其作为预同步控制的反馈信号,然后计算出预同步控制需要调节的微网系统幅值量和需要调节的系统频率量,进而对系统进行具体调节,从而实现微电网系统离/并网的切换。预同步目的是控制系统PCC处电压各项参数跟随电网电压的各项参数。
并网切离网:在微网并网运行前,由式(5)与式(6)可知,当系统与大电网存在Δδ和ΔU时,系统会产生冲击电流Irush,其大小为:

且微网与大电网间的阻抗X很小,由此可见Δδ和ΔU过大会引起Irush过大,影响设备的正常运行,这就需要对微网侧和电网侧电压幅值、频率和相位进行预同步控制。在经过预同步控制之后电压参数基本跟随大电网,在并网瞬间,前后两种状态相匹配系统不会出现较大的冲击,系统实现了由孤岛向并网的平滑切换。
当电网发生故障或大电网计划检修时,微网系统运行模式发生变换。在并网模式下,系统电压与频率受电网钳制,逆变器等效为恒流源,此时分析电路可得逆变器输出电流为:
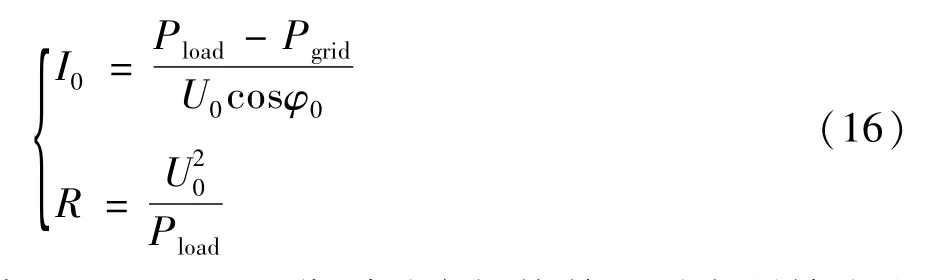
式中I0、φ0和I、φ分别对应切换前后逆变器输出电流和电压;Pload、Pgrid分别为负荷功率、电网输出功率。切换到孤岛时逆变器电压U=RI cosφ,结合式(16)可将逆变器电压变换为:

由式(17)可得知如果在切换瞬间电网Pgrid≠0,就会导致系统有功功率失衡,逆变器电压;U≠U0,即1-Pgrid/Pload≠1,电压U发生变化。为解决由功率不平衡引起的电压变化,采用在模式转换前,使逆变器输出有功等于负荷有功,即电网输出有功Pgrid=0,则U=U0时,系统不会出现电压的变化,从而提高了系统运行稳定性。
由于PQ控制器中PI调节器的原因,导致切换过程中两种控制器前后的状态不匹配,这样会造成输入发生突变,从而产生较大的暂态振荡,出现较大冲击影响系统的稳定运行。针对这个问题,对整体控制器结构进行了改进[13],如图5所示。

图5 改进的控制器Fig.5 Modification of controller
模式切换前,微网处于并网模式,闭合开关S1、S3,断开剩余开关,即图5中线路①导通。此阶段并网PQ控制器的输出作为孤岛Droop控制器的给定,使孤岛Droop控制器在并网模式下实时跟随并网PQ控制器的输出,确保控制器前后两个状态相匹配;模式切换后,微网处于离网模式,闭合开关S2、S4,断开剩余开关,即图5中线路②导通。此阶段孤岛Droop控制器工作,在此之前孤岛Droop控制器始终跟随PQ控制器输出,实现了切换瞬间控制器输出的平缓变换,使得切换暂态影响得以削弱,保证了微网系统运行模式的平滑切换。
3 实验结果
为验证理论分析的正确性,在微网平台上进行试验验证。逆变器主电路采用全桥拓扑,具体参数表1所示。

表1 系统参数Tab.1 System parameters
试验1:微网系统运行在孤岛模式下,在电网条件允许情况时微网由孤岛模式向并网模式切换,实验波形如图6所示。图7所示为微网与大电网在预同步过程,(即由孤岛状态向并网状态的切换)中的相位差和幅值差,在一定时间后微网电压波形与电网电压波形完全重合预同步控制完成。可看出系统响应较快,微网交流母线电压实现了与电网电压的准确同步,切换过程没有冲击,系统实现了离并网模式间的的平滑切换。并网成功后逆变器输出给定功率,工作在电流源型模式,联同大电网对负载进行供电。
试验2:为了满足更高的电能质量的要求或电网故障,微网须脱网独立运行,此处人为断开并网断路器造成大电网故障现象,迫使系统由并网向孤岛模式切换,系统切换实验波形见图8。由图8可知并网点电压参数在并网断路器断开后能够快速调节至孤岛给定值,建立孤岛条件下稳定电压和频率,电压、电流变化平缓未出现大的跳变说明改进控制器转换前后的两种状态是相匹配,转换过程平滑,改进控制器起到平滑切换作用,脱网后按照各设备容量比例分配负荷。
实验所得结果中所示稀疏曲线是图形上方密集曲线光标区的放大。

图6 微网离/并网切换Fig.6 Micro-grid transferred to grid-connected

图7 预同步过程中相位差/幅值差Fig.7 Phase/amplitude difference of pre-synchronization

图8 微网并/离网切换Fig.8 Micro-grid transferred to islanded mode
4 结束语
本文通过对基于分层控制的微网无缝切换进行分析,原有控制策略能较好的解决在各自稳态条件下的稳定运行问题,但在两种模式切换时存在暂态振荡问题,系统产生较大冲击,影响系统稳定运行。
在微网孤岛切并网时,系统在经过预同步控制之后电压跟随大电网,在并网瞬间不会出现较大的冲击,系统实现了由孤岛向并网的平滑切换;微网并网切孤岛时,两个控制器前后状态不匹配。针对模式切换时可能出现的问题本文对控制器进行改进:并网切离网时,孤岛Droop控制器的输入与并网PQ控制器的输出相等,切换瞬间两控制器前后的状态相匹配,不产生较大冲击。在此基础上建立了微电网实验验证平台,实验结果验证了文中提出的改进控制器策略的正确性、有效性。
猜你喜欢
新世纪智能(语文备考)(2020年9期)2020-12-31
新高考(英语进阶)(2018年1期)2018-04-18
电子制作(2017年7期)2017-06-05
创新作文(小学版)(2017年33期)2017-04-04
通信电源技术(2016年6期)2016-04-20
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年7期)2015-04-09
中国卫生(2014年7期)2014-11-10
