
显微镜载物台温度控制系统的设计
2017-12-20 01:53李海龙朴相范
电子科技 2017年12期
李海龙,朴相范
(延边大学 工学院,吉林 延吉 133002)
显微镜载物台温度控制系统的设计
李海龙,朴相范
(延边大学 工学院,吉林 延吉 133002)
针对目前显微镜载物台温控系统的超调量大、控制温度不恒定等明显缺陷,文中设计了一种基于STC12C5608AD单片机的显微镜载物台自动温控系统。采用高精度的NTC10KB3950K薄膜热敏电阻作为温度传感器,运用模糊自整定PID算法,温度控制范围为0~50.0 ℃,温度控制精度为±0.1 ℃。该温控系统具有操作简单、响应速度快、超调量小、稳定可靠等优点,具有良好的实用性。
温控系统;温度传感器;单片机;模糊自整定PID
传统的光学显微镜只能在常温下观测试样,但在物理、化学、生物、医药、材料和司法检验等技术领域中[1-2],用显微镜观测试样对温度有不同的要求,故而需要一种能够实现自动控制温度的显微镜来满足实际应用的需求。目前常用的低温显微镜基本为大型非固态系统,采用微机控制电磁阀以调节液氮的输出从而达到降温的目的;但其具有结构复杂、成本较高、升温效率低等缺点[3]。为了解决这些问题,本文以国内外现有发表文献为参考依据,提出了一种以STC12C5608AD单片机为主控原件,采用ITO玻璃为控温元件载体的显微镜载物台温度自动控制系统,并根据ITO的驱动特性,采用IRF540驱动导电玻璃的加热功率。本系统采用了自整定的模糊PID控制算法,具有精度高、实时性好、简单易操作等优点。
1 系统结构及工作原理
1.1 系统整体框图
温度控制系统硬件部分由单片机、数据采样电路、ITO电路、键盘、液晶显示屏组成。通过键盘来对载物台所需要的温度值进行设定,设定的温度值及载物台的实时温度变化将由液晶屏显示。温度传感器采用高精度的NTC10KB3950K薄膜热敏电阻。数据采样电路采集实时温度值,将采集到的温度值经过A/D转换后发送给单片机并由液晶屏显示。将实时温度和预先设定的温度之间的差值作为输入变量,利用积分分离式参数自整定模糊PID算法计算并产生控制量,并控制PWM功率驱动电路从而达到通过ITO对系统进行温度控制。与此同时,由数据采集电路将载物台的实时温度数据发送给单片机,形成闭环控制,使载物台的温度能够达到设定值并稳定,从而实现显微镜载物台温度的自动控制。
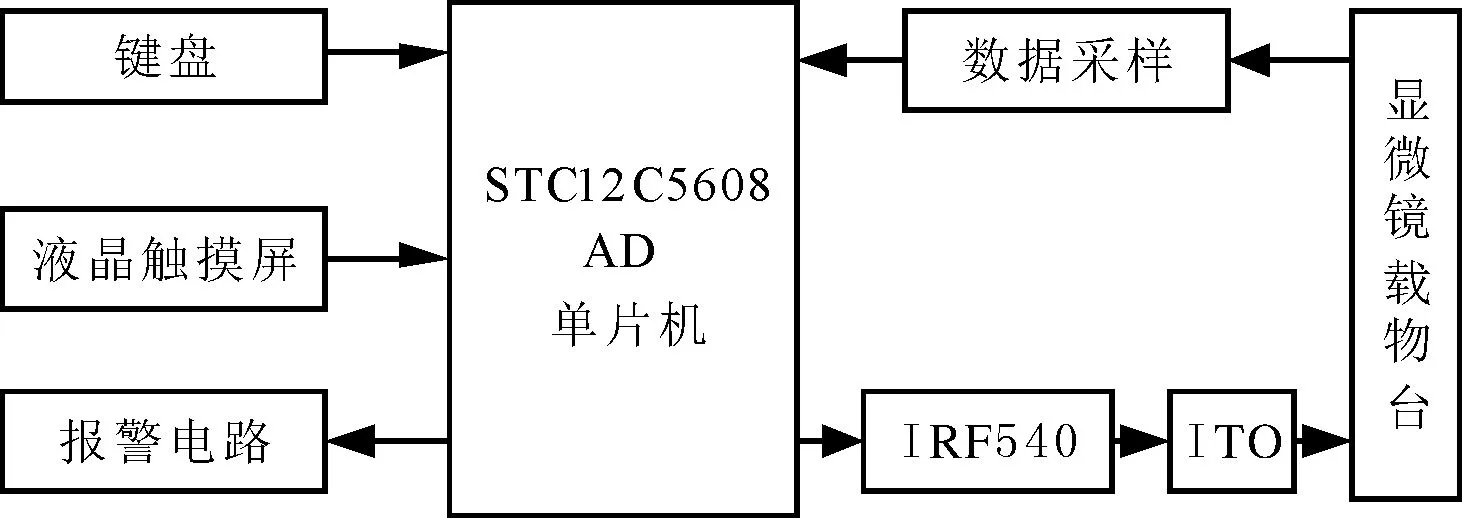
图1 系统原理框图
1.2 铂电阻的非线性校正
铂电阻因其性能稳定、测温范围较宽、标定简单且互换性好等优点被广泛应用于各种温度测量系统中。但与其他测温元件一样,铂电阻的热电阻与温度变化之间也存在着非线性的关系。为了进行非线性校正和抵消系统误差,利用电阻箱测量控制板的A/D转换结果,如表1所示,薄膜传感器非线性比较严重,需每2 ℃做分段线性修正[4]。对铂电阻进行非线性校正通常有牛顿法、迭代法、插值法、查表法等[5-6]。本文采用分段线性修正方法进行校正。分段线性修正方法如式(1),式(2)和图3所示。

表1 线性处理分段表

图2 铂电阻线性处理分段表
(1)

(2)

图3 线性插值
2 系统硬件电路及算法设计
2.1 温度测量电路
数据采集电路由铂电阻传感器,温度检测电路及A/D转换电路构成。高精度的NTC10KB3950K薄膜热敏电阻用于检测温度,它的阻值随温度的改变而改变。温度检测电路根据铂电阻的阻值变化转变成相应的电压变化。A/D转换电路将电压转换成数字信号后发送给单片机以完成温度采集的工作。
NTC10KB3950K薄膜热敏电阻采用两线制接法,如图4所示,同电阻R1、R2、R3和可变电阻W1构成了惠斯通电桥电路,铂电阻的阻值随温度发生相应的变化,从而电桥的压差被破坏,使惠斯通电桥也随之输出变化的电压[7-8]。由于电桥输出的电压比较小,因而采用差分放大电路对其进行放大,其中可变电阻W1和W2的作用是分别对零点和放大倍数进行调整。本设计需要满足的温度变化范围为-10~40 ℃,其电阻的变化范围为961~1 155 Ω,需将此电阻变化转换成相应的电压变化,使其在ADC的输入电压0~5 V范围内,并且尽可能的提高精度。

图4 温度测量电路
2.2 加热器驱动电路
光电耦合器的发光二极管电流和集电极电流偏小时会出现不能饱和现象,具体是下降沿较陡,上升沿缓慢,类似电容充放电效果。发光二极管电流取约10 mA,集电极电流取10 mA以上。
IRF540门极控制电压要在4 V以上才能使MOS管进入饱和状态,工作在放大状态时MOS管会发热。加热片的功率则由STC12C5608AD调节PWM口的占空比来进行控制,占空比由PID调节实现。在计算机控制系统中,PID控制是通过计算机程序实现的,因此它的灵活性很大。运用PID可以改善系统品质,满足不同控制系统的需要。

图5 加热器驱动电路
2.3 PID算法设计
在加热系统中引入积分量是为了提高温度的控制精度,本系统采用积分分离式参数自整定PID控制算法[9-15],当当前温度量与实验设定量的差值相差较大时,将积分常量设定为0,避免PID运算中的积分部分有很大的输出造成失调。当|e(k)|>ε时,去掉积分环节,只进行PD调节,当|e(k)|<ε时,再加入积分调节,这样既消除了静态误差,又提高了系统的控制精度,使系统的控制性能得到了大幅改善。
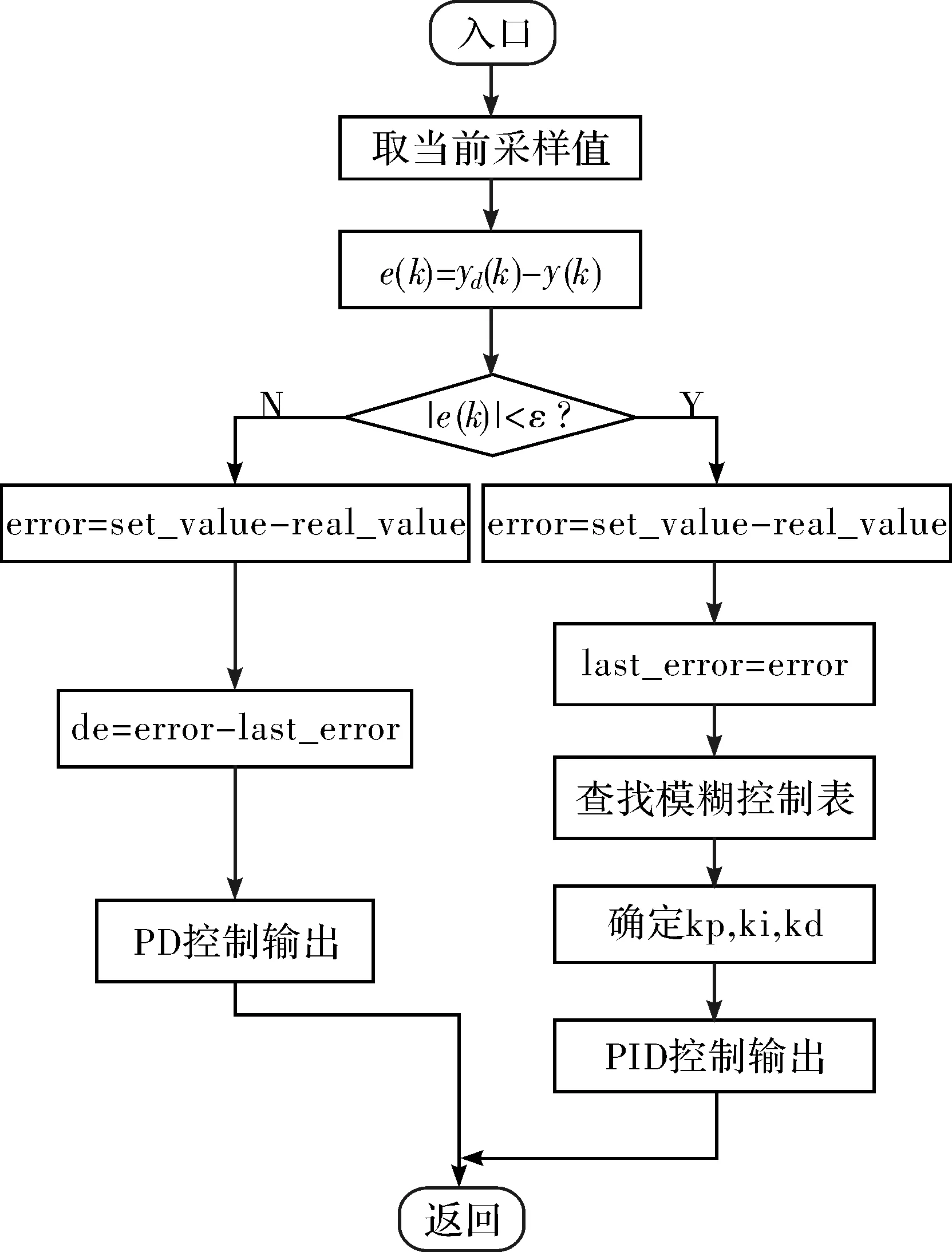
图5 PID子程序流程图
3 实验结果
实验环境:室内温度22 ℃,设定温度为37 ℃,导电玻璃加热电压24 V(PWM 100%时加热电流370 mA),系统运行结果曲线如图6所示。
实验现象:到35 ℃为止PWM输出100%,升温速度约0.6 ℃/s,超过35 ℃控制量开始减小,进入加热—散热平衡点后占空比约17%,加热电流约70 mA。超调量<±0.1 ℃,无震荡,控制误差<±0.1 ℃,从21 ℃上升到37 ℃稳定点约需要30 s。
从控温曲线可以看出,系统响应快、惯性微小、基本没有迟滞,升温速度快(采样频率使用2 Hz),超调量较小,控温精度达到系统要求的 ±0.1 ℃,取得较为理想的效果。对于具有大惯性、大延迟环节、难以建立准确数学模型的被控对象,PID 与模糊控制的复合控制能够满足系统要求,具有良好的速度和稳态精度。

图6 Fuzzy-PID 恒温控制曲线(37.0 ℃)
4 结束语
本文设计的显微镜载物台温度自动控制系统,总结前人的经验采用了模糊自整定PID算法精确地控制温度变化,控制精度达到了系统要求的±0.1 ℃。与传统的温控系统相比,本温控系统响应快,操作简单,控制温度恒定,超调量小,达到了预期的效果,且具有电路简单、工作稳定、成本低廉等优点,从而提高了产品的生产能力和市场竞争力。
[1] 李玲.显微镜投影法测定麻棉混纺产品的混纺比[J].黑龙江纺织,2013(3):20-21.
[2] 刘勇,高娜.基于分段式超前校正的微流控PCR温度控制器[D].传感器与微系统,2012,31(9):93-95.
[3] 王俊听.低温扫描隧道显微镜系统研制及层状材料缺陷研究[D].合肥:中国科学技术大学,2014.
[4] Liu Jiguang,Li Yukun,Zhao Hongyan.A temperature measurement system based on PT100[C].Shanghai:International Conference on Electrical and Control Engineering,2010.
[5] 左广宇,杜超,秦建敏.高精度冻土层温度梯度检测系统的设计[J].电子器件,2016,39(2):469-474.
[6] 刘贺,吕勇.基于同步补偿法的精密温度测控系统设计[J].北京信息科技大学学报,2014(1):85-89.
[7] 梁庆华.矿井全空间小线圈瞬变电磁探测技术及应用研究[D].长沙:中南大学,2012.
[8] 李静,司瑾.电容法测量工业粉尘浓度技术研究[J].电子科技,2016,29(2):148-151.
[9] 蔡淑敏,王亚刚,田涛.智能PID控制算法研究及Matlab实现[J].电子科技, 2016,29(7):43-46.
[10] 范振瑞.基于Matlab的PID温度控制系统设计[J].电子科技,2013,26(8):164-167.
[11] Guo Yingjun,Zhao Yingbao,Lu Zengli,et al.The design ofimproved fuzzy controller based on MCU for central airconditioner[C].Macro:International Symposium on Intelligent Information Technology Application Workshops,2008.
[12] 黄栋,单秋霞,李建杰.基于C8051F350的多点测温控温系统设计[J].电子科技, 2016,29(2):81-84.
[13] 宋萌萌,肖顺根.基于模糊PID算法的WEDM—LS恒速走丝控制系统的设计 [J].江西理工大学学报,2013(5):41-47.
[14] 水源,潘钺,生芳.基于模糊PID的无线温湿度监控系统[J].电子世界,2015(14):159-162.
[15] 张倩,杨耀权.基于遗传算法的PID控制器参数优化方法研究[J].电力科学与工程,2011,27(11):53-57.
Design of Temperature Control System for Microscope Table
LI Hailong, PIAO Xiangfan
(School of Engineering,Yanbian University,Yanji 133002,China)
As the present microscope stage’s automatic temperature control system has its deficiencies of large/big/high overshoot and inconstant temperature controlling, an automatic temperature control system for microscope stage is invented, which is based on STC12C5608AD microcontroller. The system uses the high-precision NTC10KB3950K film thermal resistor as the temperature sensor. And Fuzzy- PID algorithm is applied. What’s more, the control temperature ranges from 0~50.0 ℃. Temperature control precision is less than ±0.1℃. The application result shows that this new system has the advantage of simple operation, fast response, less overshoot, stability and reliability, which means it has certain practicability.
temperature control system; temperature sensor; MCU; fuzzy-PID
2017- 02- 17
国家自然科学基金(21027009)
李海龙(1992-),男,硕士研究生。研究方向:电子智能化技术。朴相范(1962-),男,教授。研究方向:电子智能化技术。
10.16180/j.cnki.issn1007-7820.2017.12.028
TP273;TN371
A
1007-7820(2017)12-106-04
猜你喜欢
天天爱科学(2022年4期)2022-11-08
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
原子与分子物理学报(2020年5期)2020-03-17
小学科学(学生版)(2019年11期)2019-12-09
化工设计通讯(2017年5期)2017-06-05
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
现代电子技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年2期)2016-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
